

5 Системи видеоспостереження
5.1 Завдання
1) Привести структурну схему системи відеоспостереження.
2) Визначити зони відеоконтролю.
3)Розрахувати поле зору об'єктиву відеокамери по горизонталі і вертикалі.
4) Розрахувати фокусні відстані об'єктивів камер.
5) Розрахувати мінімальну деталь об'єкту контролю спостереження
6)Розрахувати чутливість відеокамери.
7)Розрахувати відстань спостереження оператора.
8) Обґрунтувати кінцеве устаткування (зовнішні і/або внутрішні відеокамери).
9) Привести умовні позначення елементів систем відеоспостереження.
10) Виходячи з ТЗ і планів приміщення, а також вимог до розміщення цього устаткування провести вибір місць розміщення відеореєстраторів, крайового устаткування(відеокамери), ліній зв'язку(дротяних або безпровідних), розмірів і кількості моніторів(організація робочого місця оператора).
11) Розрахувати розмір архіву відеореєстратора.
12) На плані приміщення показати розміщення елементів системи.
13) Привести специфікацію і цінові характеристики вибраного в розділі відеоспостереження.
5.2 Структурна схема системи відео спостереження
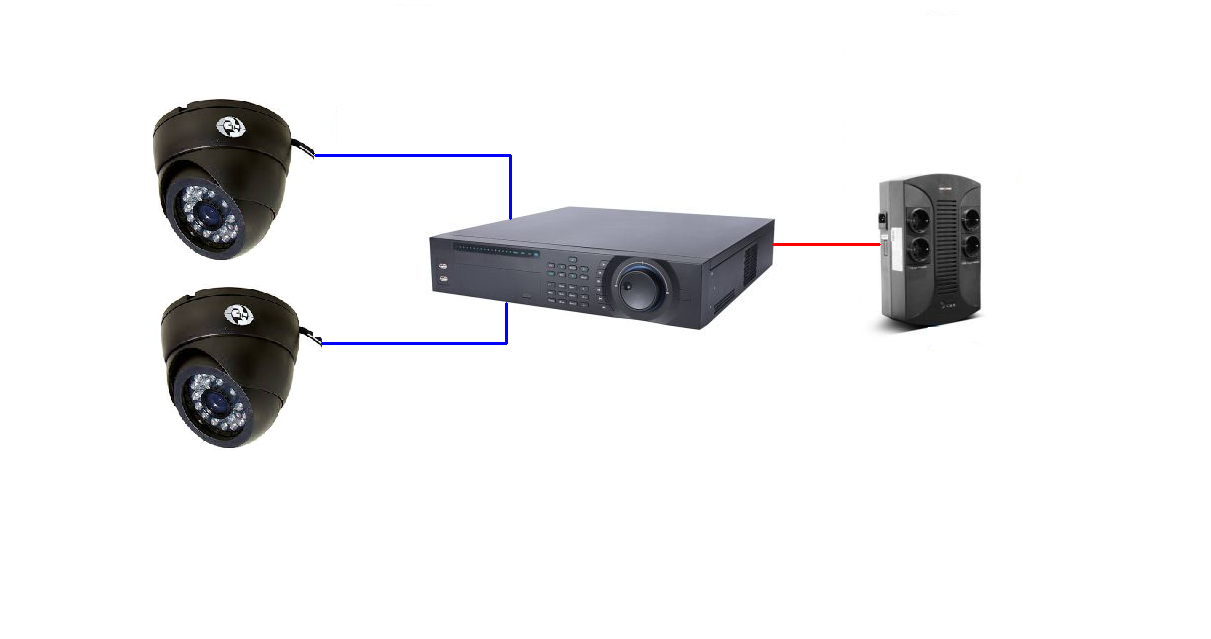
Рисунок 5.1 – Структурна схема системи відео спостереження
Таблиця 5.1 – Вибір обладнання та його умовні позначення
|
Купольна відеокамера “Atis AD-420IR24B/6” |
|
Сервер (Відеорегістратор Dahua DH -DVR0804HF-S-E) |
|
Блок безперебійного живлення (LogicPower 650VA-PS) |



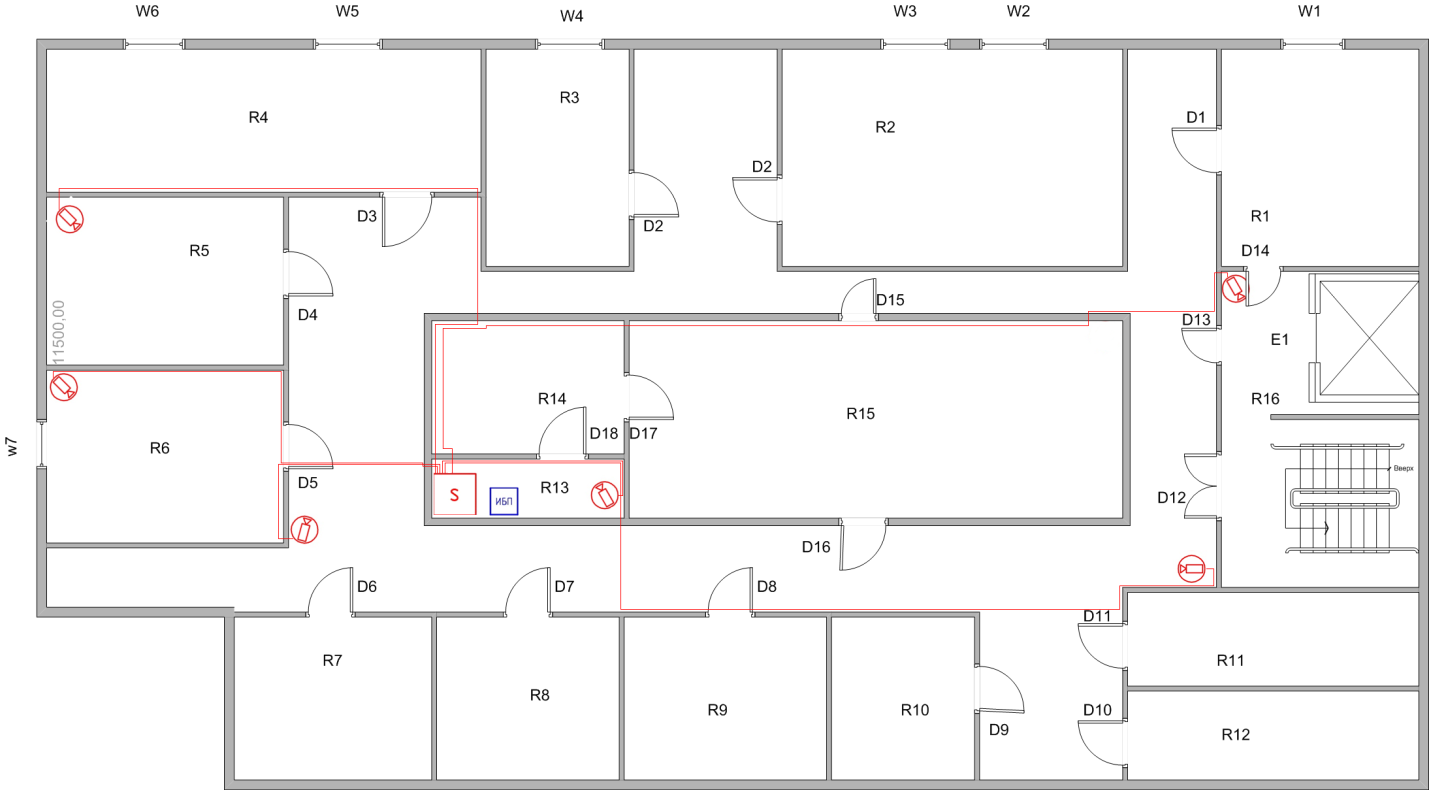
Рисунок 5.1 – Розташування системи відеоспостереження
5.3 Визначити зони відеоконтролю
- кабінет бухгалтера;
- серверна;
- кабінет дизайнерів;
- коридори;
- площа біля ліфту та сходів.
Таблиця 5.2 – Значення висоти та ширини матриці
Оптичний формат ПЗЗ-матриці, дюймів |
Ширина V, мм |
Висота Н, мм |
1/3 |
4,8 |
3,6 |
5.4 Розрахунок поля зору об’єктиву
Вибiр
кожної конкретної ТК починають з
розрахунку необхiдного поля зору
об’єктиву по горизонталi (V)
i вертикалi (Н),
а також вiдстанi до об’єкта контролю
(D). За
цими даними кути зору необхiдного
об’єктива по горизонталi ( )
i вертикалi (
)
i вертикалi ( )
визначають за формулами:
)
визначають за формулами:
 (5.1)
(5.1)
 (5.2)
(5.2)
де V, H - поле зору об’єктива по горизонталi i вертикалi, мм;
D - вiдстань до об’єкта контролю, м.
Дані
розраховані за допомогою сформованої
математичної структури raschet lens.xls для
 та
та
 зображені на рис. 5.4, рис. 5.5 відповідно.
зображені на рис. 5.4, рис. 5.5 відповідно.
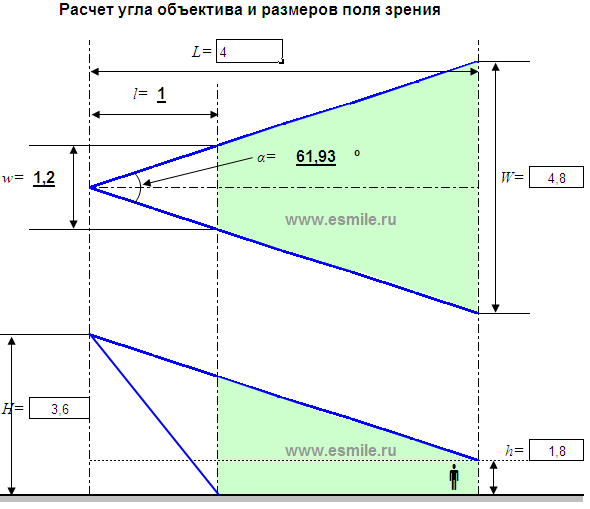
Рисунок 5.3 – Кут обзору об’єктива по горизонталі
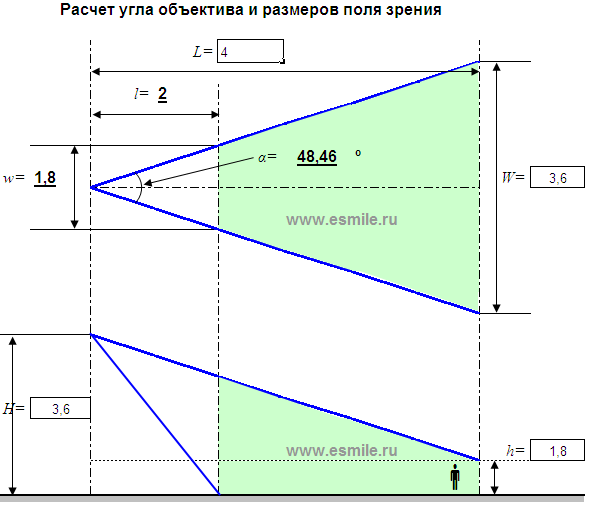
Рисунок 5.4 – Кут обзору об’єктива по вертикалі
5.5 Розрахунок фокусної вiдстанi
Фокусна відстань об’єктива (f) визначається:
 (5.3)
(5.3)
 (5.4)
(5.4)
де ав i аг – поле зору по горизонталi i вертикалi, мм; wм, hм – висота і ширина поля зору відеокамери, м; f1, f2 - фокуснi вiдстанi об’єктиву, мм. Iз значень f1 та f2 вибирають менше для охоплення всього необхiдного поля зору. Потiм вибирають стандартний об’єктив знайближчим меншим фокусною відстанню, який забезпечує декілька більше поле зору.
5.6 Розрахунок мiнiмальної деталi об’єкта контролю
Мiнiмальна деталь об’єкта контролю, цє мiнiмальна деталь яка може розрiзнятися за допомогою обраних камери i об’єктиву вона розраховується за формулами:
 (5.5)
(5.5)
 (5.6)
(5.6)
де,
R -
роздiльна здатнiсть, ТВЛ; D
- вiдстань до об’єкта контролю, м;
 ,
,
 - Розмiри МРД по горизонталi i вертикалi,
мм. Після цього розраховане значення
розмiру МРД по горизонталi порiвнюють з
показниками, наведеними в таблиці.
- Розмiри МРД по горизонталi i вертикалi,
мм. Після цього розраховане значення
розмiру МРД по горизонталi порiвнюють з
показниками, наведеними в таблиці.
Таблиця 5.4 – Розмір МДР в залежності від цільової задачі відеоконтролю
Цільова задача відеоконтролю |
Розмір МРД по горизонталі, мм |
Ідентификація |
До 2 |
Розрізнення |
До 15 |
Виявлення |
Більш 15 |
5.7 Розрахунок чутливостi вiдеокамери
При визначеннi необхiдної чутливостi ТК до уваги повинно прийматися наступне:
- тип джерела освітлення (спектральнаа характеристика);
- освiтленiсть сцени;
- коефiцiєнт вiдбиття об’єкта контролю;
- коэффициент пропускания объектива.
Послiдовнiсть визначення чутливостi наступна:
а) за допомогою люксметри, який має спектральну характеристику, вiдповiдну характеристицi зору людини, вимiрюють освiтленiсть сцени;
б) визначають значення коефiцiєнта вiдбиття реального об’єкта контролю (за таблицi 5.5)
Таблиця 5.5 — Коефіцієнт відображення об'єкта контролю
Об’єкт контролю |
Коєфіцієнт відбиття, % |
Одяг людини: - Білого кольору - Брудно-білого кольору - Жовтого кольору - Жовто-коричневого кольору - Сірого кольору - Кольору слонової кістки - Яскраво-блакитного кольору - Яскраво-зеленого кольору |
80…90 75…80 75…85 30…40 20…60 75…80 35…60 50…75 |
Обличча людини |
15…25 |
в) по технiчнiй документацiї визначають свiтлосилу об’єктиву для визначення необхiдного коефiцiєнта проходження (таблиця 5.6)
г)
розраховують мiнiмальну освiтленiсть на
датчику зображення ( );
);
 (5.7)
(5.7)
де
– освітленість на датчику зображення,
лк;
 – освітленість сцени, лк; R – коефіцієнт
відбиття об’єкта контролю; F – свiтлосила
об’єктиву; Т – коефіцієнт передачi
об’єктива.
– освітленість сцени, лк; R – коефіцієнт
відбиття об’єкта контролю; F – свiтлосила
об’єктиву; Т – коефіцієнт передачi
об’єктива.
= 300лк ( середнє значення для приміщення)
R = 0,4 – середнiй коефiцiєнт вiдбиття об’єкта контролю;
F = 2,0 – свiтлосила об’єктиву, вiдповiдна паспортними даними на об’єктив;
T = 0,05 – коефiцiєнт проходження свiтла в об’єктивi, обраний вiдповiдно до таблицi.
Отриманий результат повинен бути вище чутливостi, зазначеної
в паспортi на ТК для даного типу джерела освiтлення.
Таблиця 5.6 – Світлосила об’єктиву і коефіцієнт проходження
Світосила, F |
Відносний отвір |
Коєфіцієнт проходження |
0,80 |
1:0,80 |
0,31 |
0,95 |
1:0,95 |
0,2 |
1,2 |
1:1,2 |
0,14 |
1,4 |
1:1,4 |
0,1 |
2,0 |
1:2,0 |
0,05 |
2,8 |
1:2,8 |
0,025 |
4,0 |
1:4,0 |
0,0125 |
5,6 |
1:5,6 |
0,00625 |
8,0 |
1:8,0 |
0,003125 |
перевищують показник чутливості камери, зазначений у паспорті на ТК.
5.8 Розрахунок вiдстанi спостереження
Вибiр вiдстанi спостереження (вiд оператора до монiтора) проводиться наступним чином:
- мiнiмальна вiдстань спостереження вибирають з мiркувань безпеки оператора (зменшення впливу випромiнювання вiд монiтора). Воно становить приблизно п’ять дiагоналей екрану монiтора;
- максимальна вiдстань спостереження повинно бути таким, щоб характеристики зору людини (гострота зору, пороговий контраст) не впливали на загальне роздiльна здатнiсть СОТ.
Максимальна вiдстань спостереження розраховують за формулою:
 (5.8)
(5.8)
де
D –
максимальна вiдстань спостереження,
см; d –
розмiр вiдеомонiтора по дiагоналi, см; R
– роздільна здатнiсть СОТ по горизонталi,
ТВЛ;
 - гострота зору людини.
- гострота зору людини.
Розрахунки проведені для наступних даних:
- гострота зору людини – 1 (одна кутова хвилина)
- R = 600 ТВЛ – роздільна здатність системи (одна кутова хвилина);
- d = 0,48 м.
5.10 Розрахунок обсягу дискового простору
Таблиця 5.8 – Вихідні дані для розрахунку глибини архіву відеореєстратора
№ |
Варіант |
Розмір кадру, кб |
Час зберігання архіву, днів |
Швидкість запису, к/с |
6 |
20-24 |
43,6 |
30 |
25 |
Розрахунок робляться за формулою:
S=N*F*V*T*0.0824 (5.9)
де S – обсяг дискового простору (ГБ або ТБ); N – кiлькiсть каналів, по яких ведеться запис (дані відеореєстратора, кількості портів); F – розмір кадру (кБ) (залежить від формату стиснення, див. тех. характеристики відеореєстратора); V – швидкість запису на канал (к/с); T – час, протягом якого необхідно вести запис (кiлькiсть днів);
S=5*43,6*25*30*0,0824= 13472,4 ГБ
Для глибини архіву я буду використовувати 4 Жорстких дисків Hitachi (HGST) Deskstar NAS 4TB, розміром по 4 ТБ, що дасть в сумі 16 ТБ дискового простору, цього буде достатньо.