

4.Выбор комплектных электроприводов звеньев
4.1. Определение основных параметров суеп
Силовой
преобразователь, питающий двигатель,
должен обеспечивать необходимые значения
максимального напряжения в звене
постоянного тока
 ,
длительного тока
,
длительного тока
 и максимального тока нагрузки
и максимального тока нагрузки
 .
.
Максимальное напряжение преобразователя:
 ,
( 4.1 )
,
( 4.1 )
где
 ,
,
 – максимальное значение скорости и
момента на валу двигателя.
– максимальное значение скорости и
момента на валу двигателя.
Определим значение конструктивного коэффициента вентильного двигателя по моменту и по ЭДС
 ,
( 4.2 )
,
( 4.2 )
где

 –
соответственно длительный момент и
соответствующий ему ток двигателя.
–
соответственно длительный момент и
соответствующий ему ток двигателя.
Определим значение конструктивного коэффициента вентильного двигателя Д1
 Нм/А;
Нм/А;
Определим значение конструктивного коэффициента вентильного двигателя Д2
 Нм/А;
Нм/А;
Определим значение максимального напряжения преобразователя для вентильного двигателя Д1
 ;
;
Определим значение максимального напряжения преобразователя для вентильного двигателя Д2
 ;
;
Длительный выпрямленный ток преобразователя:
 ,
( 4.3 )
,
( 4.3 )
где
 – эквивалентный момент на валу двигателя
за цикл работы;
– эквивалентный момент на валу двигателя
за цикл работы;
Определим значение длительного выпрямленного тока преобразователя для вентильного двигателя Д1
 ;
;
 ;
;
Ток перегрузки должен удовлетворять соотношению
 ,
,
где
 – ток, соответствующий максимальному
моменту двигателя;
– ток, соответствующий максимальному
моменту двигателя;
 ;
;
 ;
;
Окончательно получаем:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
4.2. Выбор комплектных электроприводов серии эпб-2
Для выбранных вентильных двигателей выбираем комплектные электроприводы серии ЭПБ-2
Для первого звена:
Блок питания серии БС 9803-355
 ;
;
 ;
;
 ;
;
Блок регулирования серии БС 4102-345
 ;
;
;
;
;
;
Для второго звена:
Блок питания серии БС 9803-355
; ; ;
Блок регулирования серии БС 4102-345
; ; ;
Структурная схема двухконтурной СУЭП на базе ЭПБ-2 приведена на рис. 4.1.
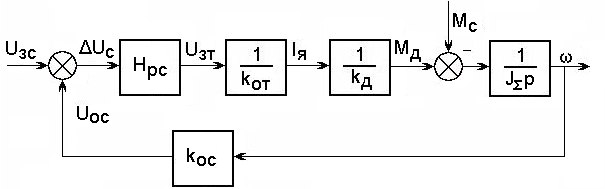
Рис. 4.1. Структурная схема двухконтурной СУЭП на базе ЭПБ-2
4.3. Синтез параметрів суэп для 1-ї ланки маніпулятора
Визначаємо максимальну кутову швидкість валу двигуна:

де nmax= об/хв. – максимальна частота обертання вала

Визначаємо значення конструктивного коефіцієнту за ЄРС:


Визначаємо коефіцієнт датчика швидкості:

Визначаємо коефіцієнт датчика струму:

Визначаємо конструкційний коефіцієнт двигуна:


Визначаємо сумарний момент інерції:

 кгм2
кгм2
Обираємо
 :
:





4.4. Синтез параметрів суэп для 2-ї ланки маніпулятора
Визначаємо максимальну кутову швидкість валу двигуна:
де nmax= об/хв. – максимальна частота обертання вала
Визначаємо значення конструктивного коефіцієнту за ЄРС:


Визначаємо коефіцієнт датчика швидкості:

Визначаємо коефіцієнт датчика струму:

Визначаємо конструкційний коефіцієнт двигуна:


Визначаємо сумарний момент інерції:

 кгм2
кгм2
Обираємо :




