

Раздел III. Электроприводы рулевых устройств
Лекция 21
тема занятий: Условия нагрева и режимы работы электродвигателей
Вопросы:
21.1. Требования регистра, предъявляемые к рулевым приводам
21.2. Определение мощности и выбор электродвигателей приводов электромеханических рулевых устройств
21.3. Управление электроприводами электромеханических рулевых устройств
Требования регистра, предъявляемые к рулевым электроприводам (РЭП)
1. На морских судах необходимо устанавливать 2 привода - основной и резервный. В том случае, если основной привод является сдвоенным, т.е. 2 агрегата действуют независимо один от другого, установка резервного РЭП не требуется.
2. Исполнительные двигатели РЭП должны допускать полуторакратную перегрузку в течение 1 мин. Для РЭП с механической передачей ИД должен быть рассчитан на минутную стоянку под током с нагретого состояния.
3. Основной РЭП должен обеспечивать перекладку руля от — 35 до + 35° за 30 с.
4. При ходе судна по курсу с наибольшей эксплуатационной скоростью в течение 30 мин. привод должен выдерживать режим перекладок руля на угол, обеспечивающий 350 перекладок в час.
5. В режиме маневрирования РЭП должен при полной скорости хода обеспечивать для каждого агрегата непрерывную перекладку с борта на борт в течение 0,5 ч.
6. Должна быть обеспечена удовлетворительная работа РЭП при заднем ходе судна со средней скоростью.
7. Питание РЭП должно обеспечиваться по двум независимым фидерам, один из которых рекомендуется выводить из аварийного распределительного щита.
8. Защита ЭД рулевого устройства должна быть только от коротких замыканий (при перегрузке включается сигнализация).
9. Пуск и остановка ЭД насосов, приводных двигателей в системе Г-Д предусматривается из двух мест -из румпельного отделения и из рулевой рубки. При этом должен обеспечиваться автоматический пуск при восстановлении напряжения после перерыва в питании.
10. Для РЭП в рулевой рубке и у поста управления главными механизмами должна быть предусмотрена звуковая и световая сигнализация об исчезновении напряжения, обрыве фазы и перегрузке в цепи питания; об исчезновении напряжения в цепи питания системы управления; о минимальном уровне масла в цистерне.
управления.
Управление рулевым устройством в зависимости от типа и системы РЭП осуществляется различно. По принципу управления рулевые электроприводы могут быть разделены на 3 группы; системы простого управления; системы следящего управления; системы автоматического управления.
В системах простого управления для перекладки руля требуется включение ЭД при помощи поста управления (штурвала, рукоятки или кнопки), который удерживается включенным до тех пор, пока руль не займет необходимое положение. Для возврата руля в прежнее положение ЭД реверсируют тем же способом. Положение руля определяется визуально по шкале рулевого указателя или аксиометра. В этой системе при перекладке руля в сторону от диаметральной плоскости и обратно следует осуществить 4 операции: перекладку рулевого поста в сторону, возврат его в среднее положение, перекладку в обратную сторону и возврат опять в среднее положение.
При следящем управлении положение пера руля после отработки соответствует положению штурвала управления. Разность положений в зависимости от знака определяет наличие сигнала управления и перекладку руля в сторону согласования. Иногда рассматриваемый принцип называют управлением по пути. Штурвал механически связан со стрелкой, указывающей заданное положение руля. После отработки руль автоматически перекладывается на требуемый угол, что может быть проверено по аксиометру. В некоторых случаях указательные стрелки заданного и-действительного положений руля работают на общую шкалу совмещенного аксиометра. Для перекладки руля к борту и обратно рулевому нужно совершить только 2 операции: переложить штурвал на нужный угол и дернуть его в нулевое положение. Управление РЭП по этой системе значи-тельно проще и удобнее, требует меньшей затраты физических сил и внимания.
Автоматическое управление предполагает задание угла перекладки руля по определенной программе, разрабатываемой автоматически судовым счетно-вычислительным комплексом в зависимости от решаемых навигационных или иных задач. В настоящее время на транспортных судах применяют наиболее простые рулевые автоматы, обеспечивающие автоматическую стабилизацию судна на заданном курсе. При меньших угловых отклонениях руля авторулевые точнее удерживают судно на курсе, что благодаря спрямлению линии движения сокращает проходимое расстояние на 2,5-3% по сравнению с ручным управлением. Уменьшение тормозного действия отклоненного руля способствует некоторому увеличению средней скорости судна.
Выполнение функций РЭП согласно изложенным выше принципам обеспечивается электрическими системами управления
Определение мощности и выбор электродвигателей
приводов электромеханических рулевых устройств
Сила действия воды на руль зависит от многих факторов, трудно поддающихся учету, поэтому ее определяют эмпирически, на основании опыта эксплуатации большого количества судов.
Момент, создаваемый на баллере руля силой Р,
Мб=Рl
где l — расстояние от оси баллера до точки приложения силы (центра давления воды на руль).
Моменты на баллере руля зависят от угла его перекладки;
Мб =ƒ(а),
причем максимальное значение момента наступает при угле перекладки 35°, поэтому Правилами Российского Речного Регистра установлено требование перекладки руля на этот угол.
Рассмотрим зависимости момента на баллере руля от угла перекладки для простого (рис. 6.1, а) и балансирного (рис. 6.1, б) рулей. Начальные углы приняты отрицательными, конечные — положительными независимо от направления перекладки руля.
Балансирные
и полубалансирные рули на участке от
00
до
![]() имеют
имеют
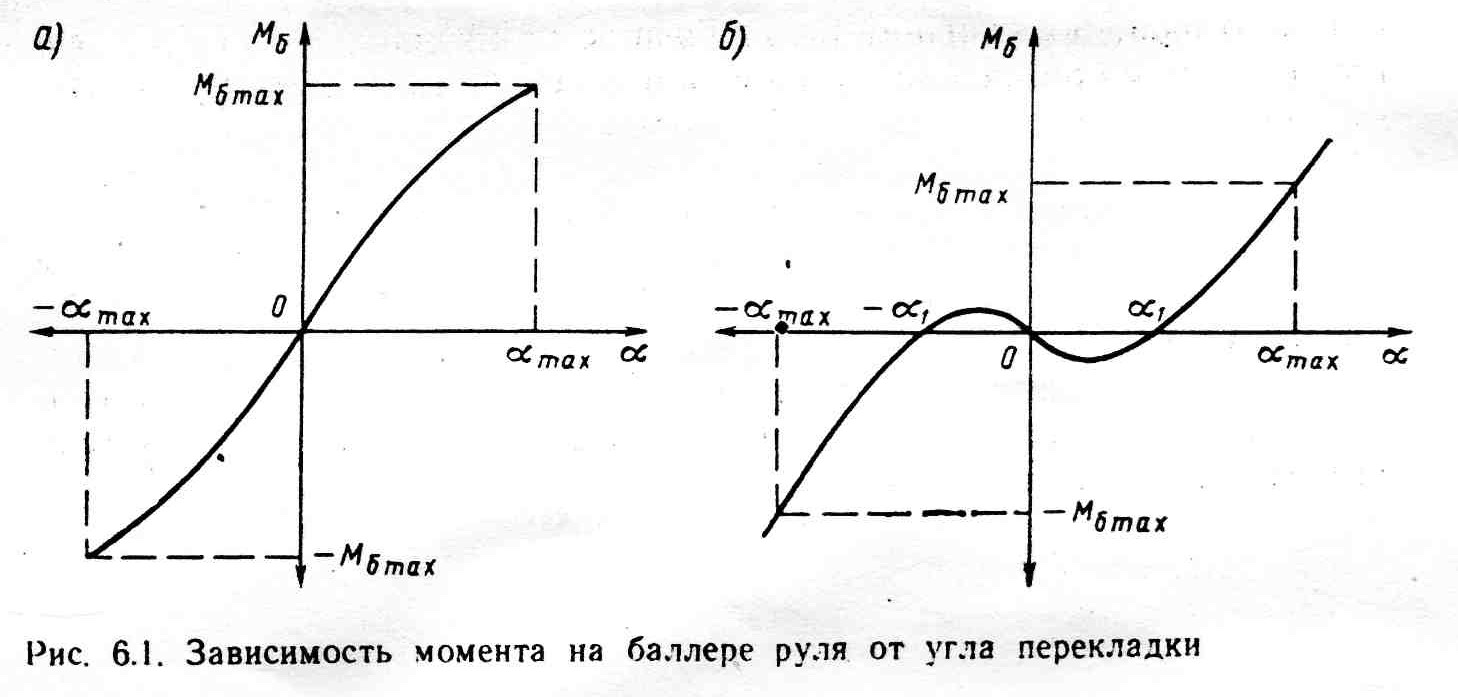
Рис.21.1. Зависимости момента на баллере руля от угла перекладки
отрицательные моменты. Это обстоятельств означает, что для перекладки
балансирного руля не требуется преодолевать сопротивление воды и электропривод может развивать небольшую мощность, необходимую для преодоления сил трения в передачах. Получается значительный выигрыш в
мощности рулевого
привода, тем больший, чем больше угол
![]() .
.
Момент на валу электродвигателя для рулей с механической передачей определяют по известному значению момента на баллере руля.
Для положительных значений момента на баллере, т. е. когда поток воды препятствует повороту пера руля.
![]() ,
,
где — передаточное число механизма;
![]() —
к. п. д. механической
передачи.
—
к. п. д. механической
передачи.
При отрицательном моменте, когда поток воды помогает повороту пера руля, момент на валу электродвигателя
М=![]()
где
![]() —
к. п. д. механической передачи при обратном
ходе пера руля;
—
к. п. д. механической передачи при обратном
ходе пера руля;
=
2 - 1/![]()
В рулевых электроприводах применяют самотормозящиеся механические передачи, препятствующие самопроизвольной перекладке руля под действием давления воды на руль. Такие передачи имеют к. п. д. меньше 0,5, поэтому < 0 и электродвигатель не работает в генераторном режиме, на его валу будет небольшой тормозной момент.
Учитывая
недостаточную точность определения
зависимости момента на баллере от угла
перекладки и коэффициента полезного
действия передачи при проектировании
нагрузочную характеристику электродвигателя
![]() заменяют двумя прямыми отрезками (рис.
6.2).
заменяют двумя прямыми отрезками (рис.
6.2).
Для построения нагрузочной характеристики должны быть известны: максимальное значение момента на валу электродвигателя, которое соответствует максимальному значению момента на баллере,
![]() ;
;
максимальное
значение угла перекладки руля
![]() ,
для балансирных рулей значение угла
,
для балансирных рулей значение угла![]() ,
при котором меняется направление момента
на баллере от потока воды.
,
при котором меняется направление момента
на баллере от потока воды.
Для простых
рулей при перекладке от
до 0 к валу электродвигателя приложен
небольшой момент
![]() (рис.
6.2, а). Этот момент вызван трением в
механических передачах, его значение
по данным эксплуатации составляет (0,1
÷ 0,2)Мmax.
(рис.
6.2, а). Этот момент вызван трением в
механических передачах, его значение
по данным эксплуатации составляет (0,1
÷ 0,2)Мmax.
При перекладке руля от 0 до момент на валу электродвигателя возрастает по закону
М=М0+![]() ,
(6.1)
,
(6.1)
где
![]() — коэффициент, характеризующий наклон
характеристики на этом участке;
— угол перекладки руля, рад.
— коэффициент, характеризующий наклон
характеристики на этом участке;
— угол перекладки руля, рад.
Коэффициент b можно определить следующим образом:
при
=0
М= Мо;
при
![]()
![]() ,
откуда -
,
откуда -
![]()
Решая это уравнение относительно , получаем:
![]()
Подставляя значение в формулу (6.2), находим:
![]()
Для балансирных
рулей первый участок характеристики
продолжается до угла
![]() ,
(рис. 6.2, б) причем момент балансирных
рулей составляет (0,2 ÷ 0,3) Мmax.
Второй участок с возрастающим моментом
находится между углами перекладки
и
,
(рис. 6.2, б) причем момент балансирных
рулей составляет (0,2 ÷ 0,3) Мmax.
Второй участок с возрастающим моментом
находится между углами перекладки
и
![]() .
Воспользовавшись тем же методом, нетрудно
получить уравнение характеристики для
балансирных рулей:
.
Воспользовавшись тем же методом, нетрудно
получить уравнение характеристики для
балансирных рулей:
![]()
![]()
Нагрузочные характеристики необходимы для определения мощности электродвигателя рулевого привода.
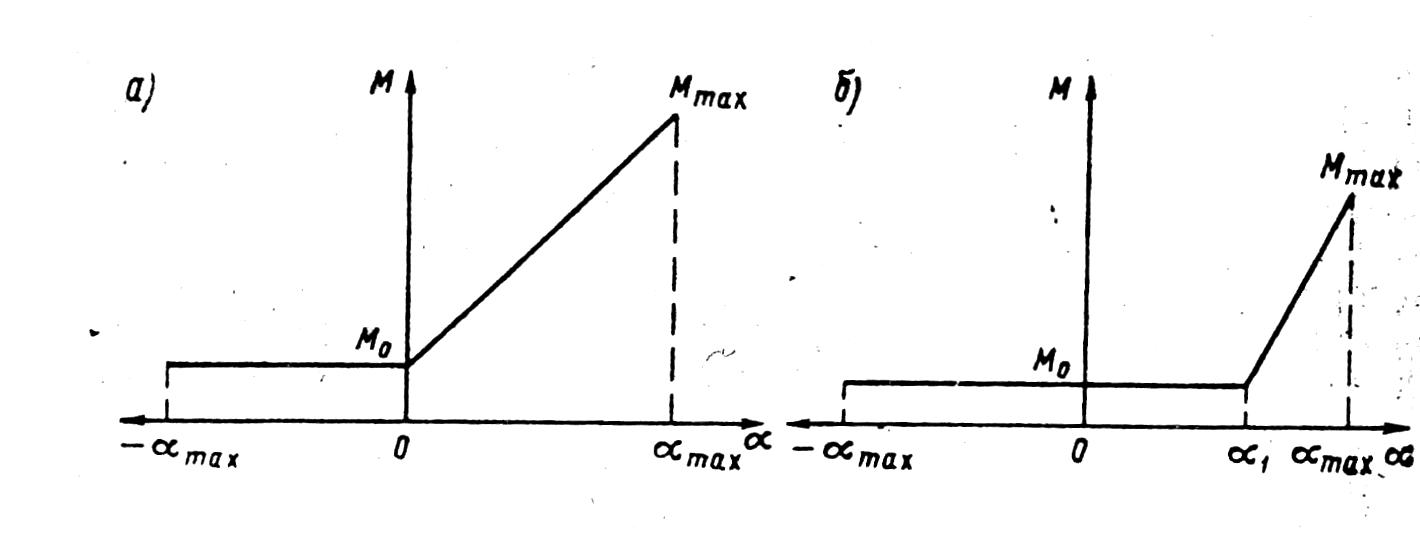
Рис. 6.2. Нагрузочная характеристика электродвигателя рулевого привода
Рис.21.2. Нагрузочные характеристики электродвигателя рулевого привода
При проектировании рулевого электропривода предварительно на основании имеющихся данных о роде тока и напряжении судовой элект- рической сети выбирается тип электродвигателя.
В электромеханическом приводе руля при питании от судовой сети постоянного тока для смягчения механической характеристики двигателя с параллельным возбуждением последовательно с его якорем постоянно включается добавочный резистор. В связи с большой потерей энергии в резисторе двигатели с параллельным возбуждением применяются в рулевых электроприводах небольшой мощности (до 3 кВт) и резервных рулевых электроприводах.
При питании от сети переменного тока используют двигатели постоянного тока с преобразователями. '
При гидравлической передаче применяют электродвигатели с жесткой механической характеристикой. Мощность реверсируемых электродвигателей обычно не превышает 3 кВт. Для более мощных рулевых приводов с гидравлической передачей используют непрерывно вращающиеся нереверсируемые электродвигатели, асинхронные с короткозамкнутым ротором или машины постоянного тока с параллельным возбуждением.
При питании электродвигателей от преобразователя (система Г —Д) применяют электродвигатели постоянного тока с независимым возбуждением или с независимой и последовательной обмотками возбуждения. Смягчение их характеристик достигается автоматическим регулированием режима работы преобразователя.
Рулевые электроприводы могут работать в двух режимах: при ходе судна по курсу, когда электропривод работает с небольшими отклонениями пера руля (3—50) и частыми перекладками (250—350 в час); при маневрах с возможными перекладками руля с борта на борт, следующими одна за другой в течение всего времени маневров (до 30 мин).
При ходе судна по курсу нагрузки на электродвигатель невелики, момент на валу не превышает 20—30 % максимального момента; при манёврах двигатель работает с полной нагрузкой, поэтому мощность двигателя определяют по условию перекладки руля с борта на борт в заданное время, выбранный электродвигатель проверяют на нагревание при указанных режимах.
Приведем расчет мощности электродвигателя постоянного тока с параллельным возбуждением и добавочным резистором в цепи якоря.
Механическую характеристику двигателя можно представить в виде
![]()
или
![]()
где
![]() - частота вращения двигателя при идеальном
холостом ходе;
- частота вращения двигателя при идеальном
холостом ходе;
![]() —
момент при
заторможенном якоре (стояночный).
—
момент при
заторможенном якоре (стояночный).
Асинхронный электродвигатель с фазным ротором и постоянно включенными резисторами, исполнительный электродвигатель системы Г — Д с ненасыщенным генератором и размагничивающей последовательной обмоткой, имеют такую же механическую характеристику, поэтому приводимый расчет может быть использован и для этих двигателей.
Нагрузочная характеристика определяется по формулам (6.3) и рис. 6.2.
Момент стоянки Мк устанавливают по значению Mмах из нагрузочной характеристики с некоторым запасом. Обычно принимают Мк = - (1,3 ÷ 1,5) Мmax.
Частоту вращения электродвигателя при холостом ходе можно определить следующим образом. Пренебрегая временем разгона и торможения ввиду их краткости, можно считать, что полное время перекладки балансирного руля состоит из двух периодов:
![]()
где
![]() ,
— время перекладки руля от
,
— время перекладки руля от
![]() до
,
при постоянном моменте
до
,
при постоянном моменте
![]() ;
;
![]() —
время перекладки
руля от
до
,
для которого момент сил сопротивления
имеет линейную зависимость от угла
перекладки.
—
время перекладки
руля от
до
,
для которого момент сил сопротивления
имеет линейную зависимость от угла
перекладки.
Если
![]() —
частота вращения при моменте, равном
М0,
то из формулы (6.4)
—
частота вращения при моменте, равном
М0,
то из формулы (6.4)
![]() время
перекладки
на угол
время
перекладки
на угол
![]() составит:
составит:
![]()
- передаточное число
В этой формуле углы и измеряют в радианах; появление числа 30 объясняется тем, что измеряется в оборотах в минуту, а время t1 — в секундах.
Подставляя значение в выражение для t1 получим:
![]()
Для определения t2 будем считать, что на втором участке нагрузочной характеристики электродвигатель также работает c постоянным моментом, равным среднему значению между Мо и М mах (см. рис. 6.2):
![]()
а угол перекладки
составляет
![]() ,
тогда
,
тогда
![]() .
.
Подставляя вместо t1 и t2 их значения в выражение полного времени Т, получаем:

откуда определяем пх для балансирного руля:

Значение nх
для простого руля легко получить,
полагая
![]() =
0
=
0

В приведенных формулах нормированное время перекладки руля Т уменьшают на 2—3 с для учета разгона и торможения электродвигателя.
Зная момент стоянки под током Мк и получив частоту вращения двигателя на холостом ходу, легко построить механическую характеристику двигателя, удовлетворяющую требованию перекладки руля с борта на борт за нормированный промежуток времени.
Принимая во
внимание допустимую перегрузочную
способность двигателя по моменту![]() ,
равную 2,5 для двигателей постоянного
тока и 2,3—3,0 для асинхронных двигателей,
и учитывая, что номинальная частота
вращения двигателей меньше частоты
вращения холостого хода на значение
,
равную 2,5 для двигателей постоянного
тока и 2,3—3,0 для асинхронных двигателей,
и учитывая, что номинальная частота
вращения двигателей меньше частоты
вращения холостого хода на значение
![]() ,
,
где
![]() —
статизм естественной характеристики
электродвигателя,
—
статизм естественной характеристики
электродвигателя,
получим мощность двигателя:
![]()
Значение
![]() для
двигателей с параллельным возбуждением
и асинхронных двигателей может быть
принята равной 0,02—0,06.
для
двигателей с параллельным возбуждением
и асинхронных двигателей может быть
принята равной 0,02—0,06.
По номинальным мощности и частоте вращения выбирают двигатель и проверяют на нагревание в наиболее тяжелом режиме работы — при перекладке руля с борта на борт в течение 30 мин.
Проверку производят следующим образом:
определяют эквивалентный момент на валу электродвигателя за время перекладки руля с борта на борт:
![]() ;
;
по каталогу находят
номинальный момент двигателя при
30-минутном режиме работы Мном
30. Если
условие Мэк![]() Мном 30
удовлетворяется, двигатель перегреваться
не будет.
Мном 30
удовлетворяется, двигатель перегреваться
не будет.
Лекция 22
тема занятий: Управление электроприводами электромеханических
рулевых устройств
Вопросы
22.1. Контакторная схема управления рулевой машиной на постоянном токе
22.2. Рулевая машина пассажирского теплохода проекта 588
22.3. Следящая система рулевого электропривода с потенциометрическим управлением
Системы управления рулевых приводов с механической передачей подразделяются на контакторную и систему Г - Д. Выбор той или иной системы управления определяется специальными требованиями, при отсутствии таковых решающим фактором является мощность электропривода.
Контакторная схема управления рулевой машиной на постоянном токе
Схема представлена на плакатах в лаборатории.
Рулевая машина пассажирского теплохода проекта 588
Схема представлена на плакатах в лаборатории.
Следящая система рулевого электропривода с потенциометрическим управлением
Принцип построения систем рулевого электропривода следящего действия заключается в том, что угол перекладки пера руля задаётся постом управления, а электродвигатель рулевого устройства, отработав заданный угол перекладки, автоматически останавливается. Происходит как бы «слежение» электродвигателя рулевого устройства за положением задающего устройства поста управления.
На рис. 22.1 представлена схема рулевого электропривода следящего действия с потенцнометрическим управлением. Схема состоит из приводного двигателя Ml, элсктромашинного усилителя G1, генератора G2 и исполнительного двигателя М2. Двигатель Ml приводит во вращение генератор и ЭМУ, который используется в качестве возбудителя генератора G2. Рулевой электропривод выполнен по системе Г—Д, а ЭМУ имеет две обмотки управления LG1.I, LG1.2 и компенсационную LG1.3. Обмотка возбуждения двигателя LM2 и первая обмотка управления LG1.1 элсктромашпниого усилителя получают питание от независимого источника
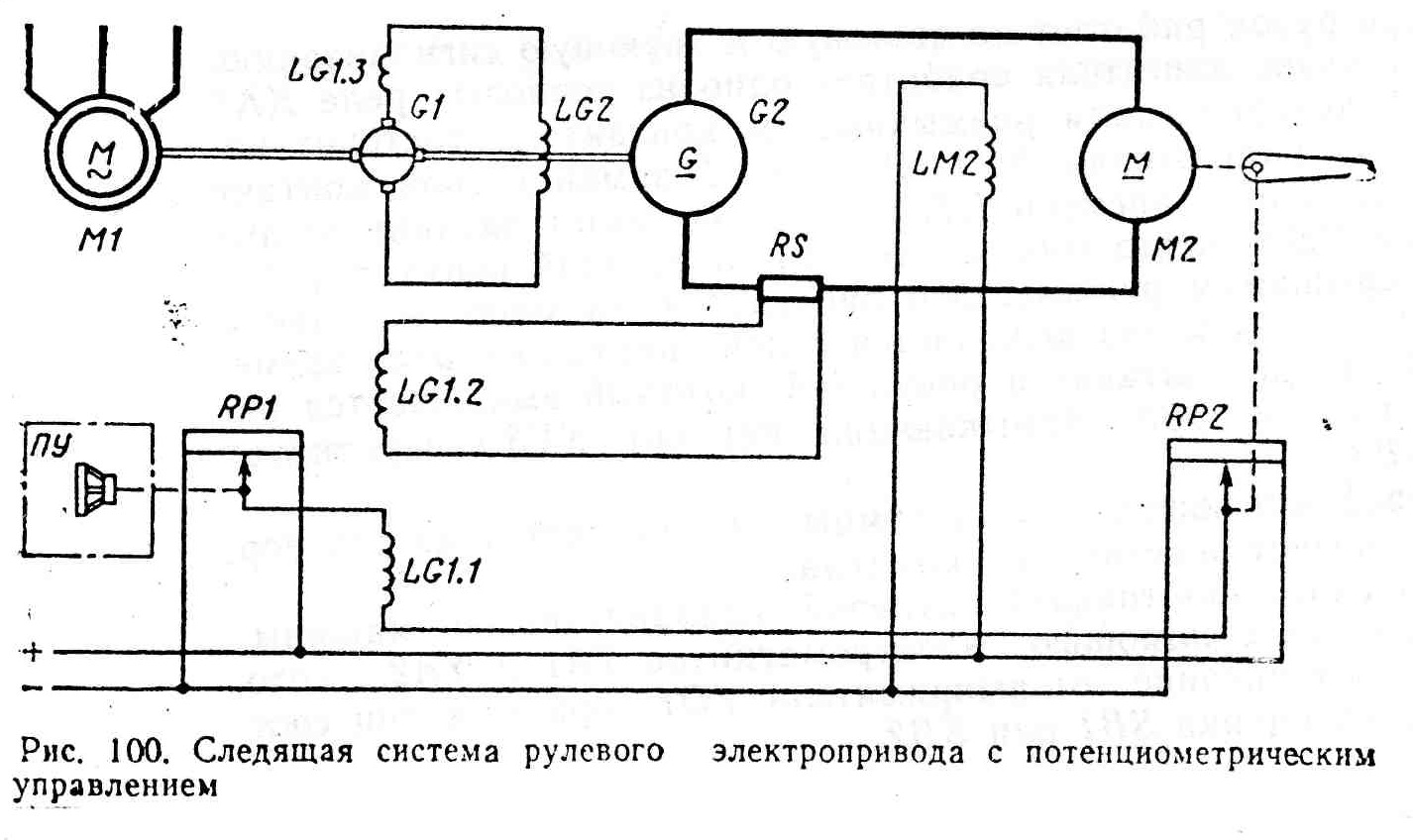 постоянного
тока. Задающее устройство —
потенциометрический датчик RP1 механически
связан с рукояткой поста дистанционного
управления (ПУ), а потенциометр-приемник
RP2 имеет механическую связь с баллером
руля. Обмотка управления LG1.1 включена
в диагональ моста, образованного этими
потенциометрами. Вторая обмотка
управления LG1.2 включена в силовую цепь
через шунт RS. Она выполняет функцию
обратной связи по току нагрузки.
постоянного
тока. Задающее устройство —
потенциометрический датчик RP1 механически
связан с рукояткой поста дистанционного
управления (ПУ), а потенциометр-приемник
RP2 имеет механическую связь с баллером
руля. Обмотка управления LG1.1 включена
в диагональ моста, образованного этими
потенциометрами. Вторая обмотка
управления LG1.2 включена в силовую цепь
через шунт RS. Она выполняет функцию
обратной связи по току нагрузки.
При одинаковом положении ползунков обоих потенциометров потенциалы их контактных щеток равны и по обмотке управления LG1.1 ток не проходит (Iy1 = 0). При переводе рукоятки ПУ в другое положение произойдет и перемещение ползунка потенциометра RP1. Потенциал его контактной щетки изменится в большую или меньшую сторону в зависимости от направления перемещения рукоятки ПУ. В обмотке управления LG1.1 потечет ток. На зажимах ЭМУ появится напряжение, а по обмотке возбуждения генератора LG2 пойдет ток. В результате на зажимах генератора G2 и двигателя М2 появится напряжение. Исполнительный двигатель начнет вращаться, перекладывая руль в заданном направлении.
Рис.22.1.. Следящая система рулевого электропривода с потенциометрическим управлением
Одновременно с поворотом баллера руля перемещается и ползунок потенциометра RP2, приближая потенциал своей контактной щетки к потенциалу контактной щетки потенциометра RP1. Когда потенциалы контактных щеток потенциометров RP1 и RP2 уравняются, прекратится ток в обмотке управления LG1.1. В результате двигатель М2 остановится, выполнив перекладку руля на заданный угол.
Для обеспечения стоянки двигателя под током и предотвращения больших перегрузок обмотка управления LG1.2 включена встречно с задающей обмоткой управления LG1.1. Такое включение обмоток управления ЭМУ позволяет ограничить ток в силовой цепи до допустимых значений.
Лекция 22
тема занятий: Электрогидравлические рулевые приводы
Вопросы
22.1. Определение мощности и выбор электродвигателей приводов
электромеханических рулевых устройств
22.2. Схема электрогидравлического рулевого привода
Определение мощности и выбор электродвигателей приводов
электромеханических рулевых устройств
Электрогидравлические рулевые приводы благодаря своей компактности все шире применяются на судах речного флота. Принцип действия электрогидравлических приводов заключается в создании давления жидкости на поршни, связанные с баллером руля.
Мощность электродвигателя для рулевых устройств с гидравлической передачей и насосом постоянной подачи определяют также, как и для рулевых приводов с механической передачей.
В электроприводах с насосами переменной подачи мощность электродвигателя устанавливают по мощности насоса. Из кинематической схемы привода (рис. 22.1)
![]() ,
,
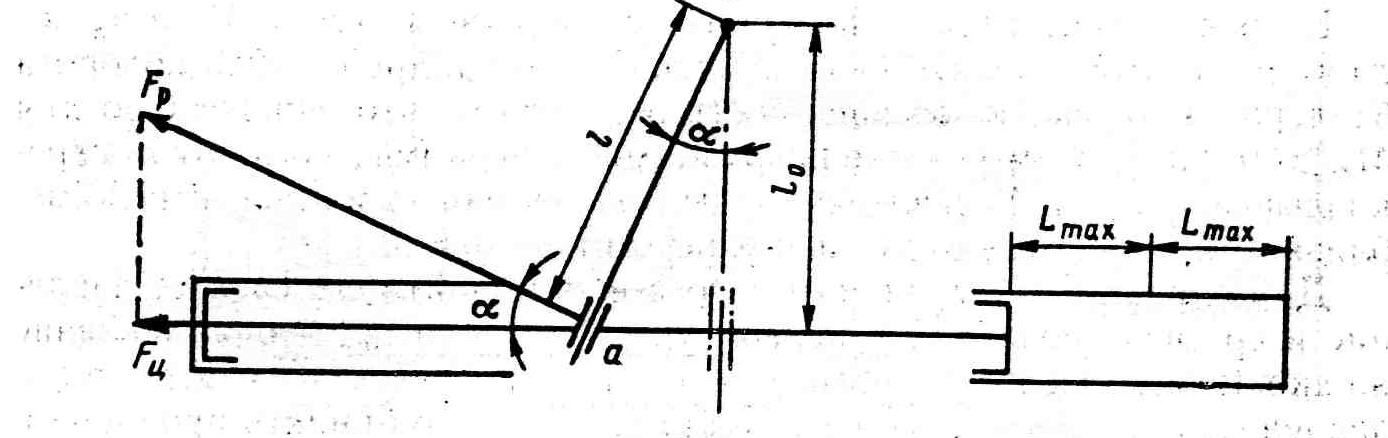
Рис.22.1. Кинематическая схема плунжерного гидравлического
рулевого привода.
где
![]() — сила, приложенная к шарниру и
перпендикулярная румпелю;
— сила, приложенная к шарниру и
перпендикулярная румпелю;
![]() изменяющееся
расстояние от оси баллера до центра
шарнира;
изменяющееся
расстояние от оси баллера до центра
шарнира;
![]() к.п.д. учитывающий
потери на трение в сальнике и подшипниках
баллера и шарнира
к.п.д. учитывающий
потери на трение в сальнике и подшипниках
баллера и шарнира
![]() .
.
Сила Fр создается силой Fц, направленной вдоль оси цилиндра,
Fр = Fц /cos .
Плечо силы
![]() выражается через расстояние oт
оси цилиндров до_оси баллера руля
выражается через расстояние oт
оси цилиндров до_оси баллера руля
![]() формулой
формулой
![]() .
.
тогда
![]()
Эту силу, а также силу, вызванную противодавлением в системе трубопроводов, трением плунжеров о стенки цилиндра и сальниковую набивку FT, должна преодолевать сила давления жидкости в цилиндрах привода
F=Fц+Fт
Экспериментально
установлено, что сила Fт
пропорциональна
силе давления жидкости FT
=
![]() F.
Коэффициент пропорциональности
по опытным данным составляет 0.04—0,06.
F.
Коэффициент пропорциональности
по опытным данным составляет 0.04—0,06.
Задаваясь значением , легко получить зависимость между силами F и Fц:
![]()
Сила F пропорциональна давлению в цилиндре и площади плунжера:
![]() ,
,
где р — давление жидкости;
D — диаметр плунжера.
Отсюда давление жидкости
![]()
В правой части
этого выражения все величины, кроме М6
и а, постоянны, поэтому зависимость
давления в цилиндре р от угла поворота
баллера такая же, как зависимость МB
=![]() (
),
что справедливо для Мб
> 0. На первом участке нагрузочной
диаграммы, когда руль перекладывается
силой давления воды, двигатель работает
в режиме, близком к холостому ходу, и
можно считать
(
),
что справедливо для Мб
> 0. На первом участке нагрузочной
диаграммы, когда руль перекладывается
силой давления воды, двигатель работает
в режиме, близком к холостому ходу, и
можно считать
![]() .
.
Для определения
мощности насоса нужно найти его среднее
давление и среднюю подачу. На первом
участке от —
maх
до
![]() 1
давление жидкости может быть принято
=
0. На втором участке от
1
до
maх
давление, так же как и момент на баллере,
можно принять пропорциональным углу
перекладки.
1
давление жидкости может быть принято
=
0. На втором участке от
1
до
maх
давление, так же как и момент на баллере,
можно принять пропорциональным углу
перекладки.
Максимальное давление жидкости в цилиндре соответствует максимальному моменту на баллере:
![]()
Средняя подача насоса за время Т перекладки руля с борта на борт
Qср=V/T,
где V-объем жидкости, перекачиваемой насосом за это время.
Объем перекачиваемой жидкости
![]()
так как согласно схеме, приведенной на рис. 6.6, .
Lmax
=
![]()
Максимальная мощность насоса Pн max = max Qcp
и мощность электродвигателя
![]() ,
,
где — общий к. п. д. насоса.
Номинальная
мощность двигателя с учетом его
перегрузочной способ-ности
![]() Рном=Рмах/
.
Рном=Рмах/
.
Рулевой электропривод с плунжерной гидравлической передачей (рис. 22.2) состоит из электродвигателя 1, насоса 2, гидравлических цилиндров 3.
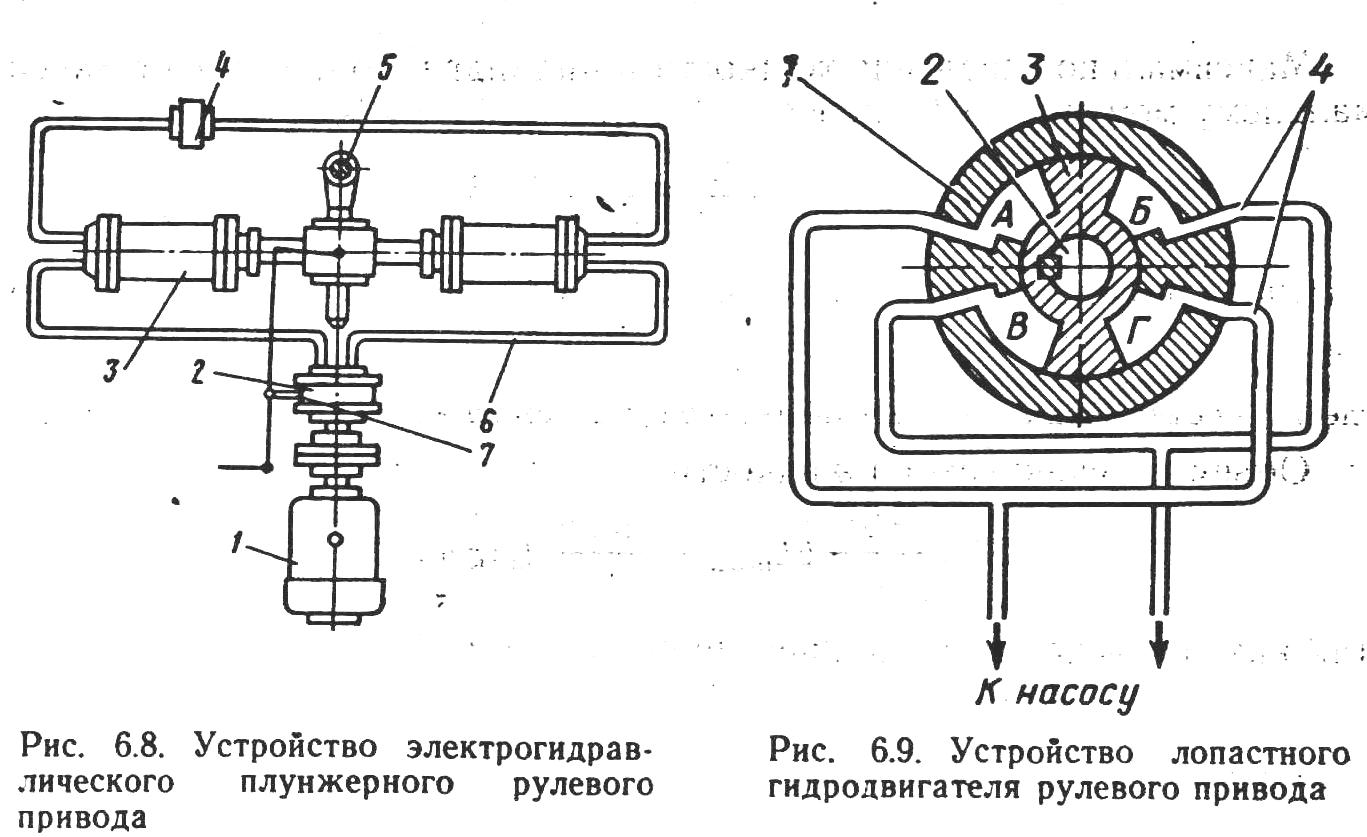
Рис. 22.2. Устройство электрогидрав- Рис.22.3. Устройство лопастного лического плунжерного рулевого гидравлического рулевого
привода привода
Принцип действия передачи с насосом переменной подачи состоит в следующем. При нейтральном положении манипулятора 7 насос работает вхолостую, не вызывая нагнетания рабочей жидкости ни в правую, ни в левую ветвь трубопровода 6. При этом баллер руля 5 остается неподвижным.
Отклонение манипулятора в ту или иную сторону вызывает нагнетание рабочей жидкости в соответствующий гидравлический цилиндр 3 и отсасывание ее из противоположного цилиндра. Благодаря этому плунжеры цилиндров начнут перемещаться и поворачивать румпель 5 в заданную сторону.
Движение плунжеров будет продолжаться до тех пор, пока манипулятор не возвратится в нейтральное положение, при котором давление в цилиндрах станет одинаковым. Во избежание чрезмерного повышения давления в рабочих цилиндрах в случае заклинивания рулевого привода устанавливают предохранительный перепускной клапан 4, автоматически открывающийся при давлении жидкости, превышающем рабочее на 10-15 %.
Наряду с плунжерным рулевым приводом применяют лопастной
(рис.22.3). В корпусе гидродвигателя 1 на баллере руля 2 устанавливают лопасти 3.
При нейтральном положении кольца 4 его центр совпадает с центром звезды 1, поэтому поршни 2 остаются неподвижными относительно цилиндров звезды. Насос работает вхолостую. При сдвиге кольца 4 вправо поршни, движущиеся в верхней его части, будут отходить от центра звезды и вызывать всасывание жидкости, а поршни в нижней части будут приближаться к её центру, нагнетая жидкость в нижнюю полость. Таким образом, жидкость из верхней полости будет перекачиваться в нижнюю и по трубопроводу в соответствующий цилиндр 3 рулевого привода.
При сдвиге кольца влево жидкость будет перекачиваться из нижней полости в верхнюю.
Насос переменной подачи приводится во вращение асинхронным электродвигателем с короткозамкнутым ротором. Отсутствие частых пусков и реверсов электродвигателя позволяет устанавливать электрические машины меньших габаритных размеров и мощности. В качестве рабочей жидкости в электрогидравлических рулевых приводах применяют специальные минеральные масла.
Схема электрогидравлического рулевого привода
Электрогидравлический рулевой привод имеет ряд преимуществ по сравнению с электромеханическим. Основными из них являются: более высокий к. п. д.; меньшая установленная мощность; возможность использования нерегулируемого электропривода с асинхронным короткозамкнутым двигателем; меньшие массы и габариты электрооборудования.
На рис. 22.4 показана одна из возможных схем электропривода насоса рулевой гидравлической машины. Пуск электродвигателя М можно осуществить с местного поста, установив для этого переключатель SA1 в положение 2 или дистанционно из ходовой рубки переводом переключателя SA1 в положение 1 с замыканием выключателя SA2 поста управления. При этом получает питание линейный контактор КМ, который своими замыкающими контактами в силовой цепи подключает двигатель к сети. Максимальная защита двигателя от короткого замыкания осуществляется автоматическим выключателем QF. Защита двигателя от перегрузок работает на световую и звуковую сигнализацию. При перегрузке двигателя сработает одно из тепловых реле KK1 или КК.2, которое своим размыкающим
контактом обесточит катушку реле напряжения KV1. Реле KV1 замкнет свой
контакт KV1.1 в цепи реле времени КТ, которое получает питание от выпрямителя VD2 через собственный размыкающий контакт, работая в прерывистом режиме. Это приведет к миганию сигнальной лампы HL, так как она включается в цепь контактом реле времени ДТ. Получает питание и
Р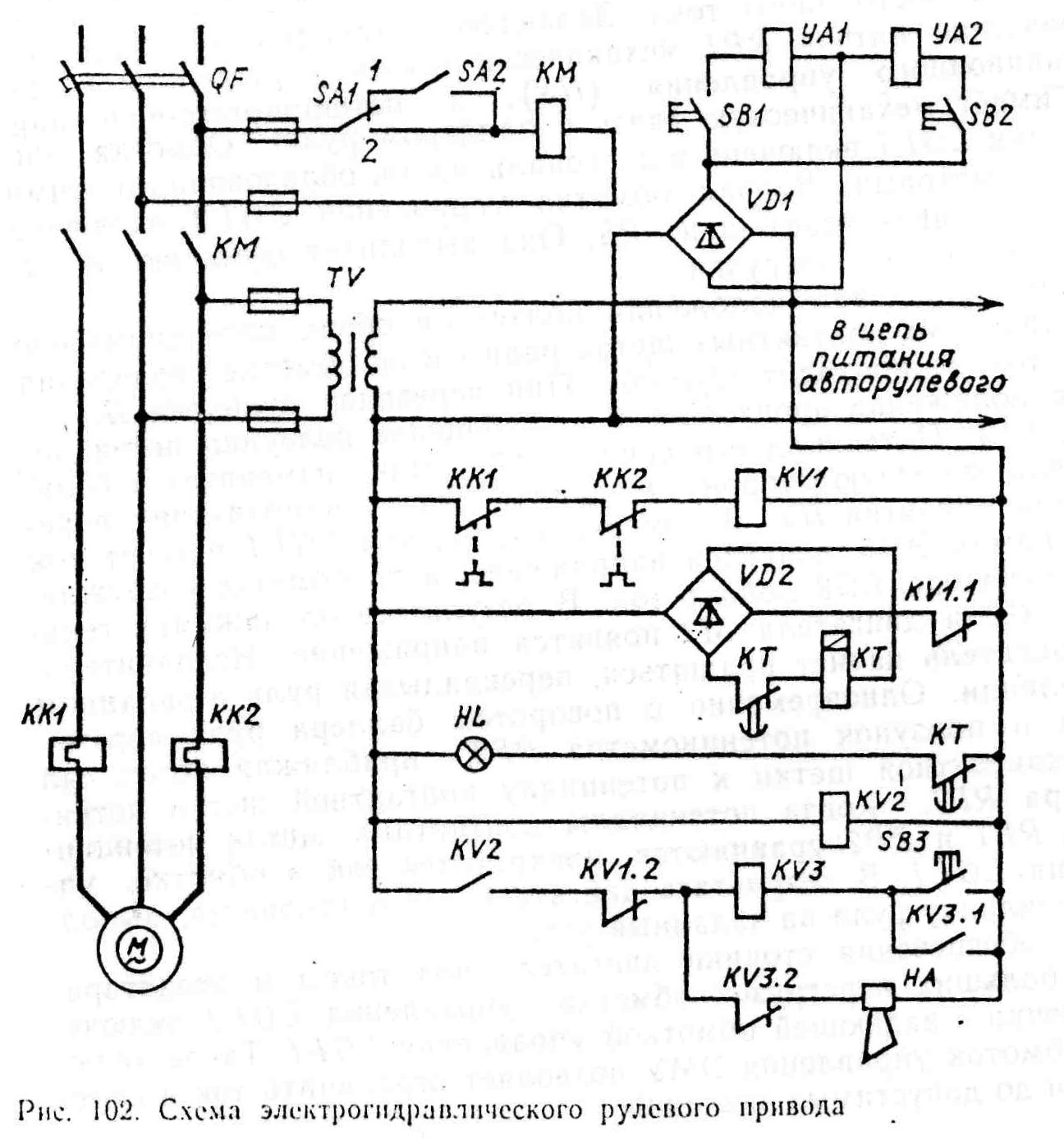 ис.22.4.
Схема электрогидравлического рулевого
привода.
ис.22.4.
Схема электрогидравлического рулевого
привода.
ревун НА, который выключается нажатием кнопки SB3. Замыкающий контакт KV3.1 шунтирует кнопку SВ3.
Световой мигающий сигнал лампы HL останется до тех пор, пока не исчезнет перегрузка двигателя.
Управление золтниками рулевой гидравлической машины осуществляется с помощью электромагнитов YA1 и YA2, которые получают питание от выпрямителя VD1 при нажатии соответствующей кнопки SB1 или SB2.