

Заключение
В данной курсовой работе были получены навыки по осуществлению регулирования входной дверью посредством кнопок оператора и турникета
Были выбраны датчики, аппараты, элементы управления. Изучены их технические данные, фирма изготовитель.
Временная диаграмма отразила работу объекта.
Была составлена блок-схема алгоритма работы объекта и блок-схема подпрограммы для таймера.
Для расчета сечения проводов была выбрана программа Microsoft Excel. Сечения проводов были взяты из таблицы «Допустимый длительный ток для проводов с резиновой и поливинилхлоридной изоляцией с алюминиевыми жилами» из Правил устройства электроустановок. Также в данной работе была составлена электрическая схема подключения аппаратов и двигателей.
Список использованной литературы
А. А. Копесбаева, В. М. Тарасов. Цифровая техника и микроконтроллеры. Методические указания к выполнению лабораторных работ для студентов всех форм обучения специальности 5В071800 - Электроэнергетика - Алматы: АУЭС, 2012. – 54 с.
Правила устройства электроустановок Республики Казахстан (ПУЭ).
Однокристальные микроконтроллеры PIC12C5x, PIC16x5x, PIC14000, M16C/61/62 пер. с англ. Б.Я. Прокопенко; Под ред. Б.Я. Прокопенко.- М.:ДОДЭКА, 2000. – 336с.
http://www.turniket.info/
Приложение а
Биты подключения Кн1, Кн2, ТурS, ТурV |
Время работы, сек |
КТ |
|
7, 6, 4,3, |
1 |
Таблица 4 – Биты продключения
Листинг программы
Sch_in EQU h'20'
Sch_out EQU h'21'
Sch3 EQU h'22'
L EQU h'23'
A EQU H'24'
org 0x000
nop
nop
nop
org 05h
CLRF STATUS
BSF STATUS,5
CLRF TRISC
BCF STATUS,5
CLRF PORTC
MOVLW D'10'
MOVWF A
MOVLW D'0'
MOVWF L
MOVLW B'10000000'
MOVWF PORTC
BSF PORTC,1
MOVLW D'140'
CALL TIMER
METKA1
MOVLW B'00010000'
MOVWF PORTC
BTFSC PORTC,4
INCF L,1
MOVLW B'00001000'
MOVWF PORTC
BTFSC PORTC,3
DECF L,1
MOVF L,0
SUBWF A,0
BTFSS STATUS,Z
GOTO METKA1
BCF PORTC,1
GOTO $
TIMER
MOVWF Sch3
METKA3 MOVLW D'150'
MOVWF Sch_out
METKA_OUT
MOVLW D'255'
MOVWF Sch_in
METKA_in
DECF Sch_in,1
BTFSS STATUS,Z
GOTO METKA_in
DECF Sch_out,1
BTFSS STATUS,Z
GOTO METKA_OUT
DECF Sch3,1
BTFSS STATUS,Z
GOTO METKA3
RETURN
END
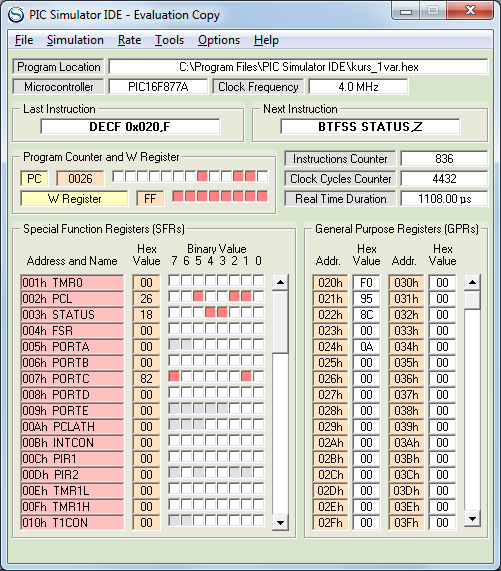
Рисунок 10 – Вывод результата в симуляторе