

7 Контроллер системной шины вг 88. Назначение. Функционирование
Контроллер системной шины К1810ТВГ88 предназначен для работы в составе микропроцессорной системы на базе МП K1810BM86. В зависимости от состояния МП контроллер управляет обменом данными между локальной шиной (ЛШ) процессора и системной шиной (СШ) при наличии доступа к управлению шинами МП, а также между локальной шиной и шиной ввода - вывода или резидентной шиной. Контроллер шины (КШ) синхронизируется тактовым генератором МП и осуществляет управление шинными формирователями, регистрами, фиксаторами адреса, устройствами ввода - вывода и памятью. Структурная схема контроллера шины приведена на рис. 48, а его условное графическое обозначение - на рис. 49.
Рисунок 48 - Структура контроллера системной шины ВГ88

Рисунок 49 - Условное графическое изображение ИС ВГВ8
Назначение выводов
, , - входы сигналов состояния МП ВМ86/ВМ87/ВМ89.
Контроллер шины декодирует эти сигналы и формирует командные сигналы и сигналы управления.
CLK - входные сигналы генератора тактовых импульсов ГФ84, синхронизирующие работу контроллера шины.
![]() -
сигнал управления выдачей командных
сигналов контроллера, которая
осуществляется через 115 нс после
поступления сигнала
.
В режиме работы с шиной ввода - вывода
(IOВ
= 1) сигнал
не влияет на выдачу командных сигналов,
управляющих вводом - выводом.
-
сигнал управления выдачей командных
сигналов контроллера, которая
осуществляется через 115 нс после
поступления сигнала
.
В режиме работы с шиной ввода - вывода
(IOВ
= 1) сигнал
не влияет на выдачу командных сигналов,
управляющих вводом - выводом.
CEN
- сигнал управления выдачей командных
сигналов и сигналов управления DEN
и
![]() .
При CEN
= 0 выходные командные сигналы находятся
в пассивном состоянии (сигнал высокого
уровня).
.
При CEN
= 0 выходные командные сигналы находятся
в пассивном состоянии (сигнал высокого
уровня).
IOВ - сигнал управления режимом работы контроллера. При IOB = 1 задается режим работы с шиной ввода - вывода, а при IOВ = 0 - с системной шиной.
![]() -
сигнал чтения из памяти. Разрешает
выставить информацию на шину данных из
ячейки, адрес которой установлен на
шине адреса.
-
сигнал чтения из памяти. Разрешает
выставить информацию на шину данных из
ячейки, адрес которой установлен на
шине адреса.
![]() -
командный сигнал записи в память.
Разрешает записать информацию с шины
данных по адресу, установленному на
шине адреса.
-
командный сигнал записи в память.
Разрешает записать информацию с шины
данных по адресу, установленному на
шине адреса.
![]() -
опережающий командный сигнал записи в
память. Указывает о начале машинного
цикла записи и позволяет своевременно
подготовиться к записи информации.
-
опережающий командный сигнал записи в
память. Указывает о начале машинного
цикла записи и позволяет своевременно
подготовиться к записи информации.
![]() -
командный сигнал ввода из УВВ. Разрешает
УВВ, адрес которого установлен на шине
адреса, выставить информацию на шину
данных.
-
командный сигнал ввода из УВВ. Разрешает
УВВ, адрес которого установлен на шине
адреса, выставить информацию на шину
данных.
![]() -
командный сигнал вывода в УВВ. Разрешает
УВВ, адрес которого установлен на шине
адреса, считать информацию с шины данных.
-
командный сигнал вывода в УВВ. Разрешает
УВВ, адрес которого установлен на шине
адреса, считать информацию с шины данных.
![]() -
опережающий командный сигнал вывода в
УВВ. Указывает УВВ о начале машинного
цикла вывода и позволяет ему своевременно
подготовиться к выводу информации.
-
опережающий командный сигнал вывода в
УВВ. Указывает УВВ о начале машинного
цикла вывода и позволяет ему своевременно
подготовиться к выводу информации.
![]() -
сигнал управления работой шинных
формирователей.
= 1 переключает шинные формирователи на
передачу данных с локальной шины на
шину ввода - вывода или системную шину,
= 0 переключает шинные формирователи на
считывание данных с шины ввода - вывода
или системной шины на локальную.
-
сигнал управления работой шинных
формирователей.
= 1 переключает шинные формирователи на
передачу данных с локальной шины на
шину ввода - вывода или системную шину,
= 0 переключает шинные формирователи на
считывание данных с шины ввода - вывода
или системной шины на локальную.
DEN - сигнал управления состоянием»включено» шинных формирователей, включенных между локальной и системной или резидентной шиной.
MCE/PDEN - сигнал управления выполняет две функции в зависимости от режима. В режиме работы с шиной ввода - вывода (IOВ = 1) используется сигнал PDEN управления состоянием»включено» шинных формирователей, включенных между локальной шиной и шиной ввода - вывода. В режиме работы с системной шиной (IOВ = 0) используется сигнал МСЕ управления считыванием номера ведомого контроллера прерываний, подлежащего обслуживанию.
ALE - сигнал управления моментом стробирования (фиксации) адреса в адресном регистре с локальной шины МП. Запись адреса осуществляется в момент перехода сигнала ALE с высокого уровня на низкий.
Функционирование. Основной информацией для формирования командных сигналов и сигналов управления контроллером системной шины является код состояния МП, поступающий на входы , , . Дешифратор состояния МП производит декодирование поступившего кода в соответствии с табл. 18.
Таблица 18
Код состояния МП
|
Состояние МП BM86 |
Командный сигнал контроллера ВГ88 |
000 |
Подтверждение прерывания |
|
001 |
Ввод из УВВ |
|
010 |
Вывод из УБВ |
|
011 |
Останов |
- |
100 |
Выборка команды |
|
101 |
Чтение из памяти |
|
110 |
Запись в память |
|
111 |
Пассивное |
|
Выходные командные сигналы и сигналы управления вырабатываются контроллером под управлением входных сигналов IOВ, CEN и , определяющих режим работы контроллера, активность командных сигналов и возможность доступа к системной шине. Контроллер работает в двух режимах: с системной шиной и с шиной ввода - вывода.
Режим
работы с системной шиной устанавливается
путем подачи на вход IOВ
напряжения низкого уровня (IOВ
= 0). В этом режиме КШ формирует командные
сигналы и сигналы ALE,
DEN,
управления фиксаторами адреса и шинными
формирователями. В однопроцессорных
системах, использующих МП ВМ86 в
максимальном режиме, типовая схема
включения КШ ВГ88 представлена на рис.
50. На входах формируются постоянные
значения
= 0 и CEN
= 1, разрешающие выдачу командных сигналов
и сигналов управления. На выходе
![]() при таком включении формируется сигнал
МСЕ, который используется в системах с
каскадированием контроллеров прерывания
для определения момента передачи номера
ведомого контроллера, запрашивающего
прерывание. Сигнал ALE
служит для определения момента фиксации
адреса, установленного на ЛШ в фиксаторах
ИР81. Выходные сигналы
и DEN
используются для управления работой
шинных формирователей. Сигнал DEN
имеет высокий активный уровень, поэтому
его следует инвертировать перед
подачей на вход
при таком включении формируется сигнал
МСЕ, который используется в системах с
каскадированием контроллеров прерывания
для определения момента передачи номера
ведомого контроллера, запрашивающего
прерывание. Сигнал ALE
служит для определения момента фиксации
адреса, установленного на ЛШ в фиксаторах
ИР81. Выходные сигналы
и DEN
используются для управления работой
шинных формирователей. Сигнал DEN
имеет высокий активный уровень, поэтому
его следует инвертировать перед
подачей на вход
![]() шинных формирователей. На схеме рис. 49
сигнал DEN
используется совместно с выходным
сигналом
шинных формирователей. На схеме рис. 49
сигнал DEN
используется совместно с выходным
сигналом
![]() контроллера прерываний, который запрещает
работу шинных формирователей, когда
данные передаются из контроллера
прерываний в МП.
контроллера прерываний, который запрещает
работу шинных формирователей, когда
данные передаются из контроллера
прерываний в МП.
Режим работы с СШ применяется в многопроцессорных системах, когда несколько МП требуют доступа к устройствам ввода - вывода и памяти, подключенных к системной шине. В этом случае каждый МП обслуживается своим контроллером и доступ к СШ имеет тот из них, контроллер которого получает сигнал разрешения доступа от арбитра шин (рис. 51). В случае предоставления доступа к СШ микропроцессору контроллер шины формирует командные сигналы по истечении 115 не после поступления сигнала , а также сигналы ALE, DEN, управления фиксаторами адреса и шинными формирователями.

Рисунок 50 - Типовая схема подключения ВГ88 к ЦП
Наряду с входом для управления выдачей командных сигналов, а также сигналов управления используется вход СЕN. Обычно он применяется в тех случаях, когда МП имеет доступ к двум шинам: системной и резидентной, причем каждой из них соответствует свое адресное пространство. Для формирования сигнала CEN в таких случаях используется дешифратор адресов, разделяющих адресное пространство между СШ и РШ, выход этого дешифратора (прямой и инверсный) служит в качестве сигнала CEN. Описанное включение КШ представлено на рис. 63.
Режим работы с шиной ввода - вывода устанавливается путем формирования сигнала IOВ = 1. Этот режим используется в тех случаях, когда контроллер управляет доступом к двум шинам: резидентной шине ввода - вывода и системной шине. Командные сигналы , , и в этом режиме всегда разрешены, т.е. их появление не зависит от входного сигнала . Как только микропроцессор начинает выполнять команду ввода - вывода, формируется соответствующий командный сигнал, а также сигналы и управления моментом и направлением передачи данных по резидентной шине ввода - вывода. Системная шина в этом случае может работать только с памятью (или с устройствами ввода - вывода, отображенными на память), и МП получает доступ к СШ только по сигналу от арбитра шин.
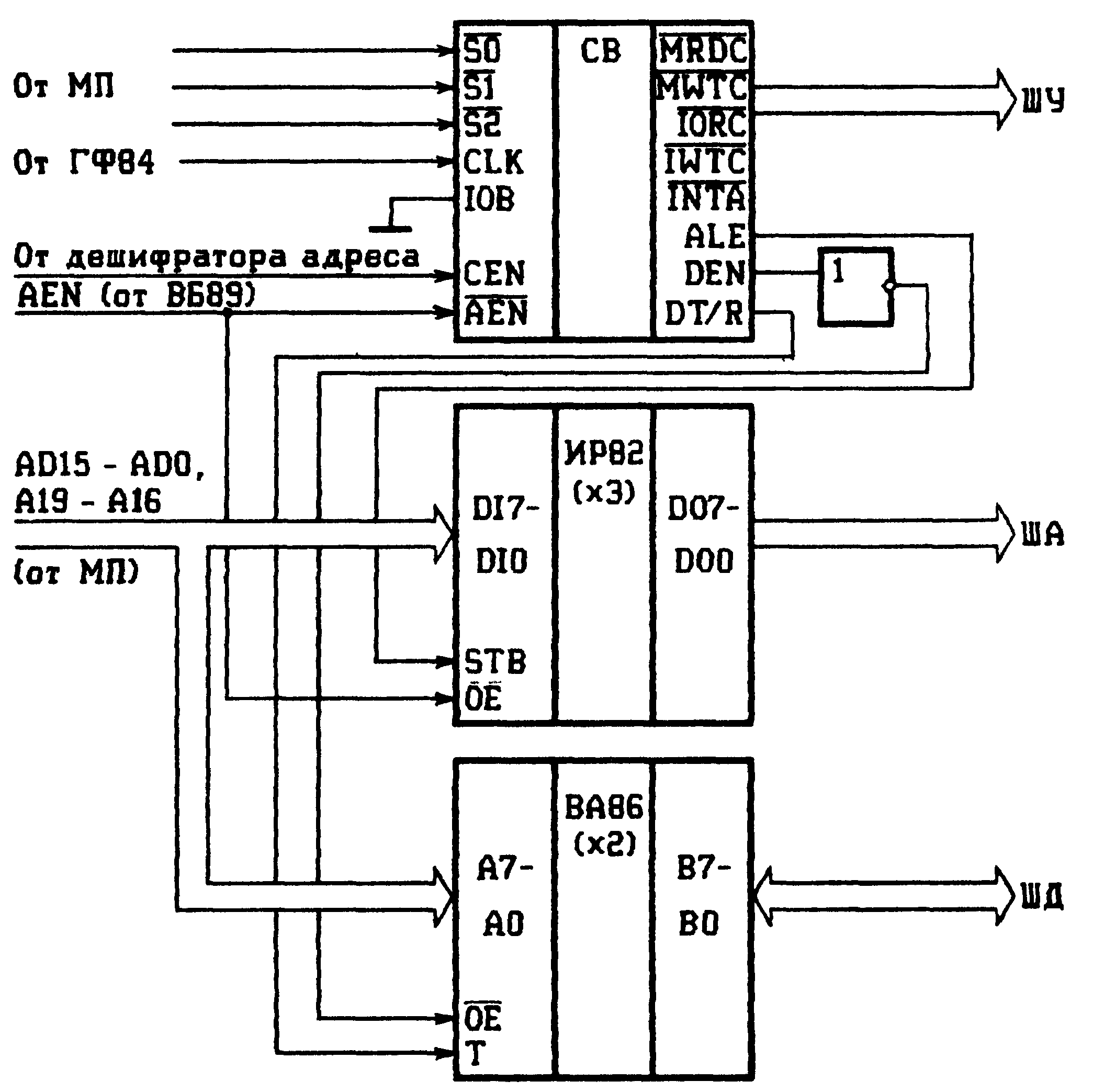
Рисунок 51 - Схема включения ВГ88 в режиме системной шины
Командные
сигналы
,
,
и
для работы с СШ не используются. В
соответствии с выполняемой микропроцессором
командой, требующей обращения к
памяти, контроллер формирует нужный
командный сигнал
или
,
![]() ,
а также сигналы управления моментами
фиксации адреса ALE,
передачи данных DEN
и игнорированием передачи данных по
системной шине
.
Особенности включения системного
контроллера, а также использования
командных сигналов и сигналов управления
в этом режиме иллюстрирует рис. 60.
,
а также сигналы управления моментами
фиксации адреса ALE,
передачи данных DEN
и игнорированием передачи данных по
системной шине
.
Особенности включения системного
контроллера, а также использования
командных сигналов и сигналов управления
в этом режиме иллюстрирует рис. 60.
Выходной сигнал МСЕ совместно с сигналом INTA используется в цикле подтверждения прерывания в системах с каскадированными контроллерами прерываний. Сигнал МСЕ формируется в режиме работы с системной шиной (IOВ≠0). Когда МП отвечает на запрос прерывания, он выставляет код состояния = 000, по которому системный контроллер формирует два отрицательных импульса на выходе INTA. В ответ на первый импульс по ША и ШД не передается никакой информации. Перед началом второго импульса сигнал МСЕ заставляет ведущий контроллер прерываний выдать на ЛШ процессора код ведомого контроллера, запросившего прерывание. Этот код по сигналу ALE записывается в фиксатор адреса. По фронту второго импульса INTA ведомый контроллер, запросивший прерывание, выставляет вектор прерывания на системную шину данных, откуда он считывается ЦП.
В системах, использующих один контроллер прерываний, сигнал МСЕ не используется. В этом случае контроллер прерываний по второму импульсу INTA выставляет вектор на ЛШ процессора.
Выходной сигнал ALE формируется в каждом машинном цикле и служит для записи текущего адреса в фиксаторы адреса. Этот сигнал используется также для фиксации кода состояния МП в фиксаторах для распознавания состояния останова, а также кода ведомого контроллера прерываний в системах с программируемым контроллером прерываний.
Входной сигнал управления CEN действует как определитель возможности использования командных сигналов, формируемых контроллером системной шины. При CEN = 1 КШ функционирует нормально, а при CEN = 0 все командные сигналы удерживаются в неактивном состоянии. Эти особенности используются для разделения адресного пространства и устранения адресных»конфликтов» между внешними устройствами, подключенными к системной и резидентной шине.
На рис. 52 приведены временные диаграммы работы КШ при активных
сигналах на входах , CEN. Для систем, использующих сигналы и CEN для управления выдачей командных сигналов, временные соотношения приведены на рис. 53.
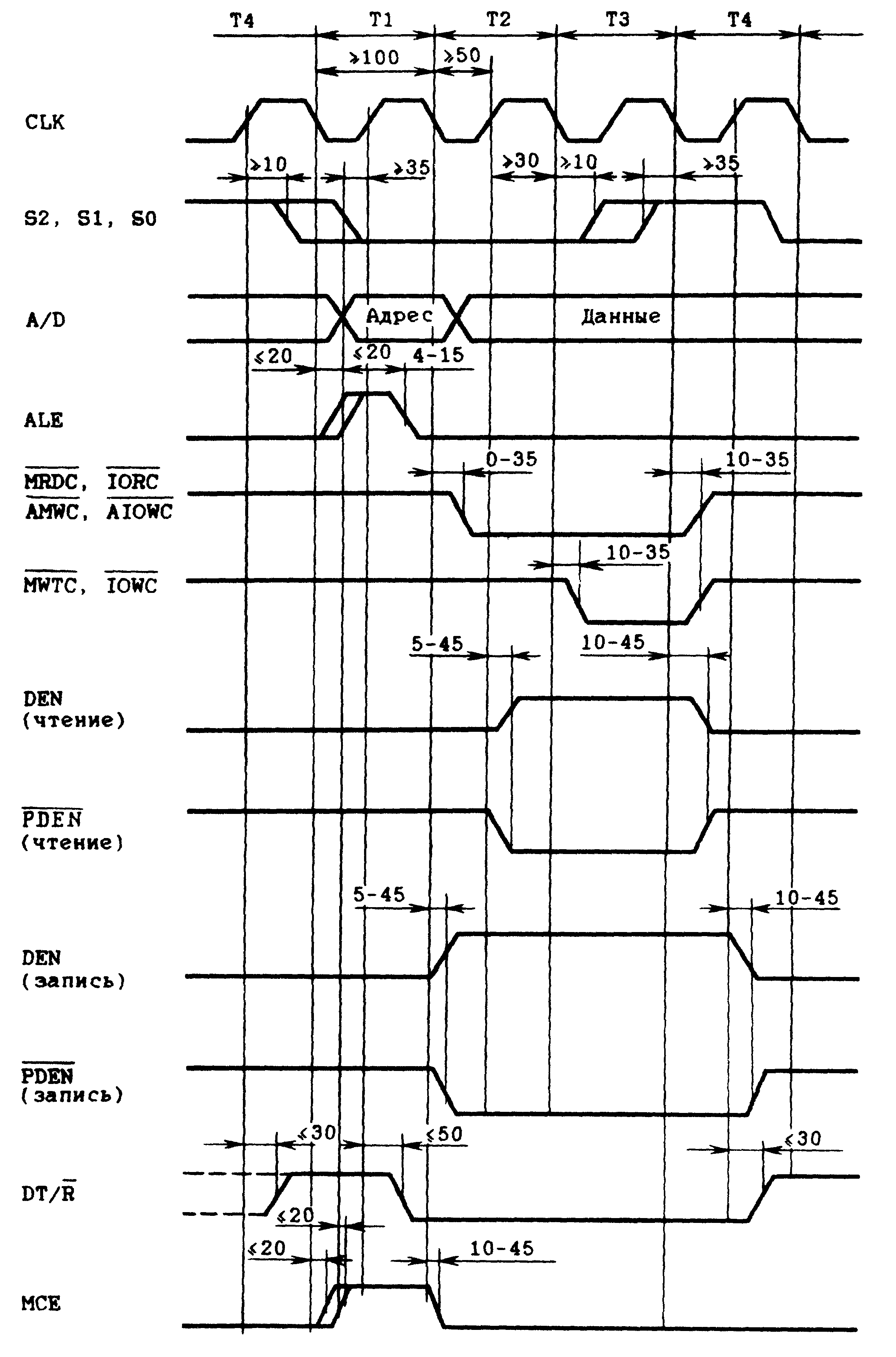
Рисунок 52 - Временные диаграммы работы ВГ88
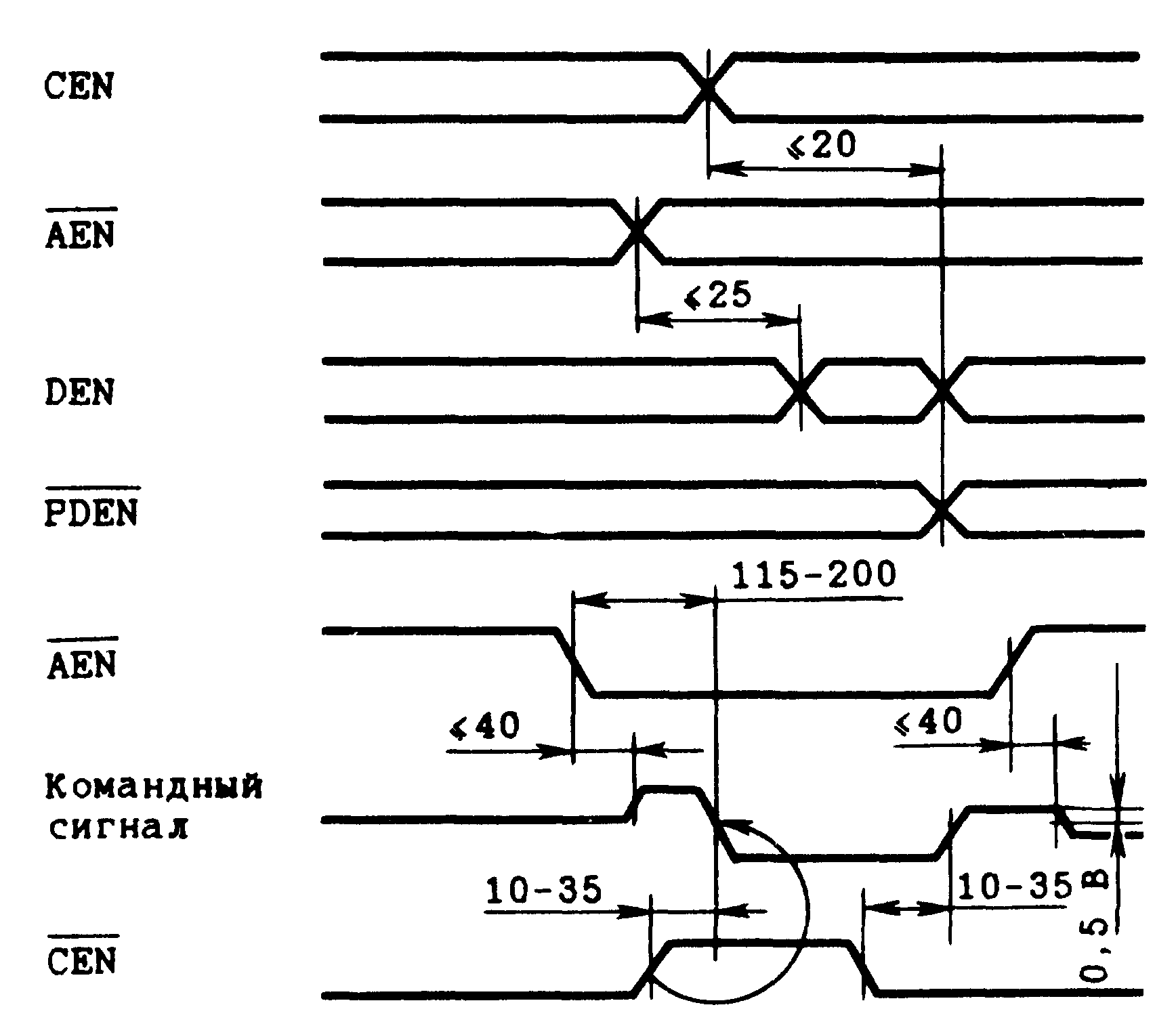
Рисунок 53 - Временные соотношения сигналов ВГ88