

3. Пуск с включением активных сопротивлений в
обмотку ротора а. д. с фазным ротором
А.д. с фазным ротором пускают в ход с помощью активных сопротивлений,
включенных в цепь ротора. Наличие таких сопротивлений уменьшает бросок
тока и увеличивает пусковой момент двигателя вплоть до значения его
максимального момента (рис.9.4).
При включении добавочных сопротивлений будет увеличиваться пусковой момент. Момент двигателя пропорционален магнитному потоку Ф и активной составляющей тока ротора I2cоφ2.
Прямой пуск
А.Д. происходит при очень низких cоφ2
= 0,2
0,3.
Это связано с тем, что в первый момент
пуска, благодаря инерционности, двигатель
стоит на месте и частота тока в роторе
ƒ2
= ƒ1
= 50Гц. При достижении номинальных
оборотов частота тока в роторе уменьшается
до значения ƒ2
= 1
4
Гц. Известно, что индуктивное сопротивление
пропорцио- нально частоте
![]() .
Следовательно при пуске двигатель
имеет большое индуктивное сопротивление
и низкий cоφ2.
По мере разгона ротор догоняет
.
Следовательно при пуске двигатель
имеет большое индуктивное сопротивление
и низкий cоφ2.
По мере разгона ротор догоняет
магнитное поле статора и пересекается линиями магнитной индукции 1-4 раза в секунду, соответственно индуктивное сопротивление уменьшается, а
это равносильно увеличению активного сопротивления и соответственно активной составляющей тока ротора. При пуске активная составляющая мала, поэтому и момент пусковой мал.
![]()
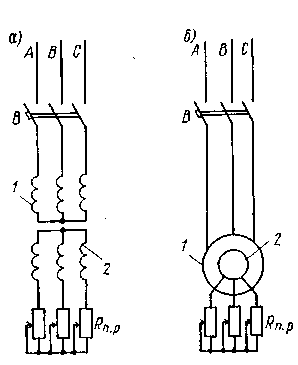
Рис.9.3. Эл.схема АД с фазным ротором.
При включении активных сопротивлений в цепь ротора будет увеличиваться cоφ2, а значит и момент двигателя. Можно подобрать такое сопротивление, чтобы момент при пуске был равен максимальному
Максимальный момент согласно формуле не зависит от активного сопротивления обмотки ротора и будет оставаться постоянным на любой характеристике. Частота вращения магнитного поля статора не изменяется, поэтому все характеристики идут из одной точки. Величина критического скольжения прямо пропорциональна активному сопротивлению обмотки ротора, поэтому при включении активных сопротивлений критическое скольжение будет расти и при этом будет увеличиваться крутизна искусственных характеристик в зоне устойчивой работы, а максимальный момент смещается в область низких частот вращения.
Недостатком этого способа пуска является снижение жесткости механической характеристики и соответственно увеличение потерь.
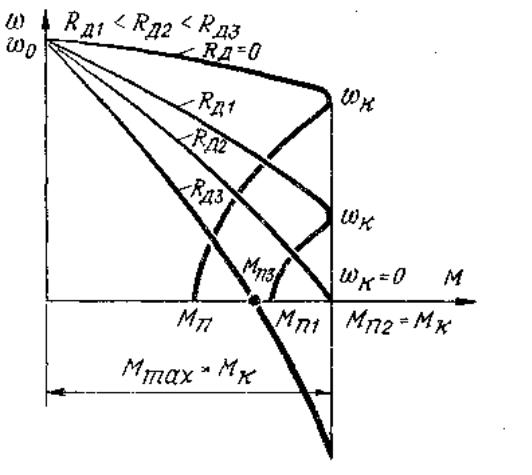
Рис.9.4. Пуск с включением активных сопротивлений в
обмотку ротора а. д. с фазным ротором
Лекции 10, 11
тема занятий: 3. Регулирование частоты вращения асинхронного
электродвигателя
Вопросы:
10.1. Регулирование частоты вращения АД изменением частоты питающего тока
11.1. Регулирование частоты вращения АД изменением числа пар полюсов обмотки статора
11.2 Регулирование частоты вращения АД изменением скольжения
Скорость вращения ротора n2 можно определить следующей формулой:
![]()
отсюда:
![]() ;
;
![]() ;
;
![]()
Из формулы следует, что скорость асинхронного двигателя можно изменить следующими способами: