

46. Регулировка частоты вращения ад путем изменения числа пар полюсов.
Этот способ регулирования частоты вращения дает ступенчатую регулировку. Так, при f1 = 50 Гц и р = 1/5 пар полюсов можно следующие синхронные частоты вращения: 3000, 1500, 1000, 750, 600, об/мин.
Изменять число полюсов в обмотке статора можно либо укладкой на статоре двух обмоток с разным числом пар полюсов, либо укладкой на статоре одной обмотки, конструкция которой позволяет путем переключения катушечных групп получать различное число полюсов. Последний способ получил наибольшее применение.
Возможны два режима работы асинхронных двигателей с полюсно переключаемыми обмотками:
Режим постоянного момента- при переключении двигателя с одной частоты вращения на другую вращающий момент на валу двигателя М2 остается неизменным, а мощность Р2 изменяется пропорционально частоте вращения n2: Р2= 0,105 * M2*n2.
Режим постоянной мощности – при переключении двигателя с одной частоты вращения на другую, мощность Р2 остается примерно одинаково, а момент на валу М2 изменяется соответственно изменению частоты вращения n2: М2= 9.55*Р2/n2
47. Регулирование частоты вращения ад путем изменения частоты.
Этот способ регулирования основан на изменении синхронной частоты вращения n1=f160/p. Для осуществления этого способа регулирования необходим источник питания двигателя переменным током с регулируемой частотой. В качестве таких источников могут применяться электронные, полупроводниковые преобразователи частоты. Что бы регулировать частоту вращения необходимо изменить частоту тока, но при этом изменится и максимальный момент. Поэтому для сохранения неизменными перегрузочной способности, коэффициента мощности и КПД двигателя на требуемом уровне необходимо одновременно с изменением частоты f1 изменять и напряжение питания U1.
48.
49. Точной синхронизацией называется включение возбужденного генератора в сеть при условии равенства его частоты и напряжения частоте и напряжению сети. Способ точной синхронизации пригоден для всех синхронных генераторов, приводимых во вращение первичным двигателем того или иного типа, а также для синхронных двигателей и синхронных компенсаторов в тех случаях, когда они снабжены дополнительным разгонным двигателем, с помощью которого частота вращения может быть доведена до синхронной. При точной синхронизации генератор включается в сеть возбужденным. Достоинством точной синхронизации является отсутствие больших толчков тока и длительных качаний ротора при включении генератора в сеть.
50. Частоту обертання асинхронних двигунів з фазовими роторами регулюють зміною опору ротора двигуна, для чого включають або вимикають пускові резистори. Включення в ланцюг ротора пусковогорезистора зменшує частоту обертання ротора, вимикання резистора збільшує її. Шунтування (виведення з ланцюга) частини резистора виробляють за допомогою контролера.
51. Для прискорення процесу включення генератора в мережу застосовують спосіб грубої синхронізації або самосинхронізації, адже, автоматичні пристрої не завжди можуть швидко включити генератор в мережу, особливо в разі будь-якої аварії в мережі, коли її напруга і частота змінюються.
52. Нині широко застосовуються однофазние асинхронні двигуни, які є основними у мережі однофазного змінного струму. Статор такого двигуна має 2 обмотки – роботу і пускову (допоміжну). Обидві обмотки розміщені в пазах сердечника тож їхні осі зміщено просторово навкруг статора на 90. Ротор має1-укороткозамкнутую обмотку. Він ротора однофазного двигуна таку ж, як в трехфазного (див. примітка.). Двигуни, випущені промисловістю, має малу потужність: від 1 Вт (серіяУАД) до 400 Вт (серіяАВЕ) і навіть 600 Вт (серіяАОЛБ). Однофазние асинхронні двигуни застосовують у схемах автоматичного управління, в різноманітних побутових пристроях, в приводах механізмів малої потужності.
53. Правильно організувати робочі місця, забезпечити всіх працюючих спецодягом і необхідними індивідуальними захисними засобами - одна з головних обов'язків адміністрації судна. Раціональна планування робочого місця передбачає передусім встановлення зручних і безпечних зон для виконання трудових операцій і відповідне розміщення всього необхідного для роботи обладнання. Важлива роль в організації робочих місць відводиться забезпечення працюючих справним інструментом і пристосуваннями.
54. Асинхронний двигун забезпечує наступні режими гальмування:
Рекуперативне (генераторне) гальмування;
Гальмування противмиканням;
Динамічне гальмування;
Гальмування із самозбудженням.
Ознакою переходу в режим рекуперативного гальмування є більша за синхронну швидкість двигуна. Цей режим можна реалізувати в статичному режимі чи в перехідному процесі.
Гальмування противмиканням у статичному режимі можна отримати тільки при активному статичному моменті для двигуна з фазним ротором. Для цього достатньо увімкнути в коло ротора додатковий резистор Rд із таким опором, щоб робоча точка перемістилася з першого в четвертий квадрант. Величина опору визначає швидкість w2 , з якою буде обертатися двигун в режимі гальмування противмиканням.
Для організації режиму динамічного гальмування потрібно джерело постійного струму. Обмотка статора працюючого двигуна відключається від мережі змінного струму і переключається на джерело постійного струму
Гальмування із самозбудженням застосовується достатньо рідко. Воно основується на тому, що після відмикання двигуна від мережі магнітне поле в ньому затухає не миттєво. Це й використовується для створення гальмувального моменту.
55. Для устойчивой и надежной параллельной работы генераторов необходимо, чтобы активная мощность, отдаваемая работающими генераторами, распределялась между ними пропорционально их номинальным мощностям, так как в противном случае один из параллельно работающих генераторов окажется недогруженным, а другие перегруженными, что вызовет выход последних из строя или выпадение из синхронизма. Пропорциональное распределение активной мощности между генераторами производится только в том случае, если приводные двигатели имеют одинаковый наклон характеристик, выражающих зависимость частоты вращения дизеля п от активной мощности Р на валу, т. е. одинаковый статизм. При неодинаковом статизме привода и одинаковой частоте вращения параллельно работающих генераторов распределение активной мощности между ними не будет пропорционально их номинальным мощностям, как показано на рис. 3. Чтобы этого не происходило, статизм двигателя заранее регулируют настройкой регулятора подачи топлива.
56. Конденсаторные двигатели — разновидность асинхронных двигателей, в обмотки которого включены конденсаторы для создания сдвига фазы тока. Подключаются в однофазную сеть посредством специальных схем. По количеству фаз статора делятся на двухфазные и трехфазные. Практически единственный способ реализации асинхронного двигателя в обычной бытовой однофазной сети.
57. В первом случае для пропорционального распределения реактивной мощности между генераторами необходимо, чтобы напряжение каждого из генераторов при автономной работе несколько уменьшалось с увеличением реактивной нагрузки, а статизм по реактивной мощности генераторов был одинаков. Статизмом по реактивной мощности называют относительное изменение напряжения генератора при увеличении его реактивной мощности. При неодинаковом статизме по реактивной мощности и одинаковом напряжении параллельно работающих генераторов распределение реактивной мощности между ними будет происходить непропорционально их номинальным мощностям
58. Электронный счетчик импульсов предназначен для подсчета количества импульсов, поступающих с измерительных датчиков на счетные входы (или один счетный вход) счетчика импульсов и пересчета их в требуемые физические единицы измерения. Как правило, в качестве датчика применяется механический прерыватель или индуктивный датчик (бесконтактный датчик) или энкодер.
Кроме того, счётчики импульсов классифицируют по направлению счета (режиму работы):
1)суммирующие счетчики импульсов;
2)вычитающие счетчики импульсов;
3)реверсивные счетчики импульсов.
Импульсы от энкодера с определением направления вращенияРеверсивные счетчики импульсов чаще всего используются при работе с 2-х канальными энкодерами или с двумя индуктивными датчиками, при этом:автоматически счетчиком импульсов определяется направление вращения энкодера;происходит увеличение в 4 раза разрешающей способности энкодера, то есть 1 полный импульс c энкодера счетчик импульсов превращает в 4 инкремента (см. рис. поясняющий работу счетчика импульсов в реверсивном режиме).
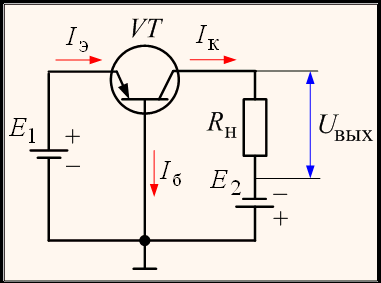
59. 1)Рассмотренный выше пример построения усилителя электрических сигналов с помощью транзистора является схемой включения с общей базой. На рис. 3.5. приведена электрическая принципиальная схема включения транзистора с общей базой.
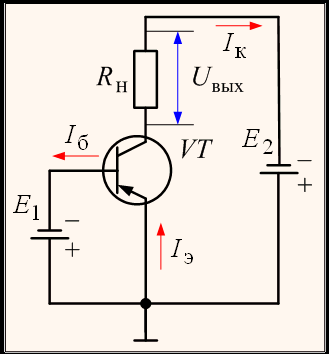
2)Включение транзистора по схеме с общим эмиттером
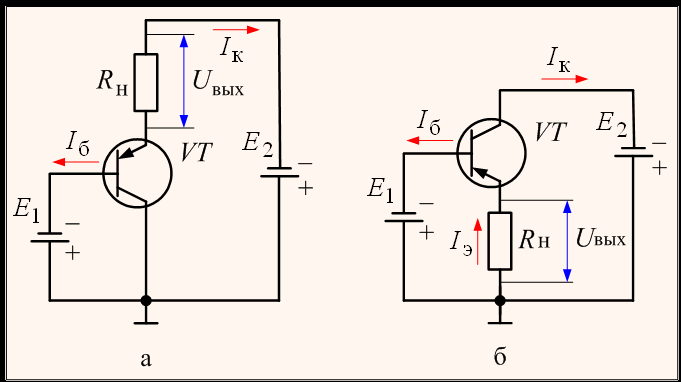
3)Включение транзистора по схеме с общим коллектором
60.
61.
62.
63.
64.
65.
66.
67.
68.
69.
70.