

3. Способ диагностики, основанный на совместном анализе кривых мгновенных значений фазных токов и выходного напряжения выпрямителя
При αнорм=6°,αан5=30°
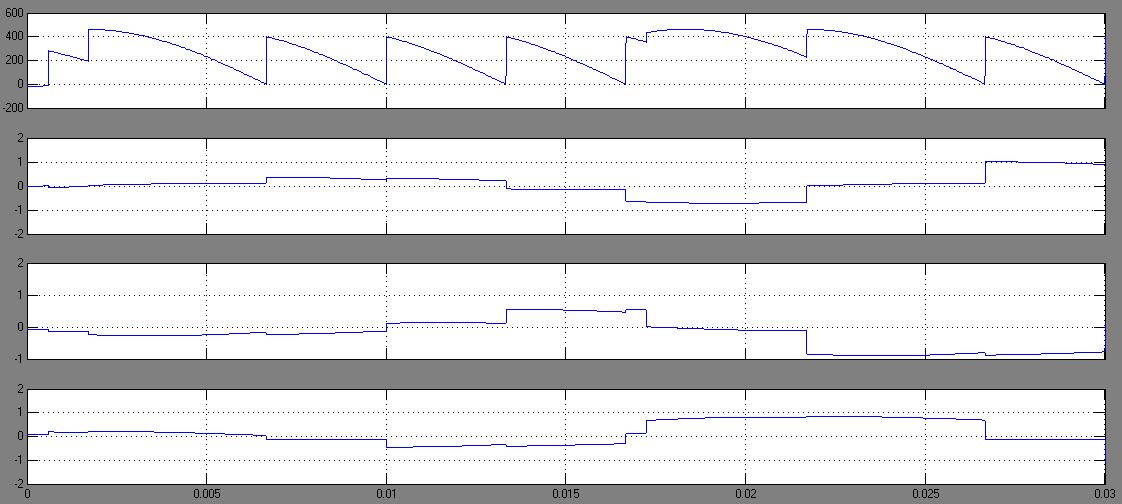
Рис.3.1 Расчетная схема управляемого выпрямителя с активно-индуктивной нагрузкой при αнорм= 6°, αан5=30°.
Uba Uca
t1 t2 t3
T3T6 T5T6
Рис.3.2 Кривые фазных токов и выпрямленного напряжения трехфазного мостового управляемого выпрямителя при работе на активно-индуктивную нагрузку при αнорм= 6°, αан5=30°.
Для определения тиристора с аномальным импульсом, необходимо определение всех линейных напряжений. Их мы определим, как и ранее (см. описание к схеме на рис.2.1). При рассмотрении рис.3.2 видно, что в промежутке времени t1-t2 ток фазы «c» равен нулю, а фазы «a» отрицателен и направлен от a’ к a, ток фаза «b» положителен и направлен от b к b’. При таких направлениях фазных токов, ток выпрямителя может протекать лишь при воздействии линейного напряжения Uba по цепи b – Xγ – b’ – T3 – RL – T6– a’ – Xγ – a через тиристоры Т3 и Т6. При этом в момент t=t2, когда тиристор Т6 вступает в работу мы видим аномальное напряжение Uca. Можно сделать вывод, что тиристор Т5 работает с неправильным углом импульса управления.
Этот способ диагностики так же дает нам полную оценку о работе выпрямителя вплоть до обнаружения неисправного тиристора.
4. Ассиметрия импульсов управления
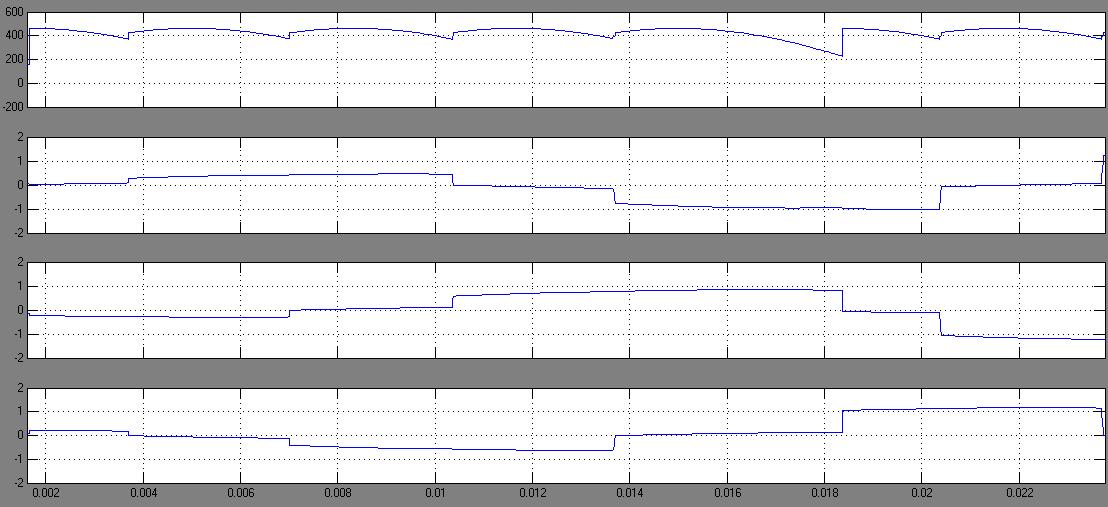
Основываясь на предыдущих способах диагностики рассмотрим работу трехфазного мостового управляемого выпрямителя при ассиметрии импульсов управления (при αнорм=60°, α2=30°, α5=10°).
Ubc Uca Ucb Uab Uac Ubc Uba
Рис.4.1 Кривые фазных токов и выпрямленного напряжения трехфазного мостового управляемого выпрямителя при работе на активно-индуктивную нагрузку при αнорм=60°, α2=30°, α5=10°.
По форме выходного напряжения и фазных токов, а так же по спектрам их гармоник мы можем судить о нарушении работы выпрямителя. В данном примере рассмотрена неправильная работа фазосдвигающего устройства. Мы видим искажение выходного напряжения, и основываясь на выше приведенных примерах можем определить, что на тиристоры Т2 и Т5 подаются аномальные импульсы управления.
II.Исследование трёхфазного управляемого выпрямителя при нагрузке на противо-эдс, при моделировании на двигатель постоянного тока с независимым возбуждением.
Промоделировав трехфазный мостовой выпрямитель при работе на двигатель постоянного тока с независимым возбуждением, можно проанализировать работу якорной цепи этого двигателя. ДПТ в настоящее время всё ещё находят широкое применение. Появление асинхронных и синхронных двигателей не способствовало вытеснению двигателей постоянного тока, т.к. замена всех двигателей требует больших денежных затрат, а так же система управления постоянного гораздо проще, чем у двигателей переменного тока.
Тип и параметры двигателя, выполняющие роль нагрузки, приведены в задании. Чтобы начать моделировать, необходимо рассчитать номинальный ток якоря и величину противо-ЭДС, создаваемую двигателем в номинальном режиме работы, а так же коэффициент трансформации, трансформатора, выполняющего согласование нашего выпрямителя и промышленной сети.
Расчёт напряжения источников питания:



Ua- падение напряжения на тиристорах ( для мостовой схемы 3 В);

 -
амплитуда напряжения в каждой из фаз.
-
амплитуда напряжения в каждой из фаз.
Для согласования управляемого выпрямителя с промышленной сетью (U1m=311B) необходимо между сетью и полупроводниковым преобразователем поставить трансформатор с коэффициентом трансформации
Расчёт номинального тока двигателя и номинальной величины противо-ЭДС.


Перед тем как моделировать, опишем элемент Машина постоянного тока из пакета MatLab 7 (Simulink):
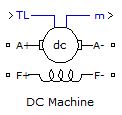
Рис. 5.1 Пиктограмма ДПТ в Mat Lab 7 (Simulink).
Назначение:
Моделирует электрическую машину постоянного тока.
Порты модели А+ и А- являются выводами обмотки якоря машины, а порты F+ и F- представляют собой выводы обмотки возбуждения. Порт ТL предназначен для подачи момента сопротивления движению. На выходе портa m формируется векторный сигнал, состоящий из четырех элементов: частота вращения, ток якоря, ток возбуждения и электромагнитный момент машины.
Пиктограмма блока DС Масhine представлена на рис.5.1.
Цепь якоря машины представлена последовательно включенными элементами: Rа – активное сопротивление якорной цепи, La – индуктивность якорной цепи и Е_FСЕМ – ЭДС обмотки якоря (управляемый источник напряжения). Величина ЭДС обмотки якоря вычисляется по формуле:
Е = КЕ*w,
где Е – ЭДС обмотки якоря; w – частота вращения вала электродвигателя; КЕ –коэффициент пропорциональности между угловой частотой вращения и ЭДС.