

Раздел III. Теория электропривода переменного тока
Лекция 8
тема занятий: Механические характеристики
асинхронного двигателя
Вопросы:
8.1. Принцип работы асинхронного двигателя
8.2. Соединение выводов обмотки статора
8.3. Построение механической характеристики асинхронного двигателя
8.4. Вращающий момент AD
Принцип работы асинхронного двигателя
При подключении трехфазной обмотки статора к сети, по ней потечет трехфазный ток, вокруг обмоток статора наведется магнитное поле. Трехфазный ток создает вращающее магнитное поле, которое вращается с синхронной угловой скоростью.
![]()
Это поле, пересекая проводники обмотки ротора, индуцирует эдс E2, под действием которой по цепи ротора потечет ток:
![]()
Ток ротора, взаимодействуя с магнитным полем статора, создает вращающий электромагнитный момент
![]()
![]() - постоянная
величина для данного двигателя,
- постоянная
величина для данного двигателя,
![]() - активная
составляющая тока ротора.
- активная
составляющая тока ротора.
Под действием этого момента ротор вращается в ту же сторону, что и магнитное поле статора, но с отставанием от него
![]()
Поле статора относительно вращающегося ротора вращается с угловой скоростью
ω = ω1 – ω2
с этой скоростью поле статора пересекает обмотку ротора и индуктирует в ней эдс E2S с частотой скольжения ƒ2
![]()
Частота тока в
роторе изменяется от 50 Гц при пуске,
когда s =1
![]()
до 1-2 Гц при
номинальном режиме: sН
=0,02
![]() 0,04
0,04
![]() .
.
В связи с изменением во вращающемся роторе частоты, изменяется и
зависящая от нее эдс Е2, индуктивное сопротивлениеХ2, ток ротора I2 и cos f2.
Эдс Е2 при скольжении обозначают Е2S
Е2S= Е2 s
соответственно
![]() при
при
![]() обозначают
обозначают
![]()
![]()


Соединение выводов обмотки статора
Выводы обмотки статора соединяют звездой или треугольником для того, чтобы двигатель можно было подключить к двум разным напряжениям.
Обмотка статора рассчитана на фазное напряжение, напряжение в сети – это линейное напряжение. Если обмотку статора соединить треугольником, то к двигателю придет то же напряжение, что и в сети. Если обмотку статора соединить звездой, то на фазу двигателя придет напряжение на √3 меньше чем напряжение в сети.
Соединение звездой Υ. Uаb , Ubc , Uac- линейные напряжения, напряжения приложенные между разными фазами.
Ua Ub Uc- фазные напряжения- напряжения, приложенные между началом
и концом одной фазы (рис.8.1).
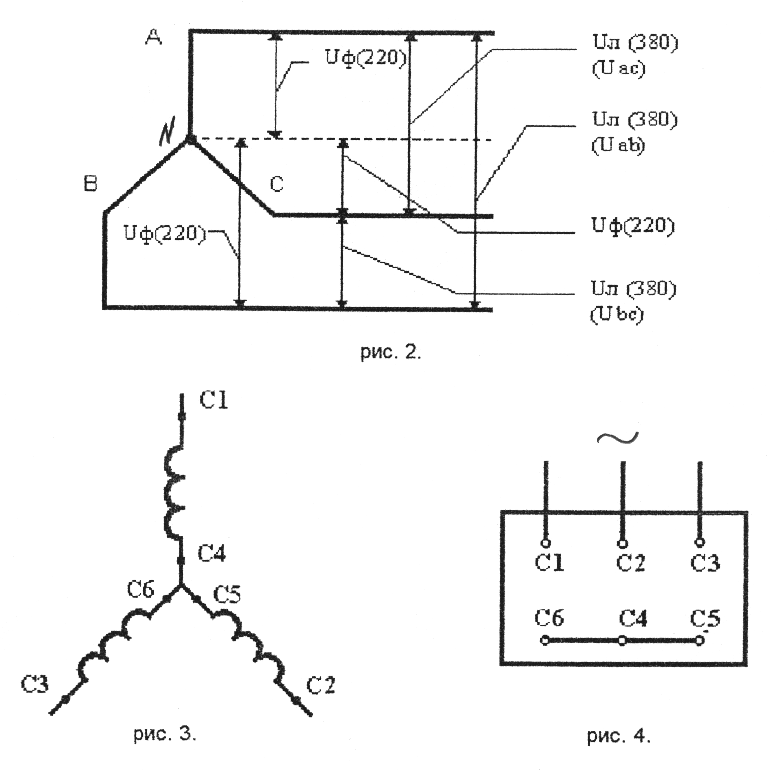
Рис.8.1 Соединение обмоток статора звездой.
UAB, UCA, UBC – линейное напряжение, Uab, Ubc, Uca,-фазное напряжение,
IA, IB, IC, -линейные токи, Iab, Ibc, Ica –фазные токи.
Соединение треугольником Δ: Uл=Uф Iл=3Iф (рис.8.2)
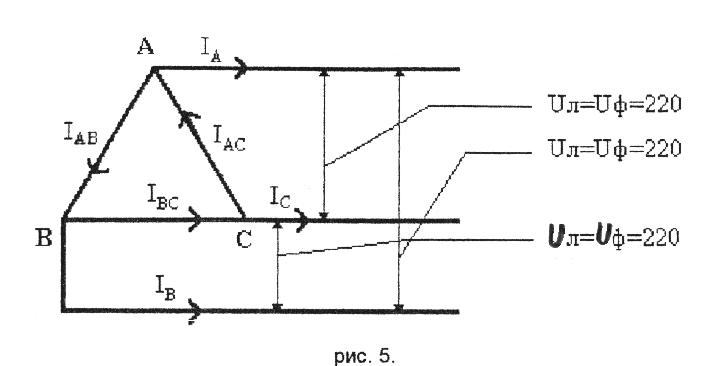
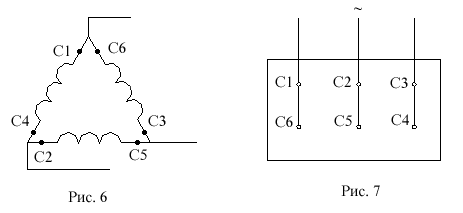
Рис.8.2 Соединение обмоток статора треугольником.
UАВ, UСА, UВС - линейные напряжения; Uав, Uвс, Uса, - фазные напряжения;
IА, IВ, IС –линейные токи; Iав, Iвс, Iса - фазные токи.
Пример: Эл. двигатель рассчитан на напряжение 220/380в.
Как необходимо соединить выводы обмотки при подключении к сети а)220в
б) 380в.
Решение: Напряжение сети – это линейное напряжение. Напряжение на двигателе - фазное. Фазным является меньшее напряжение, указанное на двигатели, второе U указывают для того, чтобы знать к каким двум напряжениям можно подключить данный двигатель, но на фазу в любом случае придёт одно и тоже U. В данном примере Uф=220в (меньшее)
Если Uc=220в
UЛ=220в
Uф=220в
![]()
Если Uc=380в UЛ=380в Uф=220в Υ
Построение механической характеристики AD
Механическая
характеристика AD
– это зависимость частоты вращения от
момента
![]() или
зависимость момента от скольжения
или
зависимость момента от скольжения
![]() .
Механические характеристики показаны
на рис.3.3
.
Механические характеристики показаны
на рис.3.3
На рис3.3 а) показана характеристика . Она строится по трем точкам:
m.1 M=Mn S=1 m.3 M=Mn S=Sn
m.2 M=Mmax S=Skp m.4 M=0 S=0
а) б)
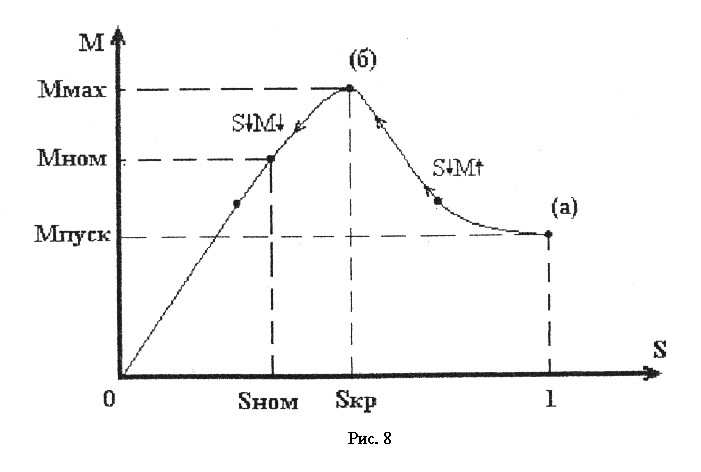
Рис.8.3. а) Механическая характеристика АД ; б) Механическая характеристика АД .
Чтобы построить х-ку необходимо повернуть х-ку на 900.
m.1 M=Mn
![]() m.3 M=Mn
m.3 M=Mn
![]()
m.2
M=Mmax
![]() m.4 M=0
m.4 M=0
![]()
Вращающий момент AD
 8.1
8.1
Вывод формулы:
Из схемы замещения
(рис.3.4) видим, что мощность потребляемая
из сети двигателя определяется
выражением:
![]()
U1,I1 - фазные значения соответственно U, I
cos![]() - коэффициент мощности двигателя.
- коэффициент мощности двигателя.
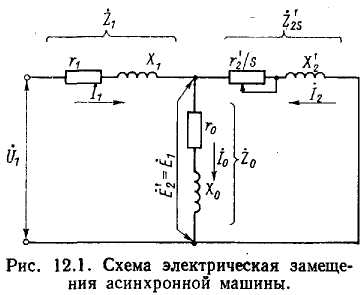
Рис.8.4 Схема замещения АД
Пренебрегая
потерями в статоре можно считать, что
мощность полностью передается от
статора, поле которого вращается с
угловой скоростью
![]() к ротору
к ротору
![]()



т.к. E1![]() E2
и обмотки электрически не связаны, для
того чтобы производить вычисления,
необходимо привести параметры обмоток
ротора к обмотке статора.
E2
и обмотки электрически не связаны, для
того чтобы производить вычисления,
необходимо привести параметры обмоток
ротора к обмотке статора.
Приведение
осуществляется, исходя из соотношения
![]() и условия ,что все мощности до приведения
должны быть равны мощности после
приведения:
и условия ,что все мощности до приведения
должны быть равны мощности после
приведения:
![]() ;
;
![]() ;
r2/=k2r2;
x2/=k2x2;
z2/=k2z2.
;
r2/=k2r2;
x2/=k2x2;
z2/=k2z2.
Из формулы момента следует, что вращающий момент AD: