

СОДЕРЖАНИЕ
Введение
Техническое задание
Структурный анализ механизма 6
Построение планов положения механизма 9
Построение планов скоростей 11
Построение плана ускорения 13
Силовой анализ механизма 15
Расчет ведущего звена 18
Синтез зубчатого механизма 21
Параметры инструментальной рейки 24
Порядок вычерчивания зацепления 2-х зубчатых 25
Планетарные передачи 26
Заключение
Введение
Цель курсового проекта получение навыков использования общих методов проектирования и исследования механизмов для создания конкретных машин и приборов разнообразных назначений. В процессе выполнения курсового проекта необходимо научиться выполнять расчеты, применять, как аналитически, так и графически. Методы решения инженерных задач на различных этапах.
Объектом исследования в курсовой работе является синусный механизм и зубчатый механизм.
Задачами курсовой работы является провести кинетоскопический анализ зубчатого механизма и синусного механизма. В процессе этого анализа Необходимо построение 8 планов скоростей и ускорений, выполнить структурный анализ механизма и силовой анализ механизма с построением рычага Жуковского, также необходимо выполнить синтез зубчатого механизма и вычертить зацепление двух зубчатых колес с проведением всех необходимых расчетов.
Курс теории машин и механизмов подготавливает к изучению специальных дисциплин, посвященных проектированию машин и приборов отдельных отраслей техники
Техническое задание
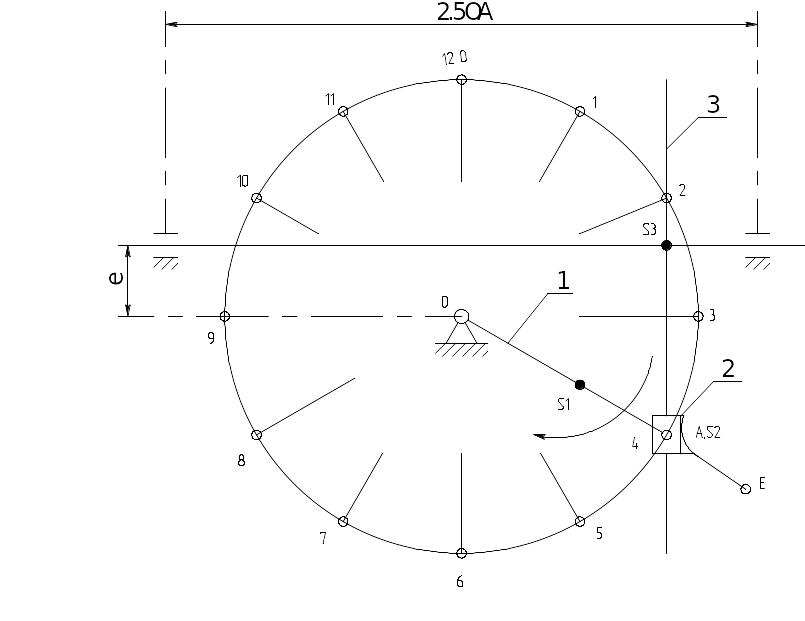
Вариант6. Схема синусного механизма
-
Величина
L
OA, мм
50
e, мм
10
AE, мм
20

20
1 Структурный анализ механизма
1.1 Исходная структурная схема механизма:

Рис. 1
1.2 Определяем степень подвижности механизма по формуле Чебышева:
W= 3n – 2 p5 – p4
где n – число подвижных звеньев механизма. В нашем случае 3 подвижных звена (1,2,3);
p5 - число кинематических пар 5 –го класса. В нашем случае все кинематические пары вращательные в точках О, А, В, их количество p5 = 4 ;
p4 – число кинематических пар 4 – го класса. В нашем случае они отсутствуют.
W= 3n – 2 p5 – p4 = 3 × 3 - 2 × 4 =1
Следовательно, в данном механизме ведущим звеном является одно звено. Примем в качестве ведущего звена, звено 1.
1.3 Отсоединяем от исходного механизма группу Ассура, состоящая только из 2 звеньев, наиболее удаленную от ведущего звена. Вычерчиваем их отдельно от механизма.

Рис.2
Определим степень подвижности выделенной группы Ассура по формуле Чебышева
W= 3n – 2 p5 – p4 = 3 × 2 - 2 × 3 =0
Отсюда следует, что мы верно определили группу Ассура. Выделенная группа Ассура относится ко второму классу, имеет второй порядок и пятый вид.
1.4 Определяем степень подвижности оставшейся части механизма по формуле Чебышева:

Рис.3
W= 3n – 2 p5 – p4 = 3 × 1 - 2 × 1 =1
Так как полученное значение подвижности совпадет с ранее найденным значением (см. п. 1.2), то структурный анализ механизма выполнен правильно. Ведущее звено относится к механизму первого класса.
1.5 Запишем структурную формулу строения исходного механизма

Вывод: т.к. в состав исходного механизма входит группа Ассура I класса, то механизм относится к первого классу.