

Результаты моделирования в среде MahtLab
В главе Error: Reference source not found показано, что горизонтальные предельные прогибы опор конвейерных галерей от ветровых нагрузок, ограничиваемые исходя из технологических требований, следует принимать равными h/250 (где h - высота опор от верха фундамента до низа ферм или балок), горизонтальные предельные прогибы колонн (стоек) каркасных зданий от температурных климатических и усадочных воздействий следует принимать равными hs/150 ÷ hs/120 в зависимости от материалов (hs – высота этажа, а для одноэтажных зданий с мостовыми кранами - высота от верха фундамента до низа балок кранового пути).
Для моделирования согласно изложенным выше требованиям к строительным сооружениям было принято за основу расчетов, что максимально-типичными размерами для промышленных сооружений будем считать, что высота составляет 25 метров, длина порядка 100 метров. Для модели были взяты следующие значения параметров: расстояние до первого РМ (z0) варьировалось от 10 до 15 метров; длина зоны контроля (L) от 50 до 100 метров, смещения в горизонтальной и вертикальной плоскости от 5 до 25 метров.
Погрешность измерений смещений 0,1-0,2 мм в диапазоне 5 мм для элементов конструкции перекрытий, а для элементов конструкции колонны отклонения составляют максимум 15 мм, погрешность таких измерений не более 0,7 мм.
Исходя из поставленных условий была смоделирована ситуация для определения типичных параметров ИК РОЭС.
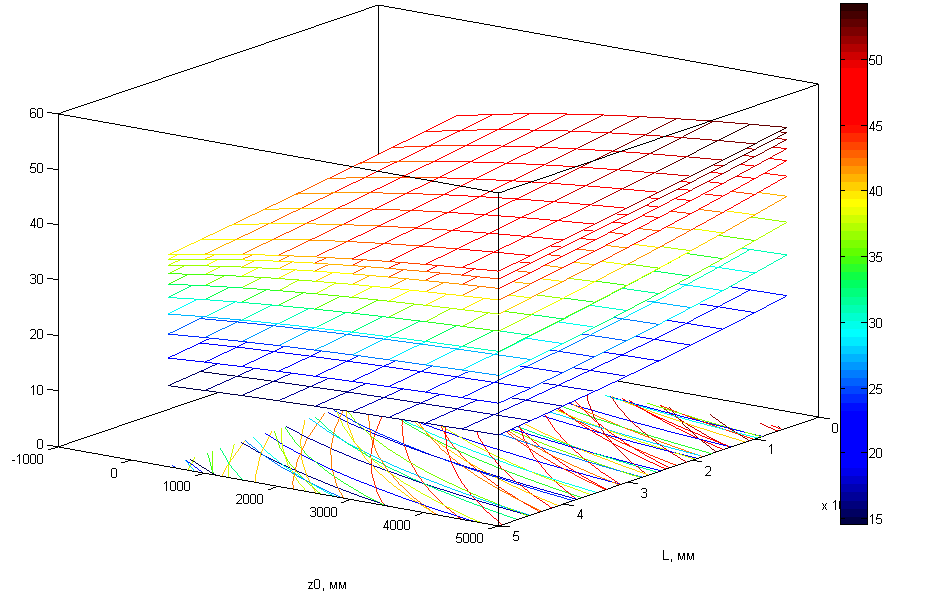
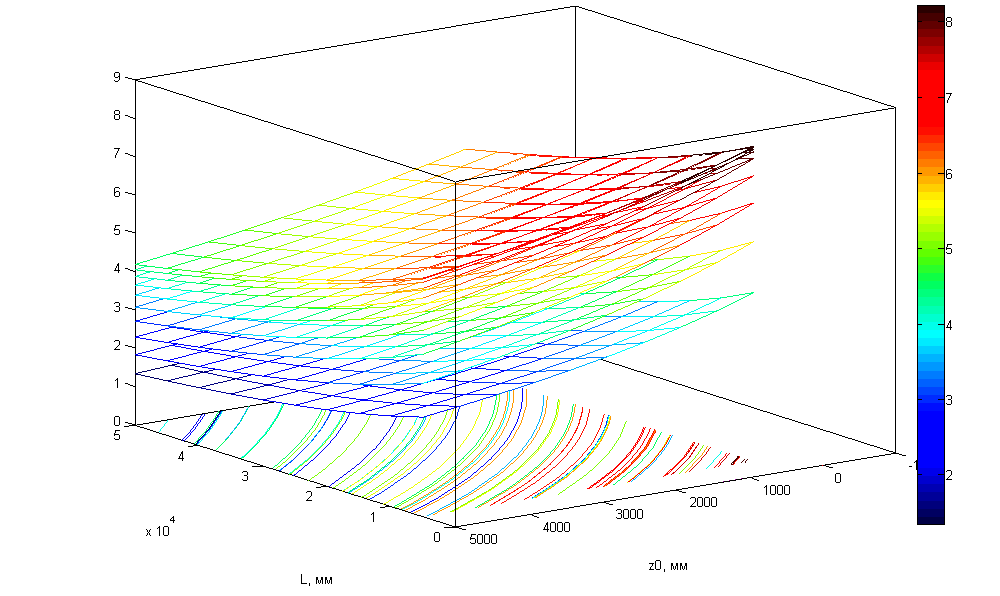
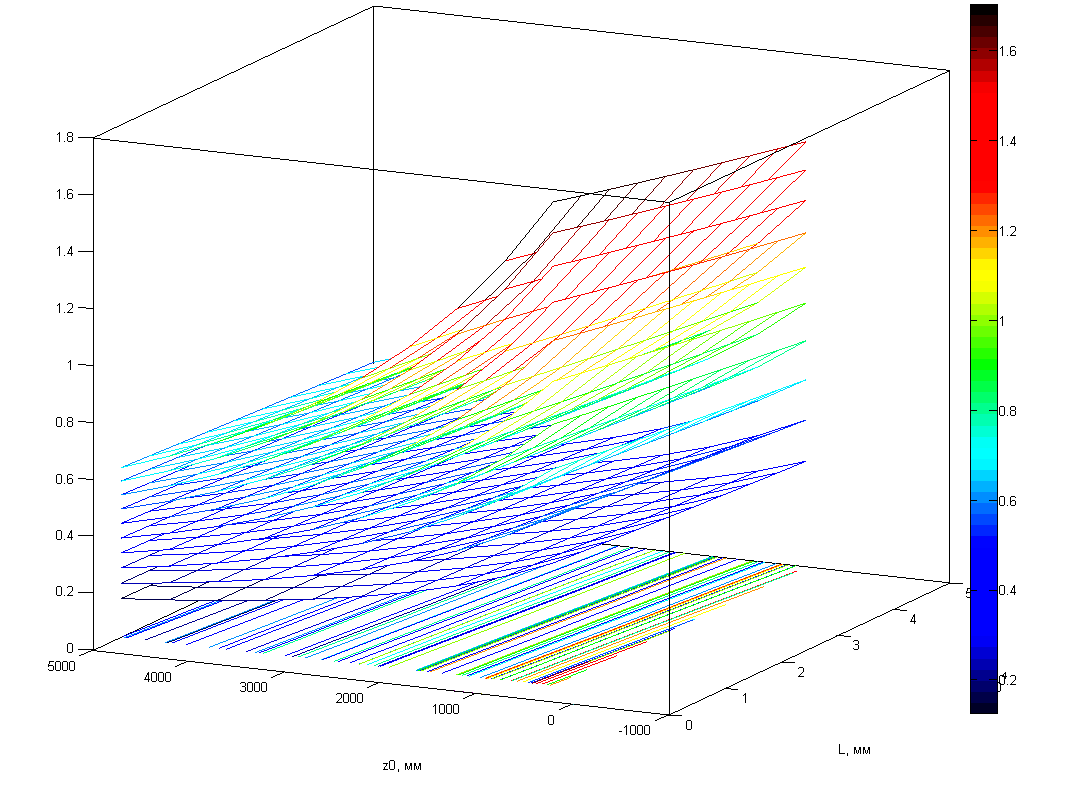
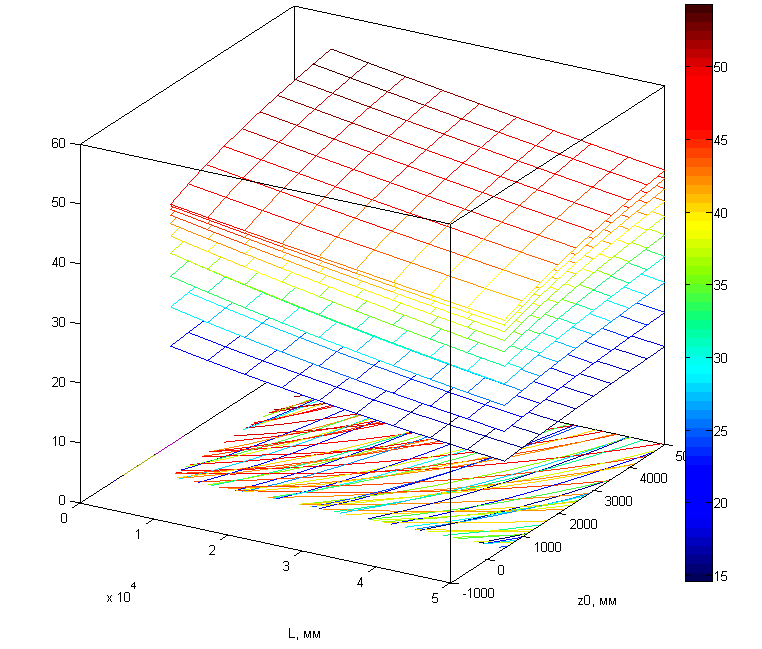
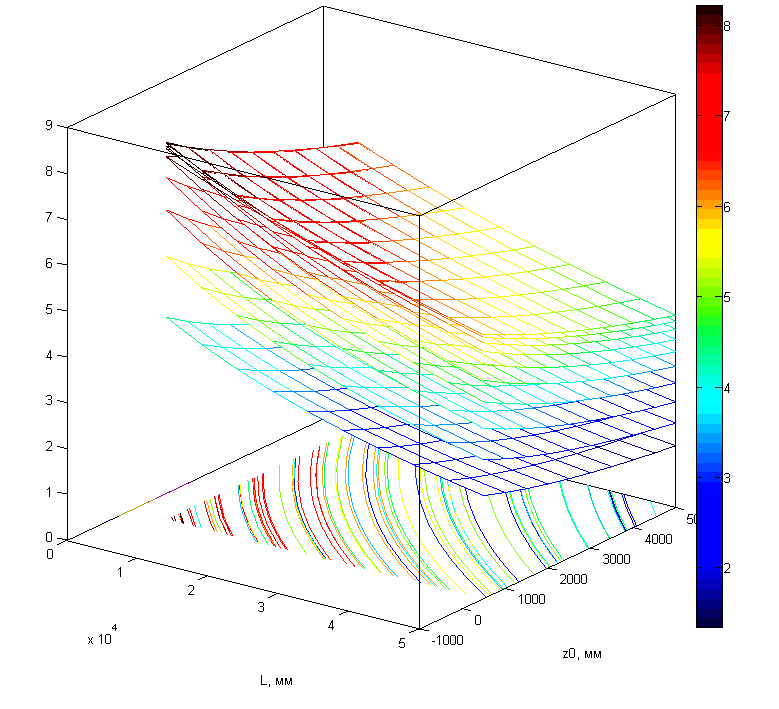
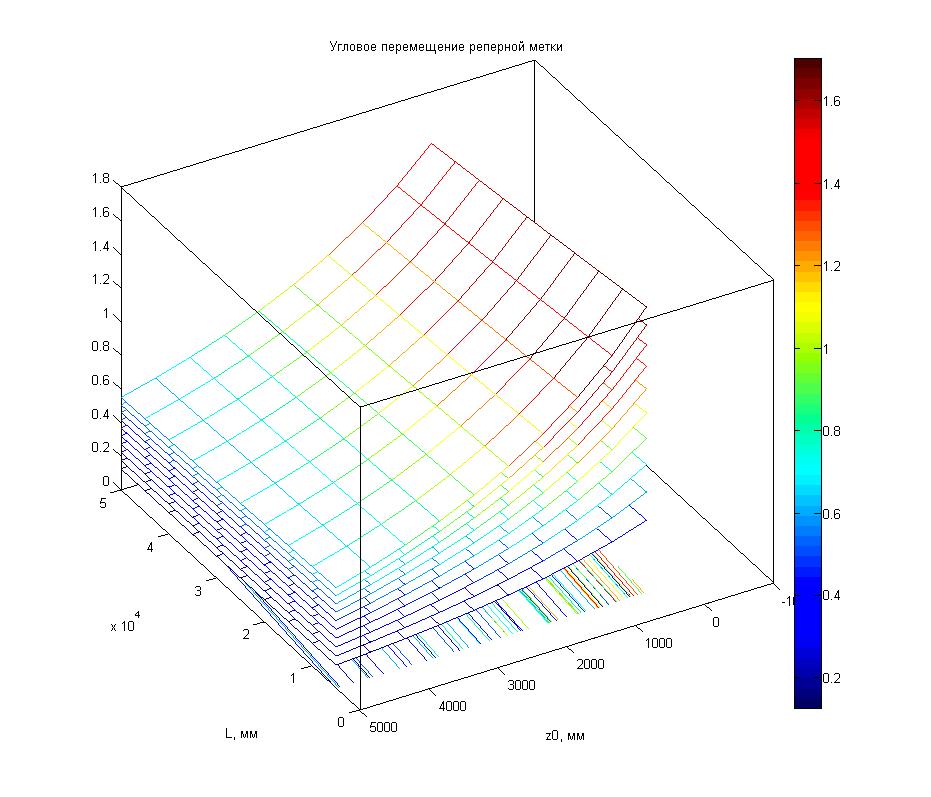
На рисунках 1 .8 – 1 .11 представлены результаты моделирования в среде MathLAB для вариант вертикального смещения фотоприемного модуля.
 Рисунок
Рисунок
y=7м.



y=7м.
y=5м.

 Рисунок
Рисунок
1.9 – Минимальное угловое расстояние между РМ в зависимости от расстояния до первой РМ (z0), длины зоны контроля (L) и изменения высоты плоскости расположения зоны РМ (y).
y=5м.
y=7м.
y=25м.


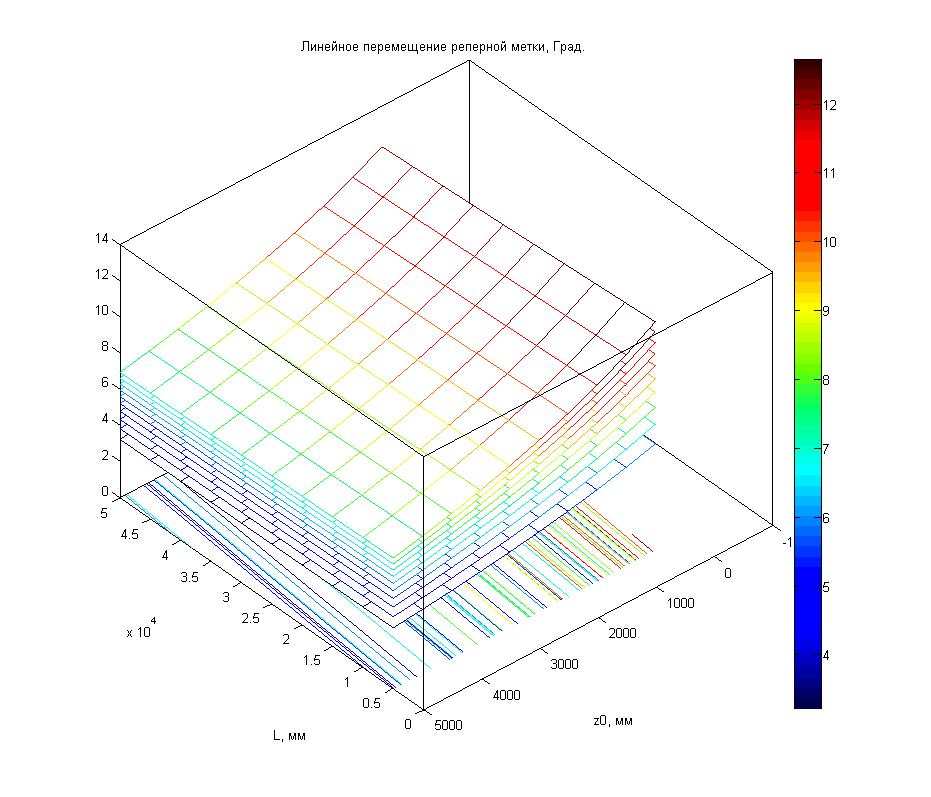
 Рисунок
Рисунок
1.10 – Минимальное линейное перемещение РМ от расстояния до первой РМ (z0), длины зоны контроля (L) и изменения высоты плоскости расположения зоны РМ (y).
y=25м.
y=7м.
y=5м.




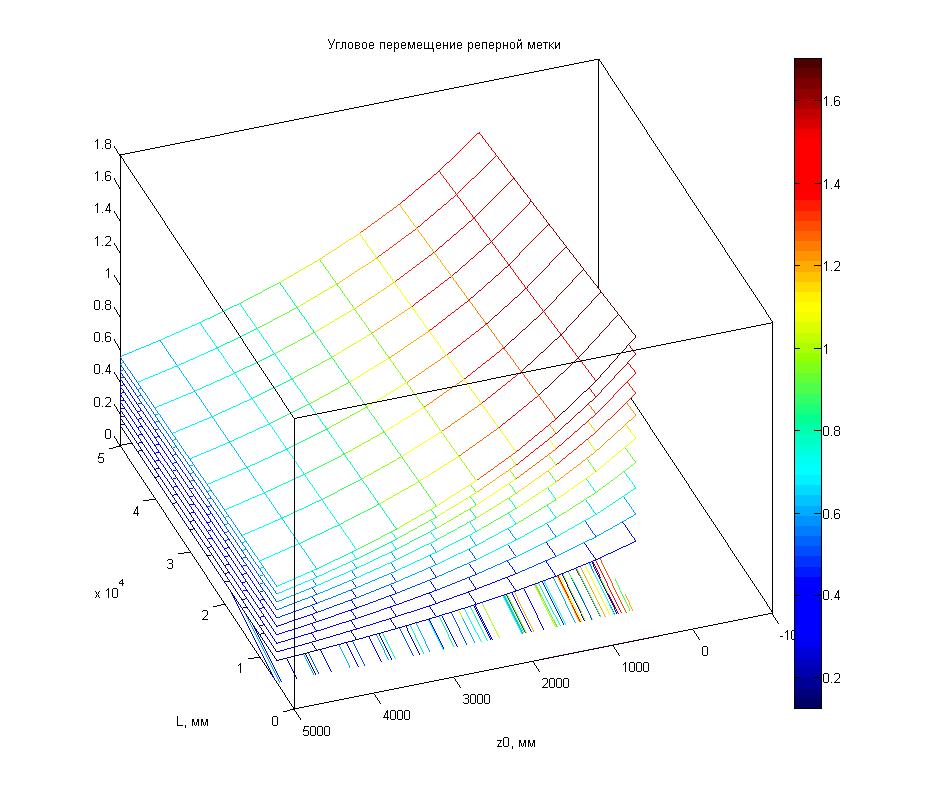
 Рисунок
Рисунок
1.11 – Минимальное угловое перемещение РМ метки в зависимости от расстояния до первой РМ (z0), длины зоны контроля (L) и изменения высоты плоскости расположения зоны РМ (y).
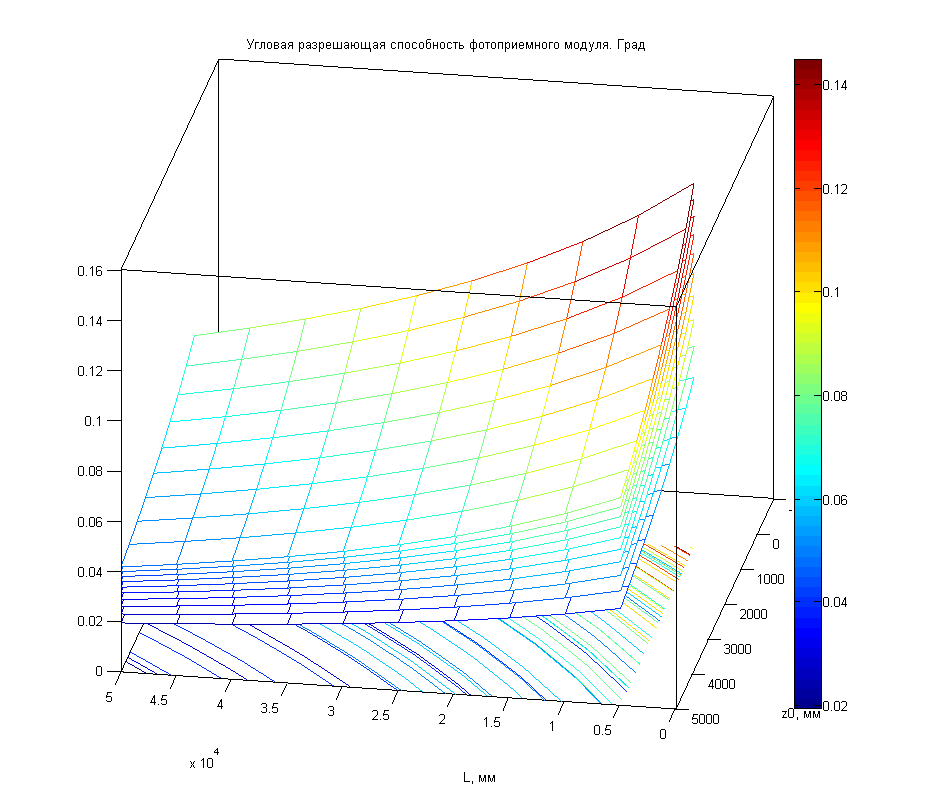
На рисунках 1 .12 – 1 .15 представлены результаты моделирования в среде MathLABдля вариант горизонтального смещения фотоприемного модуля.
y=5м.
y=7м.
y=25м.

 Рисунок
Рисунок
1.12 – Зависимость углового поля зрения объектива фотоприемного модуля от расстояния до первой РМ (z0), длины зоны контроля (L) и горизонтального смещения фотоприемного модуля (y).
y=5м.
y=7м.
y=25м.


 Рисунок
Рисунок
1.13 – Минимальное угловое расстояние между РМ в зависимости от расстояния до первой РМ (z0), длины зоны контроля (L) и изменения высоты плоскости расположения зоны РМ (y).
y=25м.
y=7м.
y=5м. Рисунок
Рисунок
1.14 – Минимальное линейное перемещение РМ от расстояния до первой РМ (z0), длины зоны контроля (L) и изменения высоты плоскости расположения зоны РМ (y).
y=5м.
y=7м.
y=25м.

 Рисунок
Рисунок
1.15 – Минимальное угловое перемещение РМ от расстояния до первой РМ (z0), длины зоны контроля (L) и изменения высоты плоскости расположения зоны РМ (y)
На рисунках 1 .16 – 1 .19 представлены результаты моделирования в среде MathLAB для вариант двухкоординатного смещения фотоприемного модуля (по вертикали и горизонтали).
y=25м.
y=7м.
y=5м.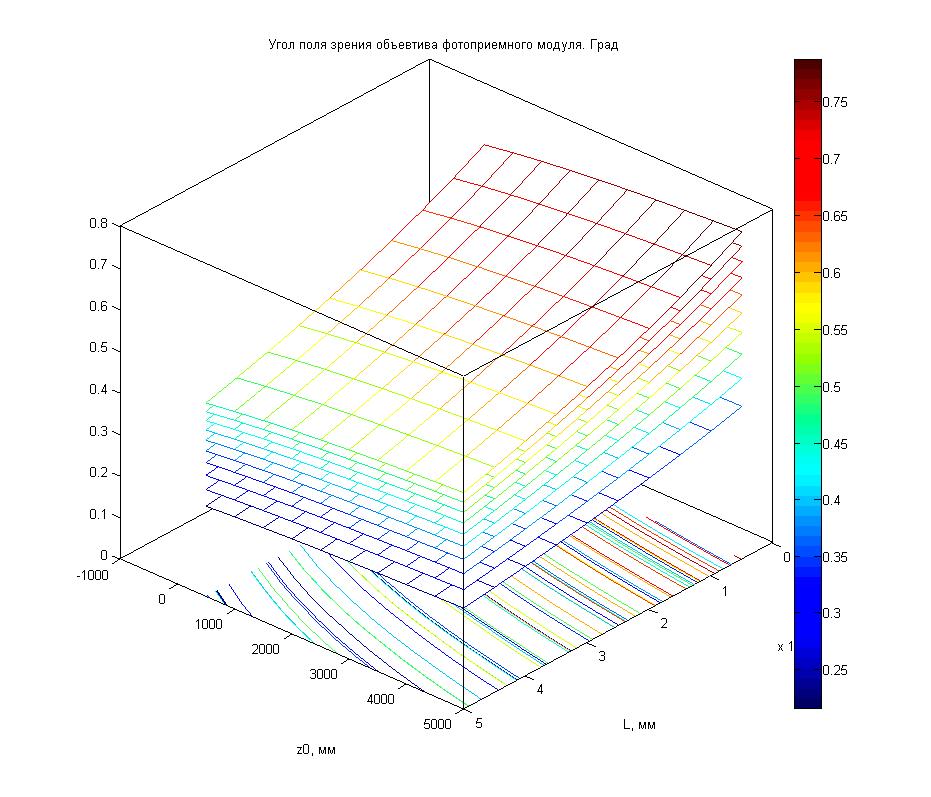 Рисунок
Рисунок
1.16 – Зависимость углового поля зрения объектива фотоприемного модуля от расстояния до первой РМ (z0), длины зоны контроля (L) и горизонтального смещения фотоприемного модуля (y).
y=5м.
y=25м.
y=7м.
 Рисунок
Рисунок
1.17 – Минимальное угловое расстояние между РМ в зависимости от расстояния до первой РМ (z0), длины зоны контроля (L) и изменения высоты плоскости расположения зоны РМ (y).
y=5м.
y=7м.
y=25м.
 Рисунок
Рисунок
1.18 – Минимальное линейное перемещение РМ от расстояния до первой РМ (z0), длины зоны контроля (L) и изменения высоты плоскости расположения зоны РМ (y).
y=5м.
y=7м.
y=25м.
 Рисунок
Рисунок
1.19 – Минимальное угловое перемещение РМ от расстояния до первой РМ (z0), длины зоны контроля (L) и изменения высоты плоскости расположения зоны РМ (y)
Выводы
На основании анализа технических требований к пространственному положению элементов при эксплуатации сооружений обосновано, что предельные значения контроля РОЭСПТК смещений:
- элементов конструкции перекрытий не должно превышать 5 мм при погрешности не более 0,1 - 0,2 мм.
- элементов конструкции колонн предельные отклонения относительно монтажных осей не должны 15 мм при отклонении осей колонн от вертикали в верхнем сечении (при высоте колонн до 15 м), при погрешности не более 0,5 – 0,7 мм.
Получено выражение для вычисления линейных величин разрешающей способности матричного поля анализа при различных величинах перемещения реперной контрольной метки в случае, когда плоскость установки матричное поле ортогональна биссектрисе угла поля зрения объектива совпадающей с оптической осью этого объектива.
Разработаны программы и алгоритмы для расчета параметров РОЭСПТК при контроле элементов конструкций и сооружений при различных смешениях базового блока в вертикальной плоскости системы координат строительных или монтажных осей.
Проведен теоретический анализ влияния основных параметров схемы блоков РОЭСПТК на параметры элементарного фотоприемного модуля, реализованного в виде единого матричного поля; из графиков представленных на рисунках 1 .8 – 1 .19 видно, что зависимость носит слабую нелинейную зависимость и можно считать линейной.
Результаты математического моделирования в среде MahtLAB показали, что оптимальным с точки зрения минимальных смещений элементов РОЭСПТК является смещение базового блока в плоскости соединяющей контрольные метки.