

5.4 Регулювання швидкості обертання ротора асинхронного двигуна
В асинхронному двигуні частота обертання визначається з рівності
![]() . (5.6)
. (5.6)
Із цього виразу виходить, що змінювати n2 можна трьома способами:
– зміною частоти f1 (частоти мережі живлення);
– зміною кількості пар полюсів р;
– зміною ковзання s.
5.4.1 Регулювання зміною частоти (частотне регулювання) Для зміни частоти f1 застосовують машинні або напівпровідникові (тиристорні) перетворювачі (рис. 5.8).
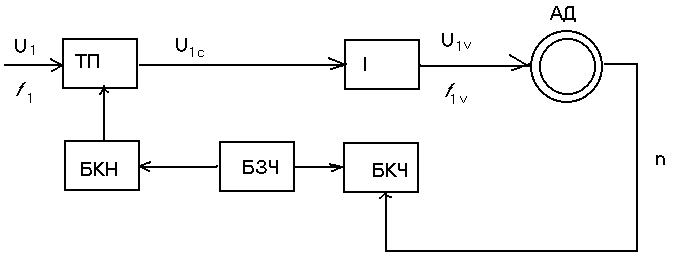

Рисунок 5.8 – Частотне тиристорне регулювання швидкості обертання ротора асинхронного двигуна
ТП – тиристорний перетворювач; І – інвертор; БКН – блок керування напругою; БЗЧ – блок задання частоти; БКЧ – блок керування частотою.
ТП живиться від трифазної мережі при U1 = const; f1 = const. На виході ТП одержують постійну напругу U1c. Ця напруга надходить на інвертор, на виході якого одержують регульовану напругу U1v при частоті f1v. Ця напруга подається на АД.
Для автоматизації процесу регулювання застосовуються БЗЧ, БКН, БКЧ.
5.4.2 Регулювання зміною кількості пар полюсів
Виводи статорної обмотки перемикаються в клемній коробці. Залежно від їх комутації змінюється кількість пар полюсів (р). Цей спосіб дає змогу регулювати оберти ступенево.
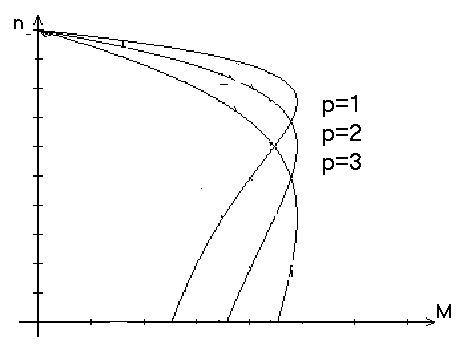
Рисунок 5.9 – Регулювання швидкості обертання ротора
зміною кількості пар полюсів
Цей спосіб регулювання економічний. Робоча частина характе – ристики жорстка, але він застосовується тільки тоді, коли немає жорстких вимог до плавності регулювання (наприклад, насоси, вентилятори і т.ін.).
5.4.3 Регулювання частоти обертання зниженням підведеної напруги (напруги живлення)
При зниженні напруги момент двигуна М зменшується пропорційно U2, у результаті цього змінюються механічні характеристики, зменшується критичний момент Мкрит, при постійному моменті опору Мопору збільшується ковзання та падає частота обертання ротора.
Змінювати напругу U можна вмиканням у коло статора реостатів або автотрансформаторів (рис. 5.10).
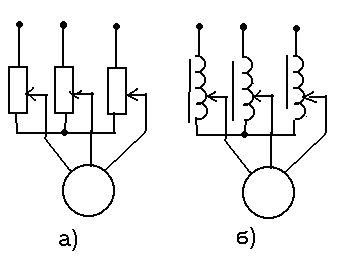
Рисунок 5.10 – Регулювання частоти обертання зниженням напруги живлення
При вмиканні реостатів (рис. 5.10, а) у них утрачається значна активна потужність (R.I2); автотрансформатори дають змогу регулювати частоту обертання вручну (рис. 5.10, б).
Ці способи застосовуються тільки для двигунів малої потужності, тому що знижується ККД, зменшується Мкрит, а діапазон регулювання порівняно незначний.
5.5 Пуск асинхронного двигуна
Застосовуються такі способи пуску:
прямий пуск;
пуск із використанням додаткових опорів;
пуск при зниженій напрузі.
5.5.1 Прямий пуск
При цьому на обмотку статора подається номінальна напруга, схема наведена на рисунку 5.11.
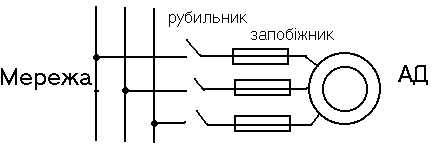
Рисунок 5.11 – Прямий пуск асинхронного двигуна
При вмиканні рубильника ковзання s = 1, а струм у роторі й рівний йому струм статора максимальні. В міру розгону ротора s зменшується, і в кінці пуску струм значно знижується.
У серійних АД при прямому пуску пусковий струм перевищує номінальний у 5 – 7 разів, тобто в мережі живлення виникає стрибок струму. Це може викликати таке значне падіння напруги, що інші двигуни, які живляться від цієї мережі, можуть зупинитися. Відносно невеликий Мпуск може призвести до того, що при пуску АД під навантаженням він не зможе подолати момент опору і не зрушить із місця.
Через це прямий пуск можливо застосовувати тільки для АД потужністю до 50 кВт.