

Изменением сопротивления цепи якоря;
Изменением магнитного потока возбуждения;
Изменением напряжения, приложенного к цепи якоря эд.
Изменение сопротивления цепи якоря
При регулировании скорости ЭД этим способом в цепь якоря включается добавочный резистор RД. Вследствие этого угловая скорость уменьшается (рис5.1.), что объясняется следующим:
Rя = 0, естественная
характеристика
Rя = R,
искусственная характеристика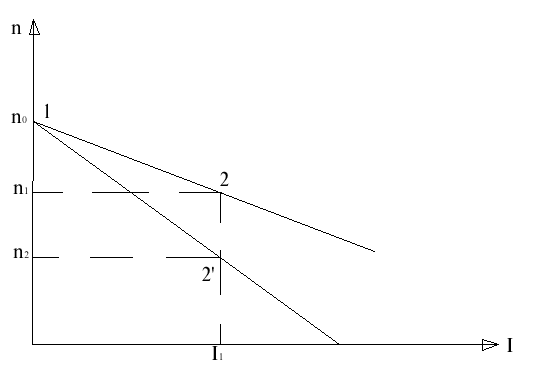
Рис.5.1. Механические характеристики электродвигателя при включение добавочных сопротивлений в цепь якоря.
В момент включения резистора в цепь якоря угловая скорость не может изменяться мгновенно из-за инерции ЭП и остается постоянной, поэтому в этот момент времени ток становится меньше.
До включения резистора ЭД имел следующие параметры:
I1 – ток якоря
М1 – момент на валу
ω1уст – установившаяся угловая скорость
![]()
В момент включения добавочного резистора ток становится равным I2.
![]()
I2 < I1 – соответственно уменьшается и момент
М2 < М1
Если считать статический момент нагрузки неизменным Мст = М1, то в данном случае равенство моментов нарушится. Следовательно, появится отрицательный избыточный момент т.к. М2 – Мст < 0 и происходит замедление вращения вала ЭД до тех пор, пока ток, который при этом увеличивается из-за уменьшения ЭДС (Е = kФω↓), не возрастет до прежнего значения:
![]()
Только в этом случае момент электродвигателя М2 = kФI2 снова станет равным статическому моменту нагрузки. Работа электропривода будет происходить при новой установившейся угловой скорости ω2уст меньшей, чем начальная ω1уст.
Если статический момент при регулировании не останется постоянным, а уменьшится, то равенство наступает при меньшем значении тока I2.
Регулирование этим способом возможно только вниз от номинальной угловой скорости.
Чем больше R1, тем меньше угловая скорость. Добавочные резисторы называются регулировочными. Жесткость регулировочных характеристик по сравнению с естественной сильно уменьшается при увеличении регулировочных сопротивлений. Увеличиваются и потери ЭП вследствие увеличения потерь на резисторах. По регулировочным резисторам протекает большой ток якоря, поэтому регулирование сопровождается значительными потерями энергии.
Изменение магнитного потока возбуждения
Регулирование скорости ЭД этим способом, осуществляют, включая регулировочный резистор Rр в цепь обмотки возбуждения ЭД (Рис.5.2). Это приводит к уменьшению тока возбуждения, а значит и к уменьшению намагничивающей силы и магнитного потока. В результате угловая скорость якоря ЭД увеличивается по сравнению с номинальной, при полном потоке возбуждения. Это объясняется следующим.
При уменьшении магнитного потока от Ф1 до Ф2 ток электродвигателя в первый момент регулирования увеличивается, т.к. из-за инерции угловая
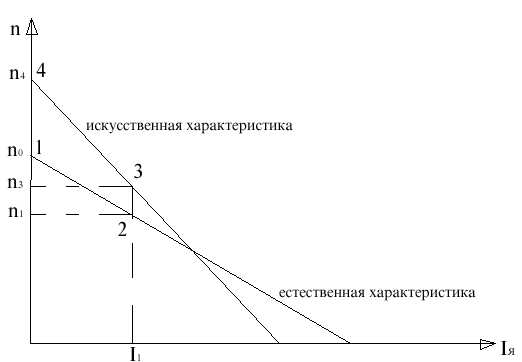
Рис. 5.2. Регулирование скорости эл.двигателя включением добавочных резисторов в цепь обмотки возбуждения ДПТ
скорость мгновенно измениться не может:
![]()
![]()
![]() т.к. Ф2
>Ф1
т.к. Ф2
>Ф1
Значение Е1 = kФ1ω1 ненамного меньше U, поэтому даже небольшое уменьшение потока приводит к значительному увеличению тока.
(Ток увеличивается в большей степени, чем уменьшается поток).
Т.к. ток возрастает, возрастает и вращающий момент.
М1 = kМФ1I1 М2 = kМФ2I2
Появляется положительный избыточный момент М2 – Мст > 0 и происходит ускорение вращения вала ЭП. При этом возрастает ЭДС и уменьшается ток.
Е = kФω
↑
![]()
![]()
Это продолжается до тех пор, пока не установится равновесие моментов М2 = kФ2I2 = Мст при котором ток I2
![]()
Регулирование этим способом возможно только вверх от номинальной скорости. Потери в регулировочном резисторе из-за небольшого тока возбуждения очень незначительны. Поэтому этот способ экономичен.
Жесткость механических характеристик с уменьшением потока уменьшается.
Обычные ЭД допускают увеличение угловой скорости посредством ослабления потока не более чем на 10-20 % по сравнению с номинальным,
т.к. увеличение угловой скорости ограничено механической прочностью ЭД.
Изменение напряжения, приложенного к якорю ЭД
Этот способ используется в том случае, если двигатель питается от своего генератора.
На судах используют специальные системы Г-Д, работающие по принципу изменения подводимого к исполнительному двигателю напряжения. Система Г-Д как минимум состоит из трех электрических машин: исполнительного электродвигателя М2, приводящего в действие механизм; генератора G1, питающего исполнительный ЭД; приводного электродвигателя М1, вращающего якорь генератора и образующего с ним так называемый преобразователь.
Машины М2 и G1 – постоянного тока с независимым возбуждением. Для питания обмоток возбуждения машин G1 и М2 используют четвертую машину – возбудитель G2. Это генератор постоянного тока с параллельным возбуждением. Он приводится во вращение тем же приводным ЭД, что и генератор G1.
Сначала пускают приводной двигатель, якорь которого вращается постоянно в одну сторону с неизменной скоростью. Потом возбуждают возбудитель, создающий неизменное U. От него получают питание независимые обмотки L1G1 и генератора G1 и LM2 исполнителя двигателя М2.
В цепь обмотки возбудителя генератора включен регулировочный резистор RP1 и переключатель SA, изменяющий направление тока в обмотке L1G1. Перед пуском резистор RP1 должен быть полностью введен в цепь, а резистор в цепи возбуждения двигателя RP2 выведен.
Для пуска М2 переключатель SA устанавливается в одно из рабочих положений и постепенно выводят резистор RP1, увеличивая этим ток возбуждения в обмотке L1G1. Генератор возбуждается и подает плавно возрастающее напряжение на якорную обмотку М2. По цепи якорей G1 и М2 протекает ток. Т.к. М2 возбужден, его якорь начинает вращаться, и по мере возрастания напряжения, подведенного к его якорю, увеличивается угловая скорость. Для реверса, переключателем SA изменяют направление тока в обмотке возбуждения L1G1. Генератор изменяет полярность напряжения, ток якорной цепи изменяет направление, и исполнительный ЭД реверсируется. Остановка происходит при отключении обмотки L1G1 тем же переключателем.
Регулирование скорости вниз от номинальной выполняют, вводя в цепь обмотки возбуждения L1G1 регулировочный резистор RP1. Ток возбуждения, магнитный поток и напряжение генератора уменьшаются. Вследствие этого снижается U, подводимое к обмотке якоря М2 и его угловая скорость уменьшается.
Характеристики, расположенные вниз (рис.5.3) от номинальной получаются при уменьшении подводимого к двигателю U.
Следуя из уравнения:
![]()
т.к.
![]() =const,
угол наклона на всех характеристиках
одинаковый (они параллельны). Значение
=const,
угол наклона на всех характеристиках
одинаковый (они параллельны). Значение
![]() при изменении подводимого напряжения
изменяется, следовательно, на каждой
характеристике своя частота вращения
х.х.
при изменении подводимого напряжения
изменяется, следовательно, на каждой
характеристике своя частота вращения
х.х.
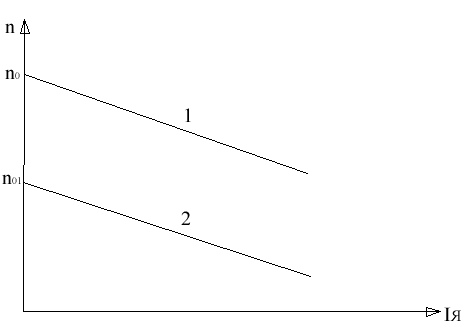
Рис. 5.3. Механические характеристики ДПТ при работе по системе Г-Д.
Чтобы получить частоту вращения выше номинальной (характеристики располагаются вверх от номинальной) необходимо изменить магнитный поток в обмотке возбуждения электродвигателя.
Регулирование скорости вверх от номинальной осуществляют вводя в цепь обмотки возбуждения М2 регулировочный резистор RP2, что уменьшает ток и поток возбуждения, при этом скорость ЭД увеличивается.
Лекция 6
тема занятий: Способы пуска двигателей постоянного тока
Вопросы:
6.1. Прямой пуск
6.2. Пуск, с включением в цепь якоря пусковых сопротивлений
Прямой пуск
Наиболее простым способом пуска электродвигателя является прямой, когда двигатель включается непосредственно на полное напряжение сети. В момент пуска двигатель неподвижен n=0, следовательно, и ЭДС якоря равна нулю и пусковой ток определяется по закону Ома.
![]()
При вращении якоря в его обмотке наводится ЭДС, направленная навстречу приложенному напряжению U. Значение этой ЭДС прямо пропорционально магнитному потоку Ф и угловой скорости n. Т.е. Е=kФn , поэтому по мере разгона двигателя ток Iя, протекающий по якорной цепи, будет уменьшаться.
![]()
Т.к. сопротивление обмотки якоря очень мало, то начальный пусковой ток мощных двигателей достигает больших значений.
In = [10 ÷ 20] Iн
Такой бросок тока при пуске недопустим, т.к. вызовет:
а) ухудшение условий коммутации, что явится причиной кругового огня на коллекторе и к.з. в щеточном механизме;
б) провал напряжения в сети, что может нарушить работу остальных потребителей;
в) недопустимое увеличение динамических моментов на валу двигателя, что может привести к механическим поломкам в передаче.
Правилами Речного Регистра разрешено использовать прямой пуск для электродвигателей мощностью не более 1,3 кВт. Двигатели такой мощности имеют обмотку якоря со значительным сопротивлением, в связи с чем броски пускового тока не превышают допустимые.
Пуск с включенными последовательно с якорем пусковыми
сопротивлениями
Последовательно с якорем включают пусковое сопротивление, которое по мере разгона двигателя и роста ЭДС постепенно выводится из цепи якоря. Это сопротивление делят на несколько ступеней, число которых определяют построением пусковой диаграммы.
При реостатном пуске добиваются ограничения броска пускового тока до значения, допустимого по условиям коммутации.
In = [1,8 ÷ 2,5] Iн
При реостатном пуске
![]()
Отсюда ![]()
Величина тока, при которой из цепи якоря выводится ступень сопротивления, называется током переключения Iпер.
Iпер = [1,1 ÷ 1,2] Iн
При выключении из цепи якоря ступени сопротивления наблюдается бросок тока, причем шунтируемое сопротивление R1 должно быть таким, чтобы снова достичь значения In. Оставшееся в цепи якоря сопротивление R2 определяет вторую пусковую характеристику.
R2 = Rобщ - R1
и так постепенно выводятся все ступени, и двигатель выходит на естественную характеристику, по этой характеристике двигатель разгоняется до скорости, при которой его момент будет уравновешен моментом статического сопротивления исполнительного механизма.
Лекция 7
тема занятий: Способы торможения электродвигателей
постоянного тока
Вопросы:
7.1. Рекуперативное торможение
7.2. Динамическое торможение
7.3. Торможение противовключением
Электрическое торможение применяется в ЭП, имеющие частые пуски и остановки. При электрическом торможении выполняются следующие функции:
переход ЭП с большей угловой скорости на меньшую;
ограничивается угловая скорость ЭП, когда он работает в тормозном режиме;
достигаются экстренные остановки.
Для ЭД постоянного тока существуют следующие способы электрического торможения:
Рекуперативное (генераторное торможение)
динамическое
противовключением (противотоком)
Рекуперативное торможение
(генераторное торможение)
Рекуперация – это отдача электрической энергии электродвигателем обратно в питающую сеть.
Рекуперативный режим происходит в том случае, когда якорь ЭД под действием запаса кинетической энергии масс привода и механизма или активного статистического момента вращается со скоростью ω > ωо в ту же сторону, что и в двигательном режиме.
Этот режим может происходить при спуске тяжелого груза грузоподъемным механизмом.
Работая в рекуперативном режиме, ЭД преобразовывает, сообщаемую ему механизмом, энергию в электрическую и возвращает ее в сеть. При этом он развивает отрицательный момент.
При включении ЭД на спуск тяжелого груза (или при наличии каких-либо других внешних воздействий, направленных в сторону движения), угловая скорость якоря постепенно увеличивается. Возрастание угловой скорости вызывает увеличение ЭДС (↑Е = kФω↑), что приводит к уменьшению тока якоря (I = (U – E) / R), соответственно уменьшается вращающий момент ЭД.
При угловой скорости ω = ωо ток, потребляемый ЭД, равен нулю, т.к. напряжение сети уравновесится противо ЭДС обмотки якоря (U = E = kФωо).
При дальнейшем разгоне скорость ω превысит ωо и двигатель перейдет в режим генераторной работы, для чего необходимо выполнить неравенство
E = kФω > U = kФωо. В этом случае ЭДС становится больше напряжения.
Тогда ток I
![]() станет
отрицательным.
станет
отрицательным.
В результате изменения направления тока меняет направление и момент ЭД, который для вращающегося в прежнем направлении привода, является тормозным.
![]()
С увеличением скорости электромагнитный тормозной момент двигателя МТ возрастает. Когда он станет равным движущему моменту исполнительного механизма, разгон прекратится.
Уравнение механической характеристики для этого режима имеет вид:
![]()
МТ – тормозной момент двигателя
Анализируя это выражение, видим, что при увеличении сопротивления R угловая скорость в тормозном режиме не уменьшится, как в двигательном, а увеличивается.
Механические характеристики ЭД в режиме рекуперативного торможения являются продолжением характеристик ЭД в двигательном режиме и проходят в квадрантах II и IV.
Квадрант II – при движении электротранспорта в направлении вперед под уклон.
квадрант IV – при спуске груза.
Недостаток этого способа торможения – большие тормозные скорости.
Достоинство – отдача электроэнергии в сеть.
Для грузоподъемных механизмов в электроприводе подъем считается положительным направлением движения, а спуск – отрицательным.
Динамическое торможение
При динамическом торможении ЭД его якорь отключают от питающей сети и замыкают на резистор, а обмотка возбуждения при этом остается подключенной к сети.
После отключения от сети якорь двигателя некоторое время продолжает по инерции вращаться в магнитном поле полюсов, в результате чего в обмотке якоря индуктируется ЭДС Е, которая в контуре динамического торможения, состоящего из якоря и сопротивления rТ, создает ток
![]()
Rобщ = rя + rт – общее сопротивление контура динамического торможения.
В тормозном режиме ток в якоре изменит свое направление, т.к. теперь он создается не приложенным напряжением, а ЭДС якоря, направленной навстречу напряжению сети. Момент также изменит свое направление и по отношению к прежнему направлению движения будет уже тормозным. Под действием тормозного момента ЭД остановится и тем быстрее, чем момент больше. По мере уменьшения угловой скорости снижается ЭДС, ток и тормозной момент. При полной остановке они равны нулю.
Напишем уравнение механической характеристики при динамическом торможении.
U = 0; M = -MT R = RЯ + RT
![]()
![]()
Это уравнение прямой линии, проходящей через начало координат при МТ = 0; ωТ = 0.
Чем больше величина тормозного сопротивления RT, тем меньше тормозной момент. Наибольший тормозной момент получается при замыкании обмотки якоря непосредственно на себя. Однако при этом возникает ток, не допустимый по условиям коммутации.
Режим динамического торможения применяют для быстрой остановки двигателя, а также для получения посадочных скоростей (nT ≈ 0,1nH) при опускании тяжелых грузов. В этом случае неподвижный ЭД включают по схеме динамического торможения для направления спуска, подключив обмотку возбуждения к сети и замкнув обмотку якоря на тормозное сопротивление. Если на валу действует положительный статический момент, то якорь ЭД под действием этого момента начнет вращаться в сторону спуска и создает тормозной момент МТ. В этом случае опускающийся груз приводит в движение якорь отключенного от сети двигателя. Скорость опускания груза и жесткость механической характеристики определяются величиной тормозного сопротивления. Механическая характеристика изображена в IV квадранте.
Торможение противовключением
При таком способе торможения двигатель, включенный на вращение в одном направлении, под действием внешних сил или по инерции вращается в противоположную сторону.
Режим противовключения может быть осуществлен:
а) при активном статическом моменте на валу – в этом случае ограничивается скорость опускания тяжелых грузов;
б) при реактивном статическом моменте на валу – ускоряется остановка реверсируемых электроприводов.
Режим противовключения при активном статическом моменте наступает, если в цепь якоря двигателя, включенного на подъем груза, ввести значительное сопротивление, уменьшающее пусковой момент двигателя до величины, меньшей момента нагрузки.
Пусть ДПТ работает на естественной характеристике со скоростью ωСТ (т.А), преодолевая момент поднимаемого груза МСТ.
Если в цепь якоря включить сопротивление rT1, то в начальный период времени момент двигателя будет меньше момента, создаваемого грузом (т.Б). Подъем груза будет замедляться, пока не наступит равновесие моментов.
В нашем случае равновесие наступит, когда подъем прекратится и ωДВ = 0 (т.В). Эта точка соответствует режиму к.з. или стоянки двигателя под током, т.е. включению заторможенного двигателя на напряжение сети.
Если при этом в цепь якоря включить добавочное сопротивление rT2, двигатель перейдет на другую характеристику, на которой его пусковой момент будет меньше статического момента рабочей машины (т.Г).
Груз под действием собственного веса начинает опускаться. Двигатель, по-прежнему включенный на подъем, также изменит направление вращения, но будет оказывать тормозящее действие.
В системе привода действует динамический момент, под действием которого груз будет разгоняться. При скорости ωТ тормозной момент двигателя сравняется с движущим моментом груза, в результате чего наступит установившейся режим работы электропривода с постоянной скоростью ωТ (т.Д).
Режим противовключения создается, если при моменте груза МСТ включить двигатель на подъем из состояния покоя при введенных в цепь якоря добавочных сопротивлений rT1 + rT2.
Т.о. непременным условием перехода двигателя в режим противовключения является выполнение неравенства:
Мn < Mст
Т.к. двигатель переходит в тормозной режим только под действием момента нагрузки, без переключения цепей якоря и возбуждения, то его ток и момент сохраняют при этом первоначальное направление.
Момент двигателя по отношению к изменившемуся направлению вращения становится тормозным. Направление магнитного потока осталось прежним, а направление вращения двигателя изменилось, соответственно и ЭДС (Е=knФ) якоря также изменит знак и теперь будет действовать в направлении напряжения сети.
![]() ;
; ![]()
Режим противовключения при реактивном статическом моменте, наступает, если якорь двигателя, работающего со скоростью ωСТ, переключить на обратное вращение. При этом двигатель, обладая запасенной
кинетической энергией, будет продолжать вращаться в прежнем направлении, а в момент переключения – с прежней скоростью. В результате ЭДС обмотки якоря сохранит свой знак, а в начальный момент времени и величину.
Напряжение после переключения изменит направление, и будет действовать согласно ЭДС якоря. Тогда ток в обмотке якоря определяется:
![]()
ток меняет свое направление и достигает недопустимо больших величин. Чтобы ограничить бросок тока во время переключения двигателя на обратное вращение, в цепь якоря включают добавочное сопротивление rT (рис.2.15).
![]()
Т.к ток изменил направление, то и момент двигателя будет действовать в противоположном направлении и становится тормозным по отношению к неизменному направлению движения. Т.о. к валу электродвигателя приложено два тормозящих момента: реактивный статический момент механизма и момент двигателя. Под их действием двигатель будет быстро затормаживаться по механической характеристике БД. Работа на участке БВ соответствует режиму противовключения. В точке В ω = 0, разгоняясь дальше двигатель перейдет в обычный двигательный режим, разгонится до скорости, соответствующей т.Г. В этой точке шунтируется сопротивление rm, после чего двигатель выходит на естественную характеристику и продолжает работать со скоростью – ωст. Т.о. этот режим противовключения возникает при каждом реверсе электропривода.
Положительной особенностью торможения противовключением является быстрая остановка электропривода при мало изменяющемся тормозном моменте.
Недостатками являются значительное потребление из сети электроэнергии, расходуемой на нагрев обмоток и сопротивлений в цепи якоря, а также возможность произвольного реверса.