

4.1.6. Апріорна інформація
Апріорною інформацією називають інформацію, яку необхідно зібрати, опрацювати і ввести в ЕОМ, щоб можна було розв'язати задачу аналізу ТС при допустимих машинних ресурсах або зменшити вимоги до них. Розглянемо визначення апріорної інформації на конкретних прикладах.
Приклад 4.3. Розв'язування системи кінцевих рівнянь. У багатьох випадках обчислення, які пов'язані з аналізом ТС на ЕОМ, вимагають розв'язування системи кінцевих (алгебраїчних або трансцендентних) рівнянь:
(4.4)
{/і(хьхь...,х1)=0, або у векторній формі
/(Х) = 0. (4.5)
Деякі обчислювальні алгоритми дають змогу розрахувати корінь
137
о--
лише тоді, коли в машину введено певне достатньо близьке до у значення вектора Хо.
Інші алгоритми приводять до розв'язку системи (4.4) або (4 ^\ • тоді, коли про Хо нічого не відомо, однак значення Х0 дає змо суттєво прискорити розрахунок кореня. Зрозуміло, що визначенн Хо природно інтерпретувати як знаходження апріорної інформації
А
Інколи передбачувані значення Хц практично невідомі, тоді необхідно говорити про цілу, достатньо протяжну область О V
просторі координат Х\^,х2^, >ХЮ> У якій повинна знаходитися
необхідна для розв'язку системи (4.4) точка. В такій ситуації апріорною інформацією є, очевидно, опис області Сх.
Приклад 4.4. Розрахунок періодичних режимів руху ТС. Аналіз ряду ТС пов'язаний із властивістю періодичності їх руху. Ця властивість інколи визначає робочий режим функціонування системи (періодичні коливання механічних систем і машин), а інколи пов'язана з порушенням робочого режиму. Дослідження властивості періодичності зводиться до знаходження умов, при яких існують або завідомо відсутні періодичні розв'язки деяких рівнянь, що входять в опис системи. Найчастіше необхідно знайти і самі розв'язки, хоча б наближено.
Нехай опис системи зведено до системи звичайних диференціальних рівнянь у так званій нормальній формі Коші:
.., х1,иь и2,..., ит);
,(4.6)
= <Рі(і,хь х2,..., хьиьи2,..., ит)
або у векторній формі
де / - час; ІДУ) = {Ні,«2'--->ит} ' вект°Р вхідних Д#; Х(і)= —{хі, х2, •..,*/} - вектор стану системи, який необхідно
знайти в результаті розв'язування системи (4.6) або (4.7).
Для багатьох технічних систем з періодичності функцій ), ...,Х[(і) випливає періодичність відгуків системи
138
(і),..., Уп^)- У таких випадках задача зводиться, по суті, до зна-одокення періодичних розв'яків для Х(ї). Тепер вияснимо, яку роль тут відіграє апріорна інформація.
Добре відомо, що розв'язок Х(ґ) для системи (4.6) визначається початковими умовами Х(0), тобто сукупністю (Хі(0)>'-ч-х;/(0)Ь Може статися так, що в просторі координат хА0),--->хіФ) існує область Сх, яка відрізняється такою властивістю: якщо Х(0) належить Сх, то розв'язок виявляється періодичним, у протилежному випадку розв'язок Х(ї) завжди неперіодичний. У більшості технічних систем область Сх не збігається з усім простором, а обмежена. Більше того, область О х може бути досить складною й заплутаною. Якщо розраховувати періодичні розв'язки і, як наслідок цього, періодичні режими руху технічної системи для певних початкових умов, то знання області Сх цілком необхідне. В іншому випадку область Ох довелось би шукати в рамках деякої процедури, що, звичайно, вимагало б допоміжних машинних ресурсів. Таким чином, розрахунок області С х є знаходженням необхідної апріорної інформації.
В обох розглянутих нами прикладах метою збирання й обробки апріорної інформації є визначення області Ох у якомусь просторі. Відносно області С нас можуть цікавити два питання: 1) чи дійсно всі точки цієї області мають необхідні нам властивості (наприклад, чи з усіх її точок починаються траєкторії, що приводять до періодичних рухів); 2) наскільки тісно область О облягає ту область, яка тільки і має розглянуту властивість.
Розглянемо три випадки, які показано на рис 4.2. Для простоти ми обмежимось областями на площині, тобто вважаємо, що вектори X двомірні.
На рис. 4.2 кружечками відмічено ті точки області О, які дають періодичні режими руху технічній системі.
139
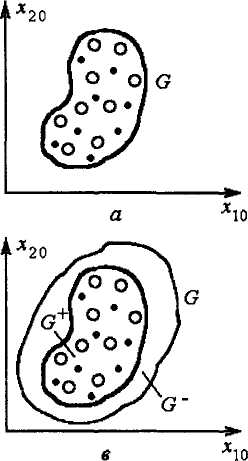
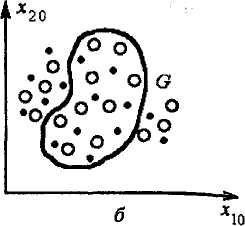
Рис. 4.2. Область О початкових умов, що забезпечують існування заданих властивостей (періодичнихрежимів руху) технічної системи
Ситуація, що показана на рис. 4.2, а, відповідає ідеальному випадку: область С складається тільки з точок, які з максимальною точністю і повнотою описують апріорну інформацію. На рис. 4.2, б область О складається з точок, які не повністю описують апріорну інформацію, бо за межами області О є точки, які задовольняють початкові умови для циклічних режимів руху технічної системи. Область С повинна була б бути більш повною, ніж на рис. 4.2, б. Однак нам це невідомо, і, можливо, повна межа області визначиться лише після розрахунків на ЕОМ. Третій можливий випадок показано на рис 4.2, в. Тут область С охоплює не тільки бажані точки (вони утворюють область С +), але і зайві (область С~). Очевидно , почавши розрахунки з точок, котрі належать області С~~, ми не отримаємо бажаного результату. В цьому випадку наша апріорна інформація неточна.
З розглянутого прикладу можна зробити висновок, ш° існують два небажаних випадки опису апріорної інформації на стадії попереднього дослідження системи: неповнота (рис. 4.2, 6) і неточність (рис. 4.2, в). Кількісна оцінка цих факторів можлива лише ймовірнісними методами. Наприклад, можна оцінити ймовірність ситуації, яка подібна тій, що показана на рис. 4.2, б, або оцінитй
140
 статистичні
характеристики випадкових величин, що
характеризують
область С-.
статистичні
характеристики випадкових величин, що
характеризують
область С-.
Жорсткі рекомендацій до вибору апріорної інформації в тому чи іншому вигляді (рис. 4.2) дати практично неможливо. Для випадку, показаному на рис. 4.2, а, необхідні значні витрати ресурсів на підготовку апріорної інформації, але при цьому значно зменшуються витрати на обчислювальні операції. У випадках (рис.4.2, 6, в), навпаки, зменшуються витрати на підготовку апріорної інформації, зате збільшуються витрати на обчислювальні операції. При цьому співвідношення між одними і другими витратами значною мірою залежать від точності визначення області С, яка може бути звуженою або розширеною.
4.1.7. Приклад машинного аналізу технічної системи
Розглянемо структуру процесу машинного аналізу на прикладі розрахунку періодичних коливань технічної системи. Припустимо, що розв'язок системи (4.7) при вибраних нами початкових умовах належить області Сх і є неперіодичним. У процесі діалогу з ЕОМ дослідник у завчасно визначених ним точках осі і буде отримувати інформацію про розв'язок Х(і) та його періодичність. При наявності цієї інформації неперіодичність процесу руху механічної системи можлива в двох випадках: 1) розв'язок в дійсності неперіодичний; 2) розв'язок періодичний, але розрахунок перехідного процесу ще не закінчено. Вияснити причину неперіодичності процесу дослідник може декількома шляхами.
1. Спинити процес обчислень через деякий час і тим самим внести певний вклад у задачу аналізу — визначити властивості системи. Прийняттю такого рішення може сприяти апріорна інформація іншого характеру, ніж та, яку пов'язували з областю Сх. Такою інформацією може бути час установлення періодичного режиму руху механічної системи (д. Якщо за апріорними даними час установлення періодичності руху повинен бути певної величини, а розрахунковий відрізок процесу складає до моменту прийняття рішення значно більшу величину часу, то рішення про спинення обчислювального процесу є виправданим. Однак при цьому задача
141
аналізу з розрахунку періодичності руху механічної системи зал шається невиконаною.
Продовжувати процес обчислень, щоб з'ясувати, чи встан виться в подальшому періодичний режим руху. При цьому тако можна використати допоміжну апріорну інформацію.
Частково спинити процес обчислень і перевірити достатність описової й апріорної інформації. Може бути, що апріорНот інформації достатньо, а описової — недостатньо або навпаки. Може статися так, що необхідно уточнити апріорну інформацію, наприк лад, величину ід. Ця величина може виявитися випадковою. Ми вважаємо, що технічна система і зовнішні дії на неї детерміновані тому й ід повинно бути детермінованим числом. Однак, якщо сис тема складна та інформація про ід апріорна, то визначити величину ід з достатньою точністю неможливо. Використовуючи будь-який метод оцінки, вдається визначити лише діапазон, у якому з певною ймовірністю повинна знаходитися величина ід.
4.2. Синтез технічних систем 4.2.1. Суть задачі синтезу технічної системи
Постановка задачі синтезу певною мірою зворотна постановці задачі аналізу. В процесі синтезу задаються описи вхідних дій і описи поведінки, характеристики й властивості майбутньої системи. Досить часто в описи поведінки системи входять описи виходів. Ці описи або їх частина в аналізі не задавались, а шукалися. В задачі синтезу необхідно знайти опис самої системи та її стани, в той час як у задачі аналізу опис системи заданий. Таким чином, розв'язування задачі синтезу являє собою процес перетворення одних описів в інші. Ця задача аналогічна задачі аналізу, тільки вхідні і вихідні описи тут інші й сам процес перетворень описів також інший. Саме ці принци-пові різниці роблять процес синтезу більш творчим, де головну роль відіграє кваліфікований спеціаліст, якого не може замінити ніяка сукупність обчислювальних засобів. Однак нерозумно завантажувати спеціаліста громіздкою одноманітною інформацією, яка не вимагає творчих здібностей та інтуїції. Тому в процесі синтезу технічних систем бажано організувати взаємодію людини й ЕОМ.
У процесі синтезу технічних систем центральне місце займають проблеми вибору структури системи і базисних елементів. Ці
142
бл в багатьох задачах дуже погано формалізуються та алгоритмізуються. Саме тут повинна проявлятися творча сила людського інтелекту, його вміння користуватися інтуїцією, досвідом розв'язування подібних або суттєво інших задач і т. д.
Одним із шляхів синтезу технічних систем є вибір певної структури й базисних елементів і на основі розв'язування задачі аналізу здійснення зондування параметрів системи та вибір таких з них, які задовольняють бажані властивості системи. Якщо аналіз направле-ллй, то його можна будувати таким чином, щоб наблизитися до бажаних властивостей системи. Так чи інакше нам удається встановити залежність між характеристиками властивостей системи і параметрами її базисних елементів.
На перший погляд здається, що такий підхід досить простий. Однак в дійсності нам не зовсім зрозуміло, яку саме систему необхідно аналізувати. Система тільки створюється, і її опис нам необхідно знайти, тоді як для задачі аналізу він повинен бути відомим. Так ми стикаємося з основним протиріччям задачі синтезу, яке принципово усунути неможливо. Створення системи вимагає інформації про її поведінку, характеристики та властивості, а саму систему ще треба відшукати. Раніше, ніж опис системи буде знайдено, цю інформацію неможливо отримати, а не знаючи її, неможливо створити систему.
Основне протиріччя процесу синтезу пов'язане й з іншими, також достатньо суттєвими причинами. їх можна охарактеризувати таким чином: створити систему вдається лише тоді, коли ми знаємо, яку систему ми хочемо створити. Однак це знання приходить лише в процесі знаходження необхідної нам системи і, по суті, багато питань залишаються неясними і після того, як опис системи знайдено, а сама вона реалізована. Бувають випадки, коли постановка задачі синтезу виявляється лише після досить довгої екплуатації системи, тобто коли сама проблема синтезу, можливо, вже не викликає інтересу. Для підтвердження цієї думки розглянемо приклад.
Приклад 4.5. Нехай створюється деяка механічна система, для якої основним робочим режимом є коливальний процес. Діапазон частот цього процесу відомий ще до початку проектування, інші початкові дані також не викликають сумніву. Після того, як задача синтезу була розв'язана і було знайдено опис механічної системи, здійснили її дослідження. В результаті було встановлено, що поряд із коливаннями в заданому частотному діапазоні система здійснює паразитні" коливання, спектр яких знаходиться поза цим
к 143
діапазоном і які недопустимі з точки зору нормальної експлуатя - системи (можуть зруйнувати систему, впливають на її взаємодц^ іншими системами тощо). 3
У результаті розгляду цього прикладу виникає питання-розв'язали ми задачу синтезу чи не розв'язали. Якщо під розв'язко проблеми синтезу розуміти знаходження будь-якої системи, що За довольняє початкові вимоги, то ми, звичайно, розв'язали зада^ Але якщо мета проектування становить знаходження опису Ме^ ханічної системи, що задовольняє її ефективне функціонування, то проблема залишилась нерозв'язаною. Протиріччя полягає в тому що виконати формально описані умови ще не означає задовольнити "істинні" умови синтезу.
З розглянутого прикладу видно, що вимогу відсутності паразитних коливань необхідно було включити в постановку задачі синтезу. Однак важливість цієї умови стала очевидною лише після проведення аналізу створеної механічної системи. До цього інженер, який формулював задачу, не підозрював про можливість виникнення небажаних процесів. Необхідно зауважити, що при невдалому проведенні аналізу він міг не зафіксувати небажані ефекти і на наступній стадії розробки системи.
Досвід створення складних технічних систем показує, що на початку процесу синтезу неможливо формалізувати всі умови, щоб вважати систему задовільною або, тим більше, найкращою з можливих. Визначеність у заданні вимог приходить лише з розумінням поведінки, характеристик і властивостей системи — тієї самої системи, опис якої невідомий та який необхідно знайти. Звичайно, ці протиріччя майже не проявляються у випадку нескладних систем, поведінка, характеристики й властивості яких по суті легко передбачувані, хоча б якісно.
Зрозуміло, якщо процес синтезу завершено, то описане вище протиріччя повинно бути рано чи пізно усунутим. Знімається воно одноразовим або багаторазовим звертанням до процесу аналізу та оцінкою його результатів. Таким чином, аналіз виступає основним засобом для зняття протиріччя, що виникає в процесі синтезу технічних систем.
Принципові труднощі процесу синтезу — незнання того, ш° можливе і що неможливе в створюваній системі, і невміння формалізувати побажання проектувальника — можуть бути зняті, якщо проаналізувати деякий варіант системи. Виходячи з цього, можна запропонувати таку структуру процесу:
144
1. Розоробити варіант опису технічної системи, який задоволь- е початкові вимоги синтезу.
Провести ґрунтовний аналіз запропонованої системи. На цьому етапі розробити варіант опису технічної системи, який задо вольняє початкові вимоги синтезу.
Провести ґрунтовний аналіз запропонованої системи. На цьому етапі бажано використати ЕОМ.
Оцінити переваги запропонованої системи на основі отри маної інформації про її поведінку, характеристики і властивості.
Якщо система задовольняє необхідні вимоги або, тим більше, є найкращою із усіх можливих, то процес синтезу необхідно закінчити, а якщо — ні, то повернутися до першого пункту. Така структура синтезу дає змогу людині й ЕОМ робити те, що у кожного з них виходить найкраще. Пропонування ідей, формування гіпотез, оцінка — все, що вимагає неформального, творчого підходу, залишається за людиною. Все, що краще алгоритмізується, в основному виконується ЕОМ. Але справа не тільки в цьому. Кожний вдалий крок в описаній вище ітеративній, циклічній процедурі дає можливість що-небудь нове зрозуміти в системі, яка створюється: поступово визначаються межі можливого і неможливого, виявляються недооцінені або непомічені небезпечності, формалізуються цілі синтезу й ін. Таким чином, крок за кроком усуваються перешкоди, знімаються протиріччя.
Описана структура процесу синтезу є лише основою складного, розгалуженого процесу. Наприклад, задання опису системи вимагає задання структури, базису елементів і параметрів. Чи дає виявлення всіх цих компонентів можливість запропонувати варіант опису системи ? Здебільшого — ні. В усякому разі, визначення параметрів системи людина виконує гірше, ніж на ЕОМ. Розрахунок параметрів часто вдається представити у вигляді стрункого алгоритму, який допускає ефективне використання ЕОМ. Тоді за людиною залишається творча робота, а отримані під час цієї роботи результати опису системи доповнюються чисельною інформацією від ЕОМ.
Звернемось до прикладу 4.2, який описано вище. Задання опи-СУ колони доцільно звести до вибору самої структури (рис. 4.1) і визначення базису елементів, тобто набору форм поперечних пе-
РерІЗІВ КОЖНОГО 3 елементів. Що СТОСУЄТЬСЯ ВИЗНаЧеННЯ ЧИСеЛ 5}, ТО
Цей розрахунок швидше і точніше виконає ЕОМ. До того ж, подібні Розрахунки можна підпорядкувати різним вимогам, наприклад по-
145
старатися підібрати 5г- таким чином, щоб колона мала (при задат, структурі і базисі) мінімальну вагу. Іншим важливим моментом розглянутій процедурі синтезу є оцінка доцільності знайденого технічного рішення на третьому етапі. Якщо задача синтезу колони поставлена таким чином, щоб її вага не була більшою за певну Ве. личину, то в результаті оцінки ваги отриманої конструкції прид. мається певне рішення. Якщо поставлена умова виконується, То процес синтезу закінчується, а якщо ні, то продовжується до отримання бажаного результату. У випадку, коли дані, отримані на дру. гому етапі, не можна поліпшити, то необхідно поступитися деяким старим побажанням, наприклад, погодитися на збільшення ваги колони. Так або інакше, оцінку придатності знайденого варіанта системи необхідно зробити гнучкою, щоб вона добре адаптувалась до отриманих у процесі синтезу нових даних.
Розглянемо варіант, коли необхідно повертатися до першого етапу із заміною нового варіанта структури системи та її базису. Тут необхідно враховувати, що всі накопичені в процесі синтезу знання — виконання процедури аналізу (етап 2), оцінка отриманого рішення (етап 3), — все це впливає на формування ідеї про нову структуру або про новий базис елементів. Переглянувши декілька варіантів, наприклад, поперечних перерізів елементів колони (рис. 4.1), з'ясувавши, які з поставлених умов були виконані, а які ні, зрозумівши, якою він хоче бачити систему, конструктор пропонує такі нові описи системи, що після розрахунку їх параметрів можна прийти до висновку або про її прийнятність (кращого варіанта йому не знайти), або неможливість розв'язати задачу синтезу системи.
4.2.2. Про зміну постановки задачі синтезу
Як було показано раніше, синтез нерозривно пов'язаний із розумінням того, як веде або повинна вести себе система, які її властивості, характеристики, параметри і т. д. Приріст відповідної інформації не може не змінити постановки задачі синтезу. Якщо розглянути приклад 4.5 із паразитними коливаннями механічної системи, то можна говорити про дефект початкової постановки: вона не врахувала важливої вимоги, яка б забороняла системі проявляти коливальні властивості поза робочим діапазоном частот. Після того, як цей недолік системи був проаналізований конструктором' він, природно, ввів таку заборону, і постановка задачі змінилась.
Однак постановка задачі може змінюватися більш суттєво.
146
 Покажемо
це на прикладі (приклад
4.6)
циклічної
зміни будь-
якої
характеристики технічної системи, яка
становить функцію V
(і)
єдиного
аргументу і
(рис.
4.3). В ідеалі характеристика у(/)
повинна
. являти
собою
Покажемо
це на прикладі (приклад
4.6)
циклічної
зміни будь-
якої
характеристики технічної системи, яка
становить функцію V
(і)
єдиного
аргументу і
(рис.
4.3). В ідеалі характеристика у(/)
повинна
. являти
собою

^ ^ х прямокутник з
висотою Уд, по будований на ос нові ?о> і і (функ ція 1). Певно така характеристика взагалі не може бути реалізована або вона фізично допустима, але її *о Г2 гі реалізація вима-
_..,.,, . . гає значних вит-
Рис. 4.3. Можливі варіанти характеристики коштів Тому
системи, що синтезується: 1 - ідеальна; ' *
~ -, на початку синте-
2- з піковим виступом; 3 -зплавною конструктор
зміною параметра у '
ґ г системи вказує,
що він згоден на відхилення від функції 1, але вимагає, щоб це відхилення — певним чином виміряне — не перевищувало вказаного ним граничного значення. Виберемо за міру відхилення кривої 2 від функції, зображеної прямокутником 1, заштриховану площу і позначимо її (5 21- Тепер можна сформулювати вимоги до системи, яку
треба синтезувати. Варіант системи задовольняє встановлені вимоги тоді і тільки тоді, коли
821<д0, . (4.8)
де 5 о - граничне значення відхилення.
Необхідно побудувати алгоритм синтезу таким чином, щоб він Досягав зменшення заштрихованої площі до тих пір, поки нерівність (4.8) не стане виконаною. Як тільки це станеться, й інші вимоги до системи також будуть виконані, процедуру синтезу можна вважати завершеною. Тоді будь-яка система, що задовольняє вказані вимоги, відповідно до початкової постановки задачі вважається задовільною. В багатьох випадках знання величини #21 та виконання
Умови (4.8) для конструктора, який приймає рішення про закінчення Процесу синтезу, є недостатнім. Він бажає ще побачити характери-
147
стику V (/) у вигляді графіка 2 на рис. 4.3. Розглядаючи криву 2 робник системи може, наприклад, прийти до висновку про недот, тимість інтенсивності появи виступу, який має місце при і = і >, цьому випадку він може відхилити отриманий опис системи, хоча к нерівність (4.8) і була при цьому виконана.
Для отримання кращого рішення системи розробник починає процедуру синтезу спочатку, але при цьому вводить допоміжт, інформацію в початкову постановку задачі. Нехай при новому про-цесі синтезу отримано характеристику 3 (рис. 4.3), а величина 5,.
перевищила раніше визначену межу Зо, тобто нерівність (4.8) не виконується. Проаналізувавши ситуацію, розробник системи може прийти до висновку, що отримане рішення системи є прийнятним. Відсутність небезпечних виступів може виявитися настільки важливою перевагою нової характеристики, що розробник згоден і на порушення висунутої спочатку умови (4.8), і на сильне відхилення кривої 3 від прямокутника при 1 = 1\. Однак можлива й така стратегія пошуку, при якій розробник системи намагається зменшити ^і і
разом з ним ліквідує небезпечні виступи характеристики 2.
На основі розглянутого прикладу 4.6 приходимо до таких важливих висновків: 1) початково сформульована (до розв'язування задачі) постановка проблеми синтезу може не включати важливих вимог, які стають пізніше досить очевидними; 2) зміни постановки задачі майже неминучі в ході синтезу складних технічних систем; 3) у багатьох випадках оцінку переваг системи, знайденого проектного рішення неможливо або недоцільно формалізувати, тобто зводити до перевірки чисто кількісних вимог.
Найбільш показовим моментом виявляється тут невідтворюваність оцінки результатів. Інший розробник системи при подібному підході може віддати перевагу іншій характеристиці у(і). Більше того, той же розробник, який відхилив криву 2 (рис. 4.3) в іншій ситуації (володіючи іншою інформацією, перебуваючи в іншому оточенні або в іншому емоційному стані), міг оцінити характеристику 2 як задовільну.
148
 4.2.3.
Способи оцінки технічних систем
4.2.3.
Способи оцінки технічних систем
Розглянемо два основних способи оцінки технічних систем, які визначають і постановку задачі, і значною мірою структуру алгоритму синтезу.
Перший спосіб пов'язаний з розрахунком певного набору чисел та функцій. При цьому кожній із систем відповідає одна й та ж множина чисел і функцій, хто б і коли їх не розраховував та незалежно від умов розрахунків.
В останньому прикладі набір чисел і функцій складався з одного елемента 8 .
Після того, як числа і функції визначені, пе-
і
ревіряється виконання системи нерівностей або інших подібних
_ . . _ _ . .. . співвідношень.
Рис. 4.4. Задання області, до якої повинні на- Така перевірка
лежати характеристики всіх систем, з и т/ ^о.
що синтезуються значно приводать
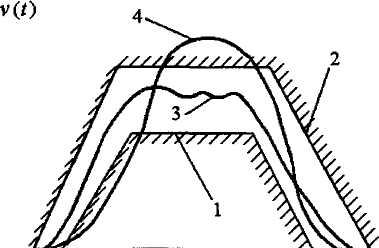
або до придатності системи, або до її непридатності. В розглянутому прикладі 4.6 достатньо було з'ясувати справедливість однієї нерівності (4.8). У більш складних випадках може виявитися необхідність перевірки, чи належить якась характеристика створюваної системи завчасно вказаній області. Наприклад, розробник може вимагати, щоб характеристика V (і) всіх придатних варіантів системи містилась у завчасно вказаній області (рис. 4.4). Тоді оцінка придатності системи зводиться до поточкової (для кожної абсциси І, розміщеної між ?о і 11) перевірки приналежності числа у(і) відповідному відрізку, який обмежений ламаними 1 і 2 (рис. 4.4). Виходячи з такого способу оцінки технічних систем, характеристика З задовольняє вказані вимоги, а характеристика 4 — ні.
Такий жорстко формалізований, однозначний, що не допускає ніяких неформальних моментів, підхід називають карди-налістським підходом до синтезу технічних систем [26].
149
Другий спосіб . Альтернативним до розглянутого способу Оц-нки технічних систем є ординалістська трактовка синтезу [26]. -рг" передбачається, що неможливо (недоцільно) використовувати дт/ оцінки технічних систем тільки набір чисел і функцій або на основ цього набору неможливо (недоцільно) завжди й однозначно дават' висновок про придатність системи.
До цих пір ми вважали, що мета синтезу полягає в знаходженні опису придатної (задовільної) системи. Такий підхід відповідає неоптимальному синтезу технічних систем.
Однак у багатьох випадках розробник хоче досягти максимальної мети — йому потрібна не задовільна, а найкраща з усіх можливих систем. Така стратегія проектування приводить до оптимального синтезу.
Неважко здогадатися, що оптимальний синтез неможливо виконати, якщо ми обмежимося винесенням рішення про задовільність, але не зуміємо зрівняти хоча б дві технічні системи, щоб вибрати з них кращу. Нехай запропоновано для порівняння дві технічні системи з певного набору і ми можемо зробити один з трьох висновків: перша система краща, ніж друга; друга система краща першої; з точки зору їх використання системи однакові (еквівалентні).
При кардиналістському порівнянні цих систем, оперуючи певним набором чисел і функцій, а також алгоритмом їх обробки, завжди та однозначно можна прийняти одне й тільки одне із трьох рішень. В ординалістському варіанті використання набору чисел і функцій, як і алгоритмів їх обробки, не забороняється. Однак тут не вказується ніякого формального правила, за допомогою якого можна зробити однозначний висновок про перевагу тієї чи іншої системи і який не залежав би від неформальних обставин, кваліфікації, досвіду та смаків експерта тощо.
Типовим прикладом кардиналістської оцінки може бути рішення віддати перевагу системі (приклад 4.6) з меншим 8 (рис. 4.3). Ординалістський шлях порівняння систем здійснюється експертом на основі вивчення графіків типу тих, які показано на рис. 4.3. Наприклад, експерт може віддати перевагу системі з характеристиками у(і), що не мають значних виступів, хоча їх відхилення від ідеальної характеристики були б значними.
150
 4.2.4.
Неоптимальний і оптимальний синтез
технічних систем
4.2.4.
Неоптимальний і оптимальний синтез
технічних систем
Розглянемо суть неоптимального та оптимального автоматизованого синтезу технічних систем з використанням ЕОМ. Нехай опис поведінки, характеристик і властивостей системи зводиться до задання п дійсних чисел К\,К.2,---,Кп— показників якості (функціонування) технічної системи. Кардиналістські рішення про задовільність і перевагу тих чи інших систем повністю можуть бути зведені до обробки цих п чисел, які утворюють деякий вектор К. В ординалістському трактуванні цей вектор також може виявитися корисним, хоча не повинен алгоритмічно приводити до однозначних рішень.
Неоптимальний кардиналістський синтез. Він полягає в перетворенні описів впливів, необхідної поведінки, характеристик і властивостей системи в такий опис бажаної системи, для якої одночасно виконується п нерівностей:
кп<кх<к\,
(4.9)
кпі<кп<к1
} (і =
Дійсні числа Кц та АГг- (і = 1, 2,..., я) задаються разом зі складом вектора К. Деякі з чисел Кц або всі вони можуть бути і нулями. Наприклад, для механічної системи (приклад 4.7) нерівності (4.9) можуть прийняти такий вигляд:
>' = 1,2,
<е\
п2)\
< V • (і = 1 2 п V
<,РІ (7 = 1,2, ...,пр\ < й) (нерівність з номером и-1),
(4.10)
151
< М (нерівність з номером гі). Тут О{- напруження для /-го елемента конструкції. Абсолютна величина напруження не повинна перевищувати (7,- (всього таких умов по); 2;, V і, м> ;- переміщення, швидкість і прискорення в де-якій у-й точці, абсолютні величини яких не повинні перевищувати граничних значень 2 :, V ,-, м> і (таких умов п2); Р% - зусилля в &-
му елементі конструкції, яке обмежується величинами Рк (число цих нерівностей Пр може дорівнювати па). Передостання з нерівностей (4.10) вимагає, щоб основна частота (й не була меншою від деякого граничного значення (О\, а остання нерівність обмежує масу М конструкції.
Необхідно відзначити, що в нерівностях типу (4.9) часто наявні вимоги до надійності (наприклад, до напрацювання на відмову) і техніко-економічні (наприклад, обмеження зверху на вартість системи).
Найчастіше машинний синтез використовується після того, як знайдена структура системи і вибрано базис її елементів. Тоді задовольнити нерівності (4.9) - (4.10) можна, лише змінюючи вектор а, від якого залежать усі К\, Л^,..., Кп.
Кардиналістський підхід до синтезу полягає в тому, що кожна
система однозначно характеризується набором чисел з вектора К. Рішення про задовільність системи вимагає перевірки, чи задовольняє кожний з компонентів цього вектора відповідну нерівність (4.9). Такий алгоритм синтезу не допускає ніяких неоднозначностей. Він допускає лише неоднозначність результату — може статися так, що задовільними є декілька систем. Розглянутий підхід синтезу не вказує алгоритму, за яким необхідно вибрати той чи інший варіант системи з отриманих задовільних варіантів.
Неоптимальний ординалістський синтез. Тут відсутній формальний алгоритм прийняття рішення про задовільність варіанта технічної системи. Можливий синтез системи, коли для '» оцінки відсутній набір функцій і чисел. Однак такий підхід недоцільний та не використовується в практиці створення технічних систем. Більш доцільним є спосіб, коли для оцінки систем зберігається набір чисел і функцій, але процес вибору складу векто-
152
 ра
К і крайніх меж Кц
та
Кі
у
нерівностях (4.9) здійснюється конструктором
неформально. Розглянемо це на прикладі.
ра
К і крайніх меж Кц
та
Кі
у
нерівностях (4.9) здійснюється конструктором
неформально. Розглянемо це на прикладі.
Приклад 4.9. При оцінці механічної системи, критерії задовільності якої виписані у вигляді (4.10), можуть у деяких випадках виключати окремі нерівності або доповнювати систему новими
нерівностями. Величини а і, 2.), V' р иЛ-, р\, (й\,М конструктор
може змінювати, виходячи з нової інформації, яку він отримав до певної стадії синтезу.
Вектор параметрів а , від якого залежать компоненти вектора К, повинен задовольняти певні обмеження. Неприклад, маси тіл та їх розміри повинні виражатися додатніми числами і не бути більшими за граничні значення. Цю умову можна сформулювати так: вектор а повинен належати деякій області в просторі параметрів Оа.
Оптимальний кардиналістський синтез. Вважаємо, що характеристики й властивості системи достатньо повно відображаються вектором К.
При оптимальному підході до синтезу системи частина компонентів, як і при неоптимальному синтезі, повинна задовольняти систему нерівностей (4.9). Інша частина складових повинна приймати мінімальні або максимальні значення, тобто
(4.Ц)
К 5=
Розглядаючи замість складових К, які повинні приймати максимальні значення, ті ж складові зі знаком мінус або зворотні величини, легко виключити із системи (4.11) умови максимуму. Наприклад, замінивши Кп+2 на — Кп+2, отримаємо
Кп+1= тіп, К= тіп,
(4.12)
К 3=
тіп.
3=
тіп.
І
153
Умови (4.12) називаються екстремальними, а нерівності (4.9) — 0§. меженнями в задачі оптимального синтезу технічної системи. При цьому вектор параметрів а повинен належати множині значень 5
Оскільки компоненти вектора К є функціями від а і характеризують цілі синтезу, то Кі(аі,...,ар) часто називають цільовими
функціями. Вирази системи (4.12) називаються критеріями опти-мальності. Задача оптимального синтезу в такій постановці вважається розв'язаною, якщо знайдено хоча б один вектор а такий що він сам належить С а, а показники якості, які йому відповідають, задовольняють вимоги (4.9) і (4.12).
Оптимальний ординалістський синтез. Співвідношення між цим підходом і тільки що розглянутим приблизно таке ж, як при неоптимальному синтезі. Як і там, перед розробником відкриваються два шляхи.
Можна розрахувати деякі числа, функції, побудувати якісь графіки та вважати, що вся ця інформація досить повно характери зує систему, яка створюється. Такі розрахунки і такі побудови по вторюються декілька разів у процесі зондування системи або її на правленого вивчення. Потім розробник вивчає ці набори чисел і графіків для різних варіантів побудови системи. В результаті такого вивчення він робить висновок, яка з систем найкраща, оптимальна. Інший або навіть той же розробник в інших умовах може прийняти інший варіант системи — в цьому виявляється неформальність ор- диналістського підходу до синтезу технічних систем.
Можна прийти до прийняття рішення при ординалістському синтезі і більш формально, використовуючи більш вільну трактовку кардиналістських умов (4.12) та факту належності вектора а до об ласті Са. У процесі синтезу допускається змінювати склад нерівностей (4.9) і набір критеріїв (4.12), переводити компоненти ве ктора К із (4.12) у (4.9) і навпаки або знехтувати якимись з них, де формувати область Са й змінювати межі Кц та К г- у нерівностях
(4.9).
У багатьох випадках такий ординалістський підхід виявляється більш корисним і порівняно з досить вільним ординалістським підходом, і порівняно з кардиналістським підходом.
4.2.5. Алгоритм неоптимального синтезу технічних систем
До цього розглядалися, в основному, проблеми постановки задачі синтезу та їх вирішення, виходячи із загальних принципів,
154
якими можна користуватися при знаходженні описів технічних систем. Тепер розглянемо деякі конкретні способи синтезу, які базуються на жорстко алгоритмізованих крадиналістських підходах.
Нехай цілі створення нової системи й висунуті до неї вимоги добре відомі розробнику, і він може визначити показники якості К\,К2>---,Кп, які повністю описують систему, і можна вказати
межі Кц,К\,..., Кп\,Кп, в яких відповідні показники повинні
знаходитись. Кардиналістська постановка задачі породжує абсолютно жорсткі вимоги до майбутньої системи. В обмін на це розробник отримує можливість перекласти весь процес синтезу технічної системи на ЕОМ, оскільки ніяких неформальних рішень, що пов'язані зі зміною постановки задачі, йому приймати не доведеться, хіба що в такій постановці розв'язати проблему синтезу взагалі не вдається.
Процес синтезу розпадається на ряд стадій. Перші з них пов'язані з синтезом структури і вибором базису елементів, тобто набору елементів, із яких будуються системи. Ці стадії погано піддаються формалізації, і, як правило, виконуються людиною при допомозі ЕОМ. Однак покажемо, як міг би бути алгоритмізований синтез структури, або, як його ще називають, структурний синтез.
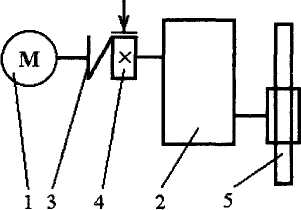
Нехай перетворення деякого входу и(ґ) у вихід у (і) у довільній за фізичною природою системі здійснюється всього лише трьома блоками А, В, С і кожен з них розміщується за іншим так, як показано на рис. 4.5 (приклад 4.8). Кожний із блоків А, В, С може займати будь-яку позицію 1, 2, 3.
"(О
1 |
|
2 |
|
3 |
|
|
У (0
Рис. 4.5. Структура системи, що синтезується: 1, 2, 3 — номери блоків системи
У цій дуже ідеалізованій ситуації на кожен із блоків можна дивитися як на неподільний елемент системи. В сукупності блоки А, В, С складають базис елементів синтезу. При цьому ми вважаємо, що мікроструктура кожного блока вибрана і фіксована, але їх параметри не визначені та є вільними. Позначимо відповідні сукупності параметрів блоків через пА, пв, пс.
155
До чого в таких умовах зводиться синтез системи? По-перще до вибору порядку розміщення блоків А, В, С: можливі структури АВС, ВСА, САВ, СВА, ВАС, АСВ. По-друге, до знаходження всіх
компонентів вектора п, тобто до знаходження "підвекторів" а
пв, пс. Результат останнього розрахунку повинен залежати від порядку розміщення блоків. Тому визначення параметрів, яке називається параметричним синтезом, не може бути ізольовано від синтезу структури.
До початкової інформації в кардиналістському неформальному синтезі належать: опис структур елементів (у нашому прикладі блоків А, В, С); опис області Са, до якої можуть належати допустимі значення набору параметрів п , тобто об'єднання наборів а ,
пв, пс; 2л чисел К \І5 К\,..., КП\,КП, які входять у нерівність (4.9)
і визначають уже сформульовані умови прийнятності системи, що синтезується.
Відомо, що синтез становить перетворення одних описів в інші. Описи, які нам треба знайти, такі: трьохелементна послідовність символів, що розміщує в певному порядку букви А, В, С — це опис структури системи; набір чисел п, тобто опис параметрів системи. Задача синтезу буде розв'язана, якщо описи, що знаходяться в початковій інформації, виявляться перетвореними в останні два.
Алгоритм синтезу можна розділити на наступні етапи.
1. На основі інформації про подібні системи й спираючись на досвід та інтуїцію конструктора або випадково, останній видає пев ну послідовність символів А, В, С і деякий початковий вектор пара-
метрів и . Цим повністю визначається система, якщо дотримуватися початкових припущень.
Проводиться частковий аналіз системи, що вибрана на по передньому етапі. Такий аналіз обмежується розрахунком вектора К.
Здійснюється перевірка п нерівностей (4.9) і формується вис новок про задовільність чи незадовільність системи.
Якщо система виявилась задовільною, то процес неоптимального синтезу можна вважати вдало завершеним. Якщо нерівності (4.9) не виконані, то здійснюється новий процес підбору задовільної системи. Цей процес здійснюється шляхом повернення до першого
156
 етапу
при наявності інформації про попередню
незадовільну систему-
етапу
при наявності інформації про попередню
незадовільну систему-
Можливі варіанти алгоритму синтезу відрізняються стратегією вибору в цих умовах нової системи. Тут можна йти двома напрямами. Перший — зберегти попередню структуру системи , тобто послідовність блоків, і постаратися задовольнити умови придатності системи за рахунок більш вдалого вибору вектора параметрів п, ніж у попередньому випадку, коли інформації було менше, ніж зараз. Це, по суті, намагання вийти з положення за рахунок параметричного синтезу. Другий — вважати, що незадовільність системи залежить від поганої структури, і тому подальші пошуки в просторі параметрів дають мало шансів на успіх. Тоді структура змінюється, тобто вибирається нова послідовність елементів А, В, С і в цій структурі вибирається нова комбінація параметрів — вектор п .
Якщо в нових умовах на першому етапі нова система так або інакше вибрана, то можна перейти до етапу 3 і проаналізувати на задовільність отриману систему. При цьому можливі два варіанти: або запропонований алгоритм синтезу приведе до задовільної системи, або обчислювальні ресурси будуть вичерпані до того, як це станеться (в подібних циклічних розрахунках часто встановлюється певний граничний час, і ЕОМ автоматично закінчує розрахунок, як тільки відведений час використано). В другому випадку розробнику необхідно замінити початкову інформацію, розширити обмеження на структуру або перейти до нового алгоритму синтезу.
Подібні розв'язки вимагають високої кваліфікації розробника. Перехід до нового алгоритму базується на впевненості, що задача синтезу в її початковій кардиналістській постановці може бути розв'язана, але використаний раніше алгоритм або не знаходить розв'язку, або розшукує його недопустимо повільно, Можливий також варіант, що не існує жодної структури й жодної комбінації параметрів, які дають змогу задовольнити п нерівностей (4.9). Тоді всі подальші намагання приведуть до невдачі і обчислювальні ресурси будуть використані марно.
4.2.6. Правила зміни структури і параметрів технічних систем
Правила зміни структури можуть базуватися на двох різних ідеях. Перша полягає в довільному переборі всіх можливих структур. Це, по суті, зондування структурного простору. Друга ідея враховує інформацію, що накопичилась на останньому або декількох
157
попередніх спробах синтезу. Нехай у першій серії спроб останнього прикладу 4.8 була структура АВС і намагання знайти для неї такі параметри, щоб система стала задовільною, виявились безуспішними. Алгоритм подальшого пошуку структури може будуватися з урахуванням невдачі в першій спробі. З неї, наприклад, може випливати, що А не повинно бути першим блоком. Тоді структуру АСВ можна не розглядати і таким чином зменшити кількість спроб синтезу структури системи.
Такі алгоритми можуть базуватися лише на глибокому розумінні того, як функціонує система, як структура першого блоку впливає на вектор показників К усієї системи і т. д. Зрозуміло також, що невдача пешої спроби може бути пов'язана з двома наступними блоками і подальший синтез системи в просторі структур буде направлено по хибному шляху.
Необхідно відзначити, що структурний синтез вимагає значних зусиль та витрат, бо його перспективність стає зрозумілою тільки тоді, коли закінчено і параметричний синтез. Оскільки структури містять, як правило, досить велику кількість елементів, то вимоги до обчислювальних засобів бувають досить значними.
Алгоритмічні пошуки структури системи пов'язані зі значними труднощами. їх можна порівняти, наприклад, з пошуком найкращого наступного ходу в шаховій партії. Для них характерні і вимушена відмова від довільного перебору всіх варіантів, і необхідність кількісно оцінити значну й важко формалізовану накопичену інформацію, і проблема прогнозу тих наслідків, до яких може привести прийняте рішення. Такі задачі зараз інтенсивно досліджуються, і, можливо, з часом перспективи алгоритмічних пошуків структури будуть більш реалістичними, ніж сьогодні.
Ситуація з правилами зміни параметрів при синтезі технічних систем значно спрощується. В цій задачі структура системи відома, залишається знайти такий вектор а, щоб були виконані п нерівностей (4.9). Оскільки в усіх відношеннях, крім вибору вектора,
система описана, то відомі і правила обчислення вектора К.
Отож, формально кажучи, необхідно розв'язати деяку систему нерівностей. Розв'язуванням цієї задачі займається спеціальна галузь математики. Покажемо, як поєднати розв'язування системи нерівностей із задачею знаходження екстремуму деякої спеціально підібраної функції. Таке зведення однієї проблеми до іншої поєднує
158
між собою неоптимальний і оптимальний параметричний синтез систем. Пояснюється це тим, що багато задач оптимального синтезу також зводяться до знаходження екстремуму.
Для простоти обмежимось випадком, коли показників якості системи всього два (п = 2). Тоді необхідно знайти вектор а такий, щоб виконувалося дві нерівності:
Кп<Кх(а)<к\, К21<К2(а)<К12. (4.13)
При цьому вектор параметрів зобов'язаний належати області Са, яка вже вказана.
Перетворимо дві двосторонні нерівності (4.13) в чотири односторонні:
Кх(а)-К\<0; Кіг-Кх{а)<Ь;
(4.14)
К2 (а) - К2< 0; К21- К2 (а) < 0.
Якщо позначити тепер ліві частини нерівностей (4.14) через /\(а),..., /4(0), то отримаємо еквівалентну (4.14) систему:
Л(а) < 0,
(4.15)
/4(а) < 0.
Із чотирьох функцій зліва в (4.15) побудуємо одну Р(а) за правилом
\<і<4 Цей запис означає, що для кожного значення а обчислюються
чотири значення /\(а), /2(а)> /з(^)> І^Ф) и ^РЗД них вибирається найбільше — воно і приймається рівним Р(а) ■ Якщо тепер знайти такий вектор а \, щоб було
/г(а1) = ГПІП (4.17)
і вектор а і належав Са, то знайдене значення а і буде задовольняти початкові нерівності (4.13), а з ними і (4.14) та (4.15).
159
це гіпотетичних
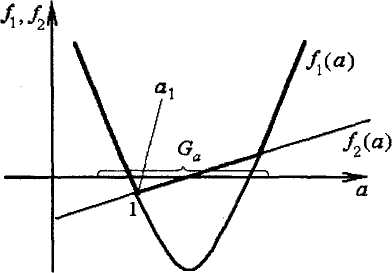
Рис. 4.6 ілюструє на прикладі двох функцій від однієї
Рис. 4.6. Зведення системи нерівностей до
розв'язання задачі пошуку мінімуму
(жирна ламана)
змінної (параметра) а (приклад 4.9). Легко бачити, що знайдене таким чином значення (точка 1) задовольняє всі нерівності (хоча це і не єдина точка зору). У всякому разі бачимо, що, вміючи розв'язувати задачі мінімізації, які пов'язані з оптимальним кардиналістським синтезом, можна реалізувати і процес неоптимального синтезу.
4.3. Морфологічний аналіз і синтез технічних систем
Метод морфологічного аналізу та синтезу, розроблений швейцарським астрономом Ф.Цвіккі, побудований на принципах комбінаторики [27]. Суть його полягає в тому, що в технічній системі або в іншому об'єкті виділяють групу основних конструктивних або інших ознак. Для кожної ознаки вибирають альтернативні варіанти, тобто можливі варіанти його реалізації. Комбінуючи їх між собою, можна отримати множину різних технічних рішень, у тому числі і тих рішень, які мають практичний інтерес.
Практичне використання методу полягає в побудові морфологічної таблиці, заповненні її можливими альтернативними варіантами та виборі із всієї множини найбільш прийнятних технічних рішень.
Найбільше поширення отримав метод Цвіккі, в якому за ознаки вибираються функції елементів технічної системи, а за альтернативні варіанти — різні способи реалізації кожної функції. В цьому випадку морфологічна таблиця буде мати стільки стовпців, скільки функціональних елементів в системі на вибраному рівні. Тоді кількість можливих варіантів технічних рішень визначається залежністю
160
де т - число функціональних елементів системи на заданому рівні; уц- число альтернативних варіантів г-го (і = 1, 2,..., пі) функціонального елемента.
Розглянемо побудову морфологічної таблиці на прикладі стрілової системи вантажопідйомного крана з горизонтальним переміщенням вантажу при зміні вильоту (рис. 4.7).
Стрілова система складається з таких основних
функціональних еле-
2 ^^^®| ментів: 1 - стріловий
Рис. 4.7. Схема стрілової системи крана
п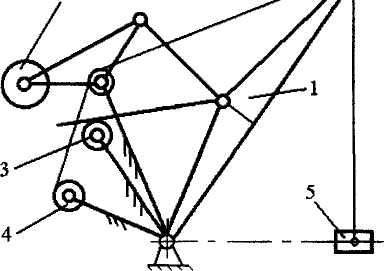 ристрій;
2 - механізм його
врівноваження; 3 -приводний
механізм; 4 -механізм вирівнювання
траєкторії
вантажу 5. Для
розглянутої системи морфологічна
таблиця має
чотири стовпці, в які входять
функціональні елементи стрілової
системи (табл. 4.1). У цій же таблиці
в кожному стовпці приведеш альтернативні
варіанти
функціональних елементів
стрілової системи.
ристрій;
2 - механізм його
врівноваження; 3 -приводний
механізм; 4 -механізм вирівнювання
траєкторії
вантажу 5. Для
розглянутої системи морфологічна
таблиця має
чотири стовпці, в які входять
функціональні елементи стрілової
системи (табл. 4.1). У цій же таблиці
в кожному стовпці приведеш альтернативні
варіанти
функціональних елементів
стрілової системи.
Шляхом вибору одного з альтернативних варіантів технічних рішень з кожного стовпця отримаємо один із можливих варіантів стрілової системи. Так, якщо взяти альтернативні варіанти під першим номером із кожного стовпця, то отримаємо варіант стрілової системи, який показано на рис. 4.7.
Усього ж з цієї таблиці можна отримати N = 6-5-6-5=900 варіантів стрілової системи вантажопідйомного крана з горизонтальним переміщенням вантажу. Ця таблиця може доповнюватися новими можливими варіантами функціональних елементів.
161
Таблиця 4.1 системи ван-
Морфологічна таблиця можливих варіантів стрілової тажопідйомного крана
|
Функціональні елементи |
|||
Аль-тер-натив-ні варіанти |
Стріловий пристрій |
Механізм врівноваження |
Приводний механізм |
Механізм вирівнювання траєкторії вантажу |
1 |
Жорстка прямолінійна стріла |
Чотири-ланковий |
Рейковий |
Профільний барабан |
2 |
Жорстка криволінійна стріла |
Шести-ланковий |
Гвинтовий |
Вирівнюва-льний блок |
3 |
Шарнірно-складова стріла з прямолінійним хоботом |
Поліспастовий |
Гідравлічний |
Вирівнюва-льний поліспаст |
4 |
Шарнірно-складова стріла з профільним хоботом |
На стрілі |
Кривошипний |
Вантажний канат, паралельний осі стріли |
5 |
Прямолінійна стріла з висувними секціями |
Урівнова-жувальний візок |
Поліспастовий |
Вантажний канат, паралельний осі відтяжки |
6 |
Прямолінійна стріла із вставними секціями |
— |
Криво-шипно-коромис-ловий |
— |
162
 Таблиця
4.2
Таблиця
4.2
Морфологічна таблиця можливих варіантів приводного механізму стрілової системи вантажопідйомного крана
Альтернативні варіанти |
Функціональні елементи |
||||
Двигун |
Передавальний механізм |
З'єднувальний пристрій |
Гальмівний механізм |
Виконавчий механізм |
|
1 |
Електродвигун постійного струму |
Циліндричний редуктор |
Втулочно-пальцева муфта |
Колодковий 3 електромагнітним штовхачем |
Зубчастий |
2 |
Електродвигун змінного струму з коротко-замкнутим ротором |
Планетарний редуктор |
Зубчаста муфта |
Колодковий 3 гідравлічним штовхачем |
Цівковий |
3 |
Електродвигун змінного струму з контактними кільцями |
Черв'ячний редуктор |
Лацюгова муфта |
Стрічковий з важель-ним простим керуванням |
Черв'ячний |
4 |
Гідродвигун |
Хвильовий редуктор |
Кулачково-дискова муфта |
Стрічковий диференціальний |
Гвинтовий |
5 |
Двигун внурішньо-го згоряння |
Конічний редуктор |
Гідромуфта |
Дисковий |
Поліспастовий |
6 |
— |
Комбінований редуктор |
Глухе фланцеве з'єднання |
Порошковий елетро-магнітний |
Рейковий |
7 |
— |
— |
Кулачковий |
Електро- індукцій-ний |
Криво-шипно-короми-словий |
У приводному механізмі виділено п'ять функціональних елементів, різні альтернативні варіанти яких утворюють морфологічну таблицю (табл. 4.2).
163
Аналіз табл. 4.2 показує, що можна отримати N = 5 • 6 • 7 • 7 • 7 = 10290 варіантів приводу зміни вильоту стрілової системи. Не всі ці варіанти приводу можуть мати практичне втілення. Однак значна кількість альтернативних варіантів дає змогу провести аналіз різних конструктивних рішень і вибирати з них у тих чи інших умовах найбільш ефективні та перспективні конструкції приводів.
164
5. КЕРУВАННЯ ТЕХНІЧНИМИ СИСТЕМАМИ 5.1. Поняття керування
Питання про керування в складних технічних ситемах різної фізичної природи мають в останні роки все більше і більше значення. Це пов'язано з тим, що для технічних систем, які мають справу з високими енергіями, значними швидкостями, швидкоплинними процесами, дорогими установками й експериментами, характерна вимога найбільш раціонального використання ресурсів, вибору найкращих можливостей програми дій. Усе це визначає ті проблеми, які становлять предмет теорії керування.
У технічних системах проходять процеси, характер яких залежить від множини супутніх їм умов та факторів. Змінюючи умови проходження процесів, можна впливати на їх характер, змінювати їх, пристосовувати їх до тих або інших цілей. Таке втручання в природний хід процесу, зміна його і являють собою суть керування. Таким чином, можна сказати, що керування становить таку організацію того або іншого процесу, яка забезпечує досягнення певних цілей [28].
Будь-який процес керування можна розділити на чотири етапи: поява мети, оцінка ситуації, прийняття рішення і реалізація прийнятого рішення. Етап появи мети з'являється до початку процесу керування, тому його можна не розглядати. В зв'язку з цим процес керування можна розглянути як виконання трьох основних етапів:
1)збір та обробка інформації з метою оцінки ситуації, що склалась;
прийняття рішення про найбільш цілеспрямовані дії;
виконання прийнятого рішення.
Інколи буває необхідним ще четвертий етап: контроль виконання рішення.
Різні види задач керування відрізняються один від одного способом і послідовністю виконання цих операцій.
Існує багато задач, у яких механізми збору та обробки інформації та виконання прийнятого рішення відпрацьовані досить чітко, що над ними можна зовсім не замислюватися при здійсненні процесу керування. В таких задачах всі розглянуті процеси керування зводяться, по суті, до розгляду тільки другого етапу. Подібні задачі називають одноетапними задачами прийняття рішення.
165
До промислової революції керівництво дрібним підприємством могла здійснювати одна людина, яка здійснювала закупки, планувала і направляла роботу, збувала продукцію, наймала й звільняла робітників. При малих розмірах підприємства керівник міг приймати організаційні рішення, не використовуючи ніяких наукових методів та базуючись лише на своїх знаннях, досвіді, інтуїції. Якщо деякі з прийнятих рішень були не кращими, то вони не приводили до значних втрат або могли бути швидко виправлені.
Укрупнення промислових підприємств зробило неможливим здійснення адміністративних функцій однією людиною. З'явились керівники виробничих відділів, відділів збуту, фінансових відділів, відділів кадрів і т. д. Механізація й автоматизація виробництва привела до подальшого розчленування адміністративних функцій. Так, виробничі відділи виявились поділеними на більш дрібні групи, які займаються питаннями експлуатації та ремонту, контролю якості, планування, постачання, зберігання готової продукції тощо.
Кожний окремий спеціалізований підрозділ великої організації виконує певну частину спільної роботи, керуючись загальними цілями підприємства. Однак у кожного спеціалізованого підрозділу виникають і свої власні цілі. Всі ці цілі не завжди узгоджуються, а інколи вступають у протиріччя між собою.
Як приклад можна розглянути проблему забезпечення підприємства запасами. Окремий підрозділ може бути зацікавлений у значному збільшенні запасів на складі для забезпечення неперервного випуску своєї продукції. Але при обмеженому об'ємі складських приміщень це приводить до зниження запасів для інших підрозділів. У результаті виникає задача організаційно-управлінського типу — вибір такої стратегії у відношенні запасів, яка була б найбільш доцільна для всього підприємства в цілому.
При розв'язуванні подібного роду організаційно-управлінських задач необхідно дуже добре розуміння цілей окремих підрозділів і таке їх погодження, щоб вони не вступали в протиріччя ні між собою, ні із загальними цілями всього підприємства. Якщо при цьому врахувати, що прийняття некращих рішень в умовах великого підприємства може принести немалі збитки, то стає ясно, що при розв'язуванні організаційно-управлінських задач стає недопустимим базуватись тільки на особистому досвіді й здоровому глузді. Необхідні наукові методи.
Розробкою наукових методів розв'язування організаційно-управлінських задач займається наукова дисципліна, яка отримала назву дослідження операцій. Під операцією розуміють деякий ор-
167
Однак такий підхід у більшості випадків є ідеалізованим і спрощенням реального керування. В дійсності всі етапи процесу керування знаходяться в тісному взаємозв'язку і етап прийняття рішення вимагає детального розгляду можливих способів реалізації прийнятого рішення.
Інколи процес керування розбивають на декілька послідовних кроків, причому рішення, прийняте на будь-якому кроці, залежить від результатів виконання рішень попереднього кроку. Прикладом може бути процес керування складною системою, якою є ракета (при запуску її із Землі на Місяць). Тут важливо виділити наступні кроки: виведення ракети на навколоземну орбіту, організація руху ракети в напрямку Місяця, перехід ракети на навколомісячну орбіту, посадка ракети на Місяць.
У цьому прикладі окремі кроки процесу керування виявилися досить природними. Однак у багатьох випадках розбивання складного процесу керування на кроки з чітким виділенням усіх його етапів на кожному кроці виявляється досить складною задачею.
Із розглянутого бачимо, наскільки складними і різноманітними можуть бути задачі керування. Однак значною мірою можна недооцінити складність розв'язування цих задач, якщо враховувати ті обставини, що процеси керування проходять, як правило, в складному навколишньому оточенні. На здійснення процесів керування впливають різноманітні зовнішні фактори, сукупність яких часто називають станом природи. Для того, щоб прийняти правильне рішення про ті або інші дії, необхідно оцінити результати цих дій, а для цього необхідно знати характер ситуації, в якій ці дії здійснюються.
Однак типовим для задач керування є випадок, коли наявна інформація буває або недостатня для точної оцінки ситуації, або викривлена зовнішніми факторами. При цьому недостатність інформації не знімає задачі прийняття рішення. Особливість задач керування саме в тому і полягає, що рішення повинно бути обов'язково прийняте незалежно від того, в змозі ми точно оцінити результати, до яких приведе прийняте рішення, чи ні.
Таким чином, у процесі керування виникає важлива задача прийняття рішення в умовах, коли інформація про ситуацію, то склалась, або недостатня, або викривлена. Така задача отримала назву задачі прийняття рішення в умовах невизначеності.
Розглянемо ще один специфічний клас задач керування, який пов'язаний із діяльністю великих промислових підприємств, на зра зок організаційно-виробничої технічної системи, яка була розгляну та в другому розділі.
166
теріали до об'єкта будівництва можна, користуючись залізничним, водним та автомобільним транспортом. Розв'язком задачі буде вибір найбільш вигідного виду транспорту з точки зору часу доставки, вартості, збереження властивостей матеріалів тощо. Аналогічний стан має місце і в задачах керування технічними ситемами.
У тих випадках, коли мета керування може бути досягнута декількома різними способами, на спосіб керування можна накласти додаткові вимоги, ступінь виконання яких може служити основою для вибору способу керування.
У багатьох випадках реалізація процесу керування вимагає витрат тих чи інших ресурсів, електроенергії і т. п. Отже, при виборі способу керування необхідно говорити не тільки про те, чи досягається поставлена мета, але й про те, які ресурси доведеться витратити для її досягнення. В цьому випадку задача керування полягає в тому, щоб із множини рішень, які забезпечують досягнення поставленої мети, вибрати одне, що вимагає найменших витрат ресурсів.
В інших випадках основою для вибору способу керування можуть бути інші вимоги, що накладаються на систему керування: вартість обслуговування, надійність, відхилення отриманого стану системи від бажаного тощо.
Математичний вираз, який дає кількісну оцінку ступеня використання накладених на спосіб керування вимог, називають критерієм якості керування. Найбільш доцільним, або оптимальним. способом керування буде такий, при якому критерій якості керування досягає мінімального (максимального) значення. При виборі, наприклад, режиму польоту ракети за критерій якості керування можна прийняти або вираз для кількості палива, яке витрачається на одиницю шляху, або шлях, котрий проходить ракета за рахунок одиниці палива. Найбільш економічному, тобто оптимальному режиму руху буде відповідати в першому випадку мінімальне, а в другому максимальне значення критерію якості керування.
Наведене визначення оптимального керування розглядатимемо як попереднє. Більш повне визначення буде наведено після розгляду обмежень, які накладаються на процес керування.
5.2.2. Обмеження, що накладаються на процес керування
Задачу знаходження оптимального керування або керування взагалі необхідно вважати неіснуючою, якщо на характер руху системи не накладено ніяких обмежень. При розв'язуванні задачі керу-
169
ганізаційний захід, проведення якого передбачає певну чітко сформульовану мету, наприклад, регламентацію збережуваних на складі запасів. Повинні бути задані умови, що характеризують обставини проведення заходу, зокрема потреби в запасах і обмеження на складські приміщення в розглянутому прикладі. Метою дослідження операцій є знаходження і наукове обгрунтування таких способів, проведення заходів, які в певному сенсі є найбільш вигідними.
Специфічна особливість задач організаційно-управлінського типу полягає в тому, що наслідки того або іншого способу їх вирішення можуть суттєво відобразитися на роботі всього підприємства. Тому прийняття кінцевого рішення завжди належить до компетенції відповідальної особи, адміністратора, який наділений відповідними правами і виходить за рамки дослідження операцій. Дослідження операцій має на меті дати в руки адміністратору обгрунтовані рекомендації до прийняття рішення.
Таким чином, дослідження операцій являє собою науковий напрям, мета якого полягає в розробленні методів аналізу цілеспрямованих заходів (операцій) і об'єктивна порівняльна оцінка можливих рішень. Хоча дослідження операцій становить самостійний науковий напрям, при розв'язуванні окремих задач воно застосовує методи кібернетики.
5.2. Оптимізація процесу керування 5.2.1. Критерій якості керування
Задачу керування будемо розглядати як математичну. Однак, на відміну від багатьох інших математичних задач, вона має ту особливість, що допускає не одне, а множину різних рішень. Це пов'язано з тим, що в задачах керування існує, як правило, багато способів організації будь-якого процесу, які приводять до досягнення поставленої мети. Так, при запуску ракети на Місяць можна вибрати різні траєкторії для її польоту і т. п. Тому задачу керування можна було б ставити як задачу знаходження хоча б одного з можливих способів досягнення поставленої мети. Однак така постановка питання буває недостатньою.
Якщо є множина рішень будь-якої задачі, то необхідно вести розмову про вибір такого рішення, яке з тієї чи іншої точки зору було б найкращим. Можна навести багато прикладів подібних задач. Так, існує багато способів для виготовлення ємкості з листа металу заданих розмірів. Розв'язком цієї задачі необхідно вважати отримання ємкості максимальної місткості. Доставляти будівельні ма-
168
вання неможливо не враховувати ті обставини, що рух будь-якої системи завжди підлягає різного роду обмеженням.
Для більш повного уявлення про обмеження розглянемо конкретний приклад керування автомобілем. Здійснюючи процес керування, водій повинен рахуватися з тим, що автомобіль має обмежену потужність двигуна, а це значить, що він може везти лише обмежений вантаж з обмеженою граничною швидкістю. Завдяки інерційності, швидкість автомобіля і напрямок руху можуть змінюватись лише з обмеженим прискоренням. Це значить, що неможливо миттєво зупинити або миттєво змінити напрямок руху у випадку виникнення непередбаченої ситуації, і це, в свою чергу, обмежує швидкість руху. При виборі маршруту водій вимушений рахуватися з обмеженим запасом палива в баку і необхідністю поповнення цього запасу в дорозі й ін.
У загальному випадку існує два види обмежень на вибір способу керування [28]. Обмеженнями першого виду є самі закони природи, відповідно до яких здійснюється рух керованої системи. При математичному формулюванні задачі керування ці обмеження являють собою алгебраїчні, диференціальні або різницеві рівняння зв'язку. Другий вид обмежень становить собою обмеження ресурсів, що використовуються при керуванні, або інших величин, які в силу фізичних особливостей якоїсь системи не можуть чи не повинні перевищувати певних меж. Математично обмеження цього виду виражаються, як правило, у вигляді систем алгебраїчних рівнянь або нерівностей, які зв'язують змінні, що описують стан системи.
5.2.3. Постановка задачі оптимального керування
Задачу керування можна вважати сформульованою математично, якщо: сформульована мета керування, що визначена через критерій якості керування; визначені обмеження першого виду, які являють собою системи диференціальних або різницевих рівнянь, що обмежують можливі способи руху системи; визначені обмеження другого виду, які становлять собою систему алгебраїчних рівнянь або нерівностей, що враховують обмеженість ресурсів або інших величин, які використовуються при керуванні.
Спосіб керування, який задовольняє всі поставлені обмеження і зводить до мінімуму (максимуму) критерій якості керування, називають оптимальним керуванням.
170
5.3. Класифікація задач оптимального керування 5.3.1. Однокрокові задачі прийняття рішень
В однокрокових задачах не розглядаються методи реалізації прийнятого рішення, тобто визначається не величина і характер керуючого впливу п, а безпосередньо значення змінної стану системи X, яке забезпечує найкраще досягнення мети керування.
Однокрокова задача прийняття рішення вважається заданою, якщо задані простір сукупності неконтрольованих зовнішніх факторів V із розподіленням імовірностей р(У) для всіх УєК,
простір станів (розв'язків) X і критерій якості прийняття рішення, який для цього випадку називають цільовою Функцією. В літературі замість терміна "цільова функція" використовують також назву "функція виграшу" або "функція втрат". Цільову функцію, що визначає в явному вигляді цілі керування, можна розглядати як вихідну величину у технічної системи. Цільову функцію, яка залежить від неконтрольованих зовнішніх впливів V і від стану технічної системи х , можна записати у вигляді
у = У(х,У). (5.1)
Розв'язок однокрокової задачі полягає в знаходженні таких хєХ, які зводять до мінімуму функцію у, тобто задовольняють умову
дЬ _ _
х ={х єХ у(х,у)} = тіп. (5.2)
Якщо стоїть задача не мінімізації, а максимізації функції у, то
_ *
вона не приводить ні до яких труднощів, бо якщо при х є х
функція у(х,у) досягає максимуму, то при тому ж х функція — у (х, V ) буде досягати мінімуму.
Існує ряд методів розв'язування однокрокової задачі прийняття рішення. Застосування того чи іншого методу залежить від способу задання множини допустимих рішень х, від інформації про не-контрольований зовнішній вплив і від виду цільової функції у. Ознайомимося з характеристиками цих методів.
Задачу називають детермінованою, якщо немає невизначеності у відношенні до неконтрольованого зовнішнього впливу. В детермінованих задачах простір неконтрольованого зовнішнього впливу V складається тільки з одного елемента V , імовірність яко-
171
го дорівнює одиниці. В цьому випадку цільова функція буде залежати від стану технічної системи
у = у(х) = у(хь...,Х„). (5.3)
Однокрокову детерміновану задачу називають класичною задачею оптимізації [29], якщо в ній мають місце обмеження
/і(хь...,хп) = 0, і = \,...,т, т<п. (5.4)
У цій задачі необхідно знайти значення Х\,...,хп, які задовольняють рівняння (5.4) і мінімізують функцію у(х\,...,хп).
Однокрокові задачі отримали назву математичного програмування. Ці методи дають можливість знайти значення змінних Х\,...,хп, які задовольняють обмеження
//*!,. .,х„Я = ЬіІ = 1,. ./и (5.5)
і перетворюють у мінімум цільову функцію у(Х[,...,хп). На змінні часто накладають допоміжні умови невід'ємності їх значень. Необхідно відзначити, що математичне програмування являє собою не аналітичну, а алгоритмічну форму розв'язування задач, тобто дає не формулу, яка визначає кінцевий результат, а вказує лише обчислювальну процедуру, що приводить до розв'язування задачі. Тому методи математичного програмування стають ефективними, головним чином, при використанні ЕОМ.
Найпростішим випадком задачі математичного програмування є задача лінійного програмування. Вона відповідає випадку, коли ліві частини обмежень (5.5) і цільова функція (5.3) становлять лінійні функції від Х\,...,хп. У задачі лінійного програмування необхідно знайти невід'ємні значення змінних Х\,...,хп, які мінімізують цільову функцію
п У(Х1,...ІХП)=^СІХ] (5.6)
7=1 і задовольняють систему обмежень
^аі}х]<Ьі, / = 1,...,т. (5-7)
7=1
Будь-яку задачу математичного програмування, яка відрізняється від сформульованої, називають задачею нелінійного. програмування. В задачах нелінійного програмування або цільова
172
 функція
(5.3), або ліві частини обмежень (5.5), або
те й інше являють собою
нелінійні функції від Х\,...,хп.
Однак
до задачі нелінійного програмування
відноситься і така, в якій цільова
функція та обмеження
мають вигляд (5.6) і (5.7), але пропонується,
наприклад, цілочисельність змінних. Ця
остання задача одержала назву задачі
цілочисельного
програмування.
функція
(5.3), або ліві частини обмежень (5.5), або
те й інше являють собою
нелінійні функції від Х\,...,хп.
Однак
до задачі нелінійного програмування
відноситься і така, в якій цільова
функція та обмеження
мають вигляд (5.6) і (5.7), але пропонується,
наприклад, цілочисельність змінних. Ця
остання задача одержала назву задачі
цілочисельного
програмування.
Однокрокову задачу прийняття рішень називають стохас-
тичною. якщо простір некерованих зовнішніх впливів V складається більше ніж з одного елемента, так що відомим є не дійсне значення некерованих впливів V , а розподіл імовірностей р (у) на
просторі V .
Стохастичні задачі, які вимагають знаходження значень змінних, що задовольняють обмеження (5.5) і мінімізують цільову функцію (5.3), називають задачами стохастичного програмування. Однак у багатьох випадках шляхом іншого визначення цільової функції задачі стохастичного програмування можуть бути зведені до задач лінійного програмування. Оскільки некерований зовнішній вплив V є випадковою величиною із розподілом імовірностей р (у)
на просторі V , то і значення у(х,\?) при заданому х =(хі,...,хп) також буде випадковою величиною з тим же розподілом імовірностей р (V) на просторі V . Тому в цьому випадку за цільову функцію доцільно прийняти математичне сподівання функції у(х, V) на просторі V .
Таким чином, для випадкових процесів цільова функція має вигляд
Оскільки У\(х) являє собою детерміновану функцію від X, то задача знаходження змінних Хі,...,хп, які задовольняють обмеження (5.5) і перетворюють у мінімум цільову функцію (5.8), може бути розв'язана методами лінійного або нелінійного програмування.
Важливим випадком однокрокової стохастичної задачі прийняття рішення є випадок, коли величини Х\,...,хп можуть приймати лише кінцеву множину значень. Методами розв'язування таких задач займається розділ математики, який отримав назву "Теорія сто-хастичних рішень".
Останнім часом значну увагу приділяють задачам, у яких рішення приймається не однією особою, а декількома (наприклад,
173
двома), причому інтереси цих осіб протилежні. Прикладом може бути задача переслідування, в якій відстань між тим, хто переслідує і тим, кого переслідують, залежить від рішень та дій обох цих осіб При цьому той, хто переслідує, зацікавлений у тому, щоб максимально скоротити цю відстань, а той, кого переслідують, у тому щоб зробити її по можливості найбільшою. Подібні задачі отримали назву конфліктних ситуацій, а методи їх розв'язування розглядаються в теорії ігор. Осіб, що приймають рішення, називають гравцями
Оскільки в конфліктній ситуації рішення кожним із гравців приймаються незалежно від рішень іншого гравця, при математичному описі конфліктної ситуації простір рішень необхідно розглядати як прямий добуток двох множин X х2, де X = {.Х|,...,л:л} - простір рішень першого гравця; X = {2і,...,2т} - простір рішень другого гравця.
Елементи простору рішень X У.2 становитимуть пари виду (х,г),х єХ,2 є 2, тобто будуть визначатися рішеннями, які приймає як перший, так і другий гравець. Для простоти вважаємо, що невизначеність у стані неконтрольованого зовнішнього впливу відсутня. Тоді цільова функція
У = у(х^2) _ (5.9)
залежить тільки від елементів простору X X 2 .
Протилежність інтересів гравців полягає в тому, що перший гравець, який робить вибір із множини X, намагається своїм вибором мінімізувати цільову функцію, в той час як другий гравець, котрий робить вибір з множини X , намагається її максимізувати. Таким чином, суть конфліктної ситуації полягає в тому, що кожний гравець повинен прийняти найкраще зі своєї точки зору рішення, пам'ятаючи, що його суперник зробить те ж саме.
5.3.2. Динамічні задачі оптимізації керування
Серед задач керування значне місце займають задачі, в яких технічна система знаходиться в стані неперервного руху й змін під дією різних зовнішніх і внутрішніх факторів. Задачі керування такими технічними системами належать до класу динамічних чяпяч керу.: вання.
Технічна система називається керованою, якщо серед діючих на неї різноманітних факторів існують такі, користуючись якими
174
можна змінити характер її руху. Як уже вказувалось раніше, такі цілеспрямовані дії називають керуваннями і позначають п(і).
Характер руху технічної системи визначається системою диференціальних рівнянь
Хі=8і(х,п,у), Хі(0) = Сі г = 1,...,п, (5.10)
де Сі, / = 1,...,и характеризує початковий стан технічної системи.
Інколи цю систему скорочено записують у векторній формі у вигляді одного диференціального рівняння
І = 8(х,п,У), х(0) = С. (5.11)
Керування п(і) входить у рівняння (5.11), оскільки це рівняння визначає не просто конкретний рух технічної системи, а лише її технічні можливості, які можуть бути реалізованими шляхом використання того або іншого керування з простору допустимих керувань II .
Оцінити, наскільки при тому або іншому способі керування досягаються поставлені цілі, можна, як і раніше, шляхом уведення цільової функції (5.3), яку в даному випадку зручно записати у вигляді
У = Уу[х(і)Мі)і (5-12)
Так, якщо и(і) — миттєва витрата палива, а х(і) — миттєва швидкість автомобіля, то з точки зору витрат палива якість керування в будь-який момент часу може бути охарактеризована величиною
у(ґ) = и(і)/х(і), (5.13)
де у{і) - миттєва витрата палива на одиницю шляху.
При цьому необхідно відзначити, що функція у{і) буде залежати від некерованих зовнішніх впливів V, тобто сукупності зовнішніх факторів, які визначають умови руху автомобіля.
Цільову функцію (5.13) використовують досить рідко, оскільки вона дає оцінку лише миттєвих значень процесу керування, тоді як у більшості випадків виникає необхідність оцінити процеси в технічних системах протягом усього часу керування від 0 до 1\.
У багатьох випадках цільову функцію вдається підібрати таким чином, що оцінку процесу в технічній системі можна здійснити шляхом інтегрування цільової функції за весь час керування, тобто за критерій якості керування прийняти функціонал
175
Цп) = \оУу[х(і),п(ф- (5.14)
Так, якщо цільова функція має фізичну суть витрат, то вираз (5.14) визначає сумарні витрати за весь процес керування.
Інколи мета керування є бажаним ходом процесу 2(і). При цьому за цільову функцію можна взяти квадрат або абсолютне значення відхилення дійсного процесу х(і) від бажаного:
у(і) = [х(і)-г(і)]2; у(і) = \х(і)-ї(і)\. (5.15)
У цих випадках критерій якості керування (5.15) буде визначати повну квадратичну або абсолютну похибку.
У динамічних задачах керування поряд із обмеженнями І/ ={«!,...,м#}, які визначають простір допустимих керувань п, доводиться мати справу з інтегральними обмеженнями вигляду
ід' ^V[X(І), п(І)]СІІ < 1т= СОП8І. (5.16)
Досить часто доводиться мати справу з обмеженнями меж зміни миттєвого значення деякого параметра а (х~, п) в процесі керування. Позначимо через а§ таке значення параметра а, перевищення якого є небажаним. Якщо підінтегральну функцію ()у(х~,п),
яка має назву в даному випадку Функції штрафу, визначити із співвідношення
^О^Нг,.^ „12 (517)
[0, а<а0;
[[а(х,п)-а0]2 ,а>а0, то інтегральне обмеження (5.16) буде визначати вимогу, щоб миттєве значення параметра а могло перевищувати а о лише короткочасно і на незначну величину. Ця умова буде виконуватися тим жорсткіше, чим менше Іт. Так, при 1^=0 обмеження (5.16) узагалі не буде допускати перевищення а над а$.
Обмеження виду (5.16) виникають також тоді, коли необхідно мати справу з обмеженими ресурсами (енергії, палива і т. п.).
На основі наведених співвідношень можна дати таке визначення оптимального керування в динамічних системах.
Оптимальним називається керування п (і), яке вибирається з простору допустимих керувань II, таке, яке для системи, що опи-
176
сується диференціальним рівнянням (5.11), мінімізує критерій якості (5.14) при заданих обмеженнях на ресурси (5.16), котрі використовуються в процесі керування.
Динамічні задачі керування, як і однокрокові, можуть бути детермінованими, якщо простір стану некерованих впливів V складається тільки з одного елемента Уд, і стохастичними. якщо простір станів некерованих впливів V складається більш ніж з одного елемента і заданий апріорний розподіл імовірностей р (V ) на просторі V .
Серед стохастичних задач важливе місце займають задачі адаптивного керування, які використовують у тих випадках, коли апріорних даних про стан некерованих впливів недостатньо для здійснення ефективного керування або коли відсутній достатньо точний опис самої технічної системи. Адаптивне керування має за мету уточнення даних про стан навколишнього середовища або властивості технічної системи безпосередньо в процесі керування шляхом випробовування різних способів керування і пошуку того з них, який у тих чи інших конкретних умовах виявляється найбільш ефективним.
5.3.3. Керування кінцевим станом
У ряді випадків характер руху технічної системи в процесі керування не викликає суттєвого інтересу, а важливим є тільки стан, який прийме технічна система в момент закінчення процесу керування. Прикладами подібних задач може бути доставка вантажу до заданого строку в заданий пункт призначення, досягнення технічною системою до визначеного терміну заданої продуктивності і т. п. Такі задачі називають задачами керування кінцевим станом.
Позначимо через х(і{) стан технічної системи в кінцевий момент часу 11. Тоді цільова функція має вигляд
У = уЛ*(іі)і (5-18)
Оскільки х(і{) залежить від характеру застосованого керування и(і), то і значення у також буде залежати від застосованого керування. Тому задачу вибору оптимального керування можна сформулювати для цього випадку наступним чином: із простору допустимих керувань II вибрати таке керування м (і), яке для технічної системи, що описується диференціальним рівняннями (5.11),
177
мінімізує цільову функцію (5.18) при обмеженнях (5.16) на ресурси що використовуються в процесі керування.
5.4. Оптимальне керування як варіаційна задача
5.4.1. Математичне формулювання задачі оптимального керування
Характерною тенденцією в побудові сучасних технічних систем є прагнення отримувати системи, які з певних позицій можна вважати найкращими. При керуванні технічними системами, що виконують технологічні процеси, ці прагнення виражаються в тому, щоб отримати максимальну кількість продукції високої якості при обмеженому використанні ресурсів (сировини, енергії тощо). При керуванні транспортними технічними системами прагнуть мінімізувати час транспортування, кількість витраченого палива і т. п. У системах стабілізації викликає інтерес досягнення максимальної точності при наявності різних обмежень, що накладаються на координати технічної системи.
В усіх цих прикладах задачі керування зводяться до знаходження найкращого з певних позицій процесу з множини можливих процесів, тобто вони належать до класу динамічних задач оптимального керування.
Як було показано раніше, математичне формулювання динамічних задач оптимального керування зводиться до наступного. Існує технічна система як об'єкт керування, стан котрої характеризується миттєвою змінною х =(х],...,хп). Характер процесів у технічній системі можна змінювати, використовуючи те або інше керування и з простору допустимих керувань І/. В загальному випадку керування и є V може бути також миттєвою ве-личиноюм =(иі,...,ик).
Характер руху технічної системи описується системою диференціальних рівнянь
х = /(х,и),х(0) = с. (5.19)
За критерій якості керування приймають інтегральний функціонал виду
іо(и) = )/о[х(і)м(Ф. (5-20)
о
178
який фізично являє собою витрати. Тут /] - час проходження процесу керування; /о[х(і),и(і)] = Уо(і) - миттєві витрати в момент і при стані системи х(і) і керуванні и(і).
Допоміжними можуть бути обмеження, що накладаються на кількість ресурсів або межі зміни деяких параметрів, які визначаються математичним співвідношенням
ц
\д[х(ї),и(і)}і( = Іт. (5.21)
о
Як було встановлено раніше, оптимальним називають таке керування и з множини допустимих керувань V, при якому для системи, що описується диференціальним рівнянням (5.19), при заданих обмеженнях на існуючі ресурси (5.21) критерій якості керування (5.20) приймає мінімальне (максимальне) значення.
Сформульована подібним чином задача оптимального керування відноситься до класу варіаційних задач, розв'язуванням яких займається розділ математики, який отримав назву варіаційного числення. Величина ](и), що визначається співвідношенням (5.20),
називається функціоналом. На відміну від функції, наприклад /(х), числові значення якої задаються на множині значень аргумента X, числові значення функціонала Іо(и) задаються на множині всяких керувань и{і).
Завжди задачі, що вимагають мінімізації функціонала (5.20), при наявності інтегрального обмеження (5.21) замінюються мінімізацією нового функціонала
\(и) = \іь(хм)(1і + Ц0(хц)аі, (5.22)
о о
який підпорядкований тільки диференціальному співвідношенню (5.19). Параметр Я у функціоналі (5.22), що отримав назву множника Лагранжа, в задачах оптимального керування відіграє роль "ціни" обмежених ресурсів. Його значення знаходиться із граничних • умов варіаційної задачі.
Застосування методів варіаційного числення до задач знаходження оптимального керування не одержало поширення в зв'язку з цілим рядом труднощів, які виникають при цьому. Тому не будемо спинятися на методах розв'язування варіаційної задачі, а зацікавлених цим питанням відсилаємо до [30]. Відзначимо лише деякі моменти, які важливі для подальшого викладання матеріалу.
179
Найважливішим поняттям варіаційного числення є поняття варіації функції, яке при дослідженні функціоналів відіграє таку ж роль, як диференціал при дослідженні функцій.
Нехай /(х) — функція, неперервна на інтервалі [а, Ь]. Розглянемо внутрішню точку х цього інтервалу і деяке фіксоване значення диференціала аргументу функції Ах = йх. Тоді різницю значень функції в точках х + Ах та х
Дх + АХ)- Дх) = йДх) = /'(X) АХ (5.23) називають диференціалом функції /(х) у точці X. Умова <і/(х) =0 є необхідною умовою мінімуму функції/(х) у точці х.
Для отримання аналогії з варіаційним численням зручно диференціал (ї/(х) визначити по-іншому. Розглянемо значення функції /(х + є Ах). При фіксованих х та Дх воно буде функцією від £. Диференціюючи цю функцію за Є і вважаючи £= 0, отримаємо
— Дх + є Ах) | £=0 = /\х)Ах = (іДх). (5.24)
Розглянемо аналогічні поняття варіаційного числення. Нехай и(і) і и\(() —дві функції керування системою. Різницю
Ьи(і) = щ(і)-и(і) (5.25)
називають варіацією функції и(і), а різницю
61(и) = 1(и + ди)-Хи) (5.26)
називають варіацією функціонала.
Варіацію функціонала можна визначити по-іншому. Для цього розглянемо при фіксованих и(() та 8и(і) функціонал
і(и + гЬи) = ц(і), (5.27)
який є функцією £. Припустимо, що функціонал (5.27) визначений для різних £. Це означає, що можливі різні керування и(і) + є8и(і) поблизу фіксованого керування и(і), тобто и(і) являє собою внутрішню точку простору допустимих керувань II. При цьому варіацію функціонала можна визначити за аналогією з диференціалом функції, який визначено співвідношенням (5.24). В результаті цього отримаємо
Щи) = ~Ци + гМ\^. (5.28)
оє
180
Якщо и(і) становить оптимальне керування, то функція <р(є) буде досягати мінімуму при е= 0. У цьому випадку
дФ)\£=о =^-Хи + єАи)їг=0 = 0, (5.29)
дг Е=" де
тобто Щи) = 0. Таким чином, оптимальним керуванням буде таке, при якому варіація функціонала дорівнює нулю.
У варіаційному численні умова 5і(и) використовується для отримання диференціального рівняння Ейлера [30], серед множини розв'язків якого і визначається керування и(і), що мінімізує функціонал (5.22).
5.4.2. Проблеми розв'язування варіаційної задачі
При знаходженні оптимального керування варіаційними методами доводиться мати справу з труднощами, які мають принциповий характер:
Варіаційні методи дають можливість знаходити тільки відносні максимуми функціонала Xй) > Т°ДЇ як інтерес викликає зна ходження абсолютного максимуму або мінімуму.
Рівняння Ейлера для багатьох технічних систем виявляються нелінійними, що часто не дає можливості отримати розв'язок варіаційної задачі в явному вигляді.
Часто оптимальне керування технічними системами має розриви. Метод множників Лагранжа не в змозі визначити кількість та місце розташування точок розриву, і тому в цих випадках він не дає можливості знайти оптимальне керування.
На значення керуючих впливів і фазових координат технічних систем досить часто вводяться обмеження у вигляді нерівностей, що не дає можливості знаходити оптимальне керування варіаційними методами.
Оскільки остання обставина мала вирішальне значення для розвитку нових ідей в області оптимального керування, то спинимося на ній більш детально.
Звичайними обмеженнями, що накладаються на сигнали керування, є обмеження виду
\цх(і)\<>Мі% (5.30)
які означають необхідність обмеження за величиною сигналів керування. Так, обмеженими можуть бути: напруга, яка підводиться до якоря електродвигуна, граничний кут повороту руля автомобіля,
181
гранична температура в камері згоряння двигуна внутрішнього згоряння і т. п. При цьому отримання оптимальних процесів вимагає, як правило, підтримання сигналів керування на граничних значеннях, що відповідає найбільш швидкому й ефективному проходженню процесів у технічній системі. Типовий для цих випадків характер зміни керування и(і) при оптимальному процесі наведено на рис. 5.1.
-М 
Однак граничні значення керування и(і) лежать на межах області допустимих керувань V і, природно, не є внутрішніми точками цієї області, для яких тільки справедливі варіаційні методи. Правда, обмежень виду (5.30) можна позбутися шляхом уведення нових змінних V/, які зв'язані зі змінними м, співвідношенням мг= М/ зіпУг-. При цьому значення |мг-|= —Мі будуть відповідати змінним У;=+7г/2, що є
внутрішніми точками області нових допустимих керувань. Однак така заміна змінних, як правило, приводить до значного ускладнення отриманих рівнянь.
Наведеш труднощі сприяли інтенсивному вивченню проблеми оптимальності керування технічними системами. Л.С.Понтрягін і його учні, В.Г.Болтянський, Р.В.Гамкрелідзе та Є.Ф.Міщенко створили теорію оптимального керування [31], в основі якої лежить сформульований Л.С.Понтрягіним принцип максимуму як необхідна умова екстремуму функціонала при різних обмеженнях і умовах. Цей принцип дав змогу побудувати теорію оптимального керування на строгій математичній основі й відкрив широкі можливості для її практичного застосування при керуванні технічними системами.
182
5.5. Принцип максимуму Понтрягіна 5.5.1. Формулювання принципу максимуму
Мета керування в задачі оптимального керування полягає в мінімізації деякого функціонала. Розглянемо задачу з функціоналом
Н
І = \Л{х(і)м(і),і)іі + Ф{х(і1)їх), (5.31)
о який являє собою суму інтегрального функціонала
<1
\/§[х(і),и{і),ї)сіі і термінального функціонала Ф(х(іі)^1). Ця за-
0
дача має назву задачі Больца. її окремими випадками є задача з інтегральним функціоналом (задача Лагранжа) і задача з термінальним функціоналом (задача Майєра). Задача з інтегральним функціоналом при /о = 1 називається задачею оптимальної швидкодії.
Відзначимо, що при фіксованих І\,х$ і допустимому керуванні и{і) стан технічної системи х(ї) та значення функціонала (5.31) визначаються однозначно. Задача оптимального керування полягає в мінімізації цього функціонала на множині наборів (І\,х$, и, х).
Набір (^,Хо, и, х), який мінімізує функціонал (5.31), називається розв'язком задачі оптимального керування, керування и — оптимальним керуванням, а х — оптимальним станом. Часто розв'язком задачі оптимального керування називають пару (и, х).
Розглянемо наступну задачу оптимального керування з функціоналом (5.31)
Чи) = \/ь{х(і)м(і)л}іі -♦ пап, о
х(0 = /(х(і),и(04х(0)є Хо,х(іі)є Хх, (5.32)
и(і)€ІІ,0<і<і1.
При цьому вважається, що момент і-у не фіксований, тобто розглядається задача з незакріпленим часом; множина V не залежить від часу, а фазові обмеження відсутні. Уведемо функцію
183
п
Н(х,и,(,щ,уг)=% Уі/і(х,и,і), (5.зз)
*=0
де Щ - константа, у/(ї) = (у/і(і),...,у/п(і)). Функція Я називається функцією Гамільтона. яка відіграє тут роль, аналогічну функції Ла-гранжа у варіаційному численні. Функцію Н називають також функцією Понтрягіна. Функції Лагранжа і Гамільтона (Понтрягіна) мають такий самий вигляд, що й відповідні функції у варіаційних задачах класичного типу, тільки в ці функції не входять обмеження на керування, які в цьому випадку мають вигляд включення и є І/. Відзначимо, що область керування при цьому може мати будь-яку довільну природу. Вона може бути замкненою множиною або складатися зі скінченного числа ізольованих точок. Саме в цьому полягає принципова різниця між теорією оптимального керування та теорією класичного варіаційного числення, де завжди вважалось, що область зміни функцій керування відкрита і вони є неперервними, а функції /(х,и,ї) і /д(х,и,ґ) неперервно диференційовані. Для розглянутої задачі справедлива теорема 1 [31]. Теорема 1
Нехай вектор-функція и {і) є оптимальним керуванням,
а вектор-функція х (і) — відповідним оптимальним станом у сформульованій задачі оптимального керування. Тоді існує неперервна вектор-функція у/ (і) = Ш\(і),...,у/п({)\ і число у/д — ^ таке, що:
І) вектор-функція виду у/* = (щ(і), У*(0ь 0<(<ііє нульовий;
2)вектор-функція у/ (і) є розв'язком системи диференціальних рівнянь:
V,- (0 = - ~^Н{х(і)м(і)то МО)
и=и (і)' х=х*(і)
= -¥о ^-ШіШФ)- ЇУ/О^/№Ом(ОЛ (5-з4)
ах{ у=1 дХ(
і = і,2,...,п;
184
век-
НІх* (і), у/* (і), и*(О) = тах#(х*(О, У*(0, Л
У ' иєї/ V ' (5.35)
0<і<іҐ,
4) при кожному ґє[О, ^] виконується рівність
н{х*(і),¥*((),и*(і))=О. (5.36)
У формулюванні цієї теореми головною є умова максимуму (5.35). Саме тому теорему й назвали принципом максимуму. Умова 1 теореми виключає випадок Н = 0 і робить рівність (5.35) змістовою. За допомогою функції Гамільтона праву частину рівнянь стану з (5.32) можна записати у вигляді
,
, ч
дН(х,
у/, и,і) . 1
/і{х,и,()
=
у'
\
і = і,...,п.
Тоді початкову систему рівнянь стану з (5.32) разом з лінійною системою (5.34), яку називають спряженою системою, часто записують у симетричному вигляді:
уі=-дН{х,у,и,ї)Ідхі, і = 1,..., л.
Якщо в конкретній задачі вдається показати, що у/0 Ф 0, то завжди можна прийняти щ = -1, оскільки рівності (5.34) - (5.36) не змінюються при множенні їх на довільне число. Можливий випадок також, коли і//0 = 0. Тоді функція Гамільтона не включає /0, а це означає, що необхідні умови теореми 1 не включають інформації про функціонал І(м). Замінюючи початковий функціонал іншим, отримаємо для нової задачі ті ж самі умови оптимальності у формі принципу максимуму, що і для початкової. Задачі оптимального керування подібного типу називають особливими (або виродженими).
Рівність (5.36) використовується в основному для визначення кінцевого моменту часу і у і включена в число необхідних умов оптимальності тому, що тут розглядається задача
185
з нефіксованим часом керування. Якщо функції и (І) і Ці (І) задовольняють рівності (5.34), (5.35), то Нїх (і), у/ (і), и (і), і) = соіщ,
і тому при розв'язуванні конкретної задачі рівність (5.36) достатньо перевірити тільки для одного довільного фіксованого моменту
.Теорема 1 про принцип максимуму не дає повної відповіді на питання, як знайти оптимальне керування, оскільки про вектор уг(і) нам відомо тільки те, що це певний розв'язок системи (5.37), але невідомо, який саме. Однак принцип максимуму дає інформацію про структуру оптимального керування, що полегшує розв'язок задачі.
Принцип максимуму дає тільки необхідні умови оптималь-ності. Тому якщо певне допустиме керування задовольняє цьому
принципу, то воно не обов'язково є оптимальним. Функцію и (і), яка задовольняє всі умови теореми 1, називають екстремаллю Понт-рягіна. Лише для деяких класів задач (наприклад, лінійних задач оптимальної швидкодії) принцип максимуму є як необхідною, так і достатньою умовою оптимальності.
У прикладних задачах принцип максимуму нерідко дає можливість однозначно визначити оптимальне керування. Так, якщо завчасно відомо, що оптимальне керування існує і, крім того, знайдено єдине допустиме керування, то це єдине керування є оптимальним.
Наведемо також формулювання принципу максимуму для задачі з фіксованим часом керування. Для цього звернемось до задачі оптимального керування, яка відрізняться від попередньої тільки тим, що тут час керування 1\ будемо вважати фіксованим, тобто заданим із самого початку.
Для цієї задачі справедлива наступна теорема. Теорема 2.
Нехай вектор-функція и (і) являє собою оптимальне керування, а х (і) — відповідний йому оптимальний стан системи в задачі оптимального керування з фіксованим часом керування її. Тоді існує неперервна вектор-функція
у/ (і) = Ші(і),...,у/п(і)\ і число У'О-О такі, що виконуються умовиі), ...,3) теореми 1.
186
Єдине, чим відрізняються умови оптимальності теореми 2 від умов оптимальності теореми 1, полягає у відсутності рівності (5.36). У розглянутій задачі час /] задано, тому стає зайвою умова для його визначення.
5.5.2. Про методи розв'язування задач оптимального керування
Спинимось на схемі застосування принципу максимуму. Розглянемо задачу оптимального керування з фіксованим часом керування. Знаходження екстремалі Понтрягіна починається з центральної умови принципу максимуму
Н(х,\[/,и)^>тах, иеіі, (5.38)
з якої при кожному фіксованому наборі х, у визначають керування и, що є функцією параметрів хі у/, тобто
и = и{х,у). (5.39)
У загальному випадку це зробити досить складно, однак для деяких класів задач керування функцією (5.39) вдається записати в явному вигляді.
Нехай, наприклад,
т /і(х,и) = /і(х)+'£/ік(х)ик, і = 0Д...,л,
V
= [иеКт], ак<ик<Ьк, А: = 1,2,...,
т,
де ак,Ьк - задані числа. В цьому випадку функція Гамільтона має вигляд
т
я=XV,-/;■(*)+х
ик
к=\
ЇУі/ікі*)
г=0
./=о
і досягає максимуму (завдяки лінійності по м) тільки в граничних точках множини V, а саме при
п
ьк, якщо 2>і//*(*) >о;
і=0
ик=\
ак, якщо ^у/і/ік(х)<0. і=0
187
Припустимо, що функція (5.39) знайдена. Підставимо ц в початкову і спряжену їй системи. В результаті цього будемо мати
х = /(х, и(х, ц/)\
(5 40) у = -дН(х,у/,и(х,\і/))/дх, 0<і<іь
де
дН/дх = (дН/дхх, дН/дх2,..., дН/дхп). Отримано систему 2л диференціальних рівнянь відносно невідомих функцій Хі,Х2,---,хп,Щ,у/2,---,у/п, загальний розв'язок якої містить 2л довільних постійних. Після знаходження загального розв'язку ці довільні постійні визначають із 2и крайових умов:
х(0) = Х(°\х({1) = Х(1). (5.41)
У результаті використання умов (5.41) одержують деякі функції х(і) і X}/ (і). Для визначення у/о достатньо, як відмічалось раніше, розглянути два випадки, у/$= 0 і у^д = -1, і встановити, який із них має місце в дійсності. При цьому необхідно враховувати, що вектор-функція (у^о,у/(і)) повинна бути ненульовою.
Нехай функції х(і) і у/(і) знайдені. Тоді, підставивши їх у (5.39), отримаємо
и = и(х(і),щ(і)), 0<і<іь
Припустимо, що функція й виявилась кусково-неперервною, причому й= -и(х(ґ),цУ(і))€ІІ при кожному *є[0,/і]. Тоді ця
функція є екстремаллю Понтрягіна, а це значить, що вона входить у число керувань, які можуть бути оптимальними. Якщо відомо, що розв'язок задачі оптимального керування існує, і доведено, що екстремаль Понтрягіна й єдина, то вона є оптимальним керуванням.
Таким чином, застосування принципу максимуму зводиться до задачі використання умов максимуму (5.38) і розв'язування системи диференціальних рівнянь (5.40) з крайовими умовами (5.41). Це крайова задача принципу максимуму. В тих випадках, коли ЇЇ аналітично розв'язати не вдається, то використовують різні чисельні методи [32].
188
5.5.3. Використання принципу максимуму для оптимального керування механічними системами
Використання принципу максимуму для оптимального керування механічними системами розглянемо на конкретних прикладах.
Приклад 5.1. Розглянемо горизонтальне переміщення кранового візка з жорстким підвісом вантажу (рис. 5.2).
Нехай у початковий момент часу ( = 0 візок, який ми ототожнюємо з матеріальною точкою, знаходиться в положенні х = 0 і має швидкість V = 0. Задача полягає в тому, щоб вибрати такий режим роботи приводного механізму, при якому візок перемістився б у положення х = Дл: і при цьому його швидкість була рівною нулеві.
Очевидно, значення сили Р(і) не може бути скільки завгодно великим. Воно обмежене технічними можливостями приводного механізму, тобто
-Рг<Р(і)<Рр, І Є [а/і], (5.43)
де Рр, Рг - максимально допустимі рушійне і гальмівне зусилля
ПрИВОДу, ЯКІ Є ВеЛИЧИНаМИ ПОСТІЙНИМИ (Рп= СОП8І, Рг= СОП8І); І\ -
тривалість руху візка.

Ч^-гігЧ^
|
|
і |
Т |
- л * |
|
При цих умовах можливі декілька різних режимів роботи приводного ме- І. ханізму, які забезпечать необхідне пе реміщення візка. Необхідно вибрати такий режим руху візка, який із певної точки зору є найбільш вигідним. Вибе ремо за критерій такої вигоди мінімум тривалості руху візка, яка забезпечує максимальну продуктивність краново го механізму. Інтегральний функціонал Рис. 5.2. Схема горизон- такого критерію має вигляд тального руху кранового 'і
візка з жорстким підвісом І = [ (І І —> тІП. (5.44)
вантажу 0
Тепер можна математично сформулювати задачу оптимального керування переміщенням кранового візка: знайти кусково-неперервну функцію Р(і), підпорядковану нерівностям (5.43), при
189
якій розв'язок х(і) рівняння (5.42) задовольняє при і= 0 задані початкові умови
х(0) = 0, х(0) = 0,
а при деякому і=і\ — умови в
х(і{) = Ах, х(і{) = 0,
причому такий, що функціонал (5.44) приймає мінімально можливе значення на множині таких функцій Е. При цьому вважаємо, що клас кусково-неперервних функцій є найбільш широким класом технічно реалізованих функцій Р(і) ■
Сформульована задача є простою задачею оптимального керування. Керуванням у цій задачі служить функція Р{і).
Уведемо такі позначення: х = хьх = х2, Р{і) = и(і), Гр=а, ГТ=Ь, Р0=с, тп = т.
Після цього задачу оптимального керування рухом візка запишемо в такому вигляді: знайти кусково-неперервну функцію и(і),
що задовольняє нерівності -Ь<и(і)<а, 0<і<іі, для якої
розв'язок х (х\((), *2(0)
системи
х2=(и(()-с)/т Н
задовольняє крайові умови |
хх (0) = 0, *! (іі) = Ах, х2 (0) = 0, х2 00 = 0, (5.46)
причому функціонал
Ци) = І<і{ = і1 (5.47)
0 досягає свого найменшого значення.
Складемо функцію Гамільтона (Понтрягіна) для цієї задачі
Я = у/0 + ЩХ2+ У2 («(0-с)/т- (5-48)
Використавши для цієї функції спряжену систему (5.34), отримаємо
щ=-Н'Хі=0, іі,2=-Н'Х2=-щ.
190
Загальний розв'язок цієї системи має вигляд
Щ(і) = сь У2(і) = -с1і + с2,
де С\, с2 - постійні інтегрування.
Функція Н (5.48) лінійна по відношенню до и, тому умова максимуму (5.35) для неї виконується тільки при
„•(0 = Ь ¥к')>0' [ь, у2(<)<о.
Таким чином, оптимальне керування и (і) може приймати
# лише два значення а і - Ь і має, виходячи з лінійності функції у/2 > не
більше від одного перемикання, тобто такої точки, в якій функція
*
и (і) змінює свій знак. Тоді оптимальне керування має вигляд
• \ а, 0<Кі2, и (0 = 1 , (5-49)
\-Ь, І2<і<іь
де ?2 ■ момент перемикання керування.
За допомогою системи рівнянь (5.45) при керуванні (5.49) знайдемо оптимальний за швидкодією режим руху кранового візка:
[ [(а-с)/т]/2/2 + с1/ + с3, 0<?</2,
{- [{Ь + с)/т]і2/2 + с2і + с4, І2< 1<1Ь (5 5())
х (,) = { КД-С)НГ + С1' °^і<{2, \-[(Ь + с)/т]і + с2, І2<г<,іь
де с і, с2, с з, с 4 - постійні інтегрування.
Із крайових умов руху візка знаходимо постійні інтегрування: с1=с3=0;
с2=[{Ь + с)/т]іҐ, (5.51)
с4=Ах-[(Ь + с)/т]іі/2.
191
З умов неперервності швидкості х та переміщення х кранового візка знайдемо моменти часу перемикання рушійної сили 1^ і мінімальної тривалості руху (\:
П=,2
(5.52)
(а + Ь)Ах (а + с)(Ь + с)' '1 а + Ь
*
Рис. 5.3. Графіки зміни переміщення
х,
швидкості
х
і
прискорення
х
візка
при оптимальному
за швидкодією
режимі руху при обмеженнях
на діючі сили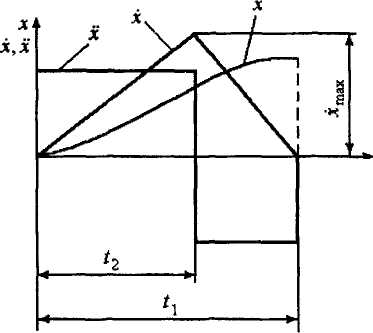
Однак при цьому режимі руху зростає максимальна швидкість візка *тах, що приводить до значного збільшення енергетичних витрат.
Приклад 5.2. Розглянемо ускладнену задачу з прикладу 5.1, у якій, крім обмежень на рушійну і гальмівну силу, вводяться обмеження на енергетичні витрати у вигляді інтегрального функціонала
1 П ?
Іт= — \-т„х <іі<А, (5.53)
'і О2
де А - допустима величина енергетичних витрат у процесі руху кранового візка. У виразі (5.53) враховані тільки енергетичні витрати, які йдуть на подолання інерційних сил опору. Енергетичні витрати,
192
що йдуть на подолання статичної складової сили опору переміщенню візка, не враховані в нерівності (5.53), оскільки вони не залежать від режиму руху.
Тут використовуються такі ж позначення, як і в попередній задачі. Тому задачу оптимального керування рухом кранового візка в розширеній постановці можна сформулювати наступним чином: знайти кусково-неперервну функцію и(і), що задовольняє нерівності
-Ь< и{і)<а, 0 </</], для якої розв'язок х{хі(і),Х2(0) системи (5.45) задовольняє крайові умови (5.46), причому функціонал (5.47) досягає мінімуму при обмеженні на функціонал
1 Ч
— \тх\йі<А. (5.54)
2іі0
Для цієї задачі запишемо функцію Гамільтона
Н = -щтхуіі+щх2+щ(и(і)-с)/т. (5.55) Із функції (5.55) отримаємо спряжену систему рівнянь:
^о=О; Щ=-Н'хх=0; У2=-Н'х2=-Щ—Х2-Щ.
Загальний розв'язок цієї системи має вигляд
т
Щ=сц\ ¥\ = с\; \і/1 = -щ—хг-с1і + с2,
ч
де с о, с і, с 2 - постійні інтегрування.
Функція (5.55) лінійна по відношенню до и, тому її максимум досягається при крайніх значеннях и. Якщо на деякій ділянці руху візка у^(0 = СОП8І, то 1/^2 = 0. З останньої рівності випливає, що
*2(0 = - —• (556>
сот
У рівності (5.56) величини Сд, Сі, т, 1\ є сталими, а це значить, що на цій ділянці х2(() = сопзі, а и (і) — с.
193
Таким чином, для забезпечення оптимального за швидкодією режиму руху кранового візка з обмеженнями на енергетичні витрати, рушійну і гальмівну силу приводу функція керування повинна мати такий вигляд
0<і<і2,
а,
"(0 =
с, Ї2<і<і3, -Ь, і3<і<Ц,
де ?2» ^3 ~ моменти часу для перемикання рушійної сили. Тоді оптимальний режим руху візка визначається залежностями:
[(а-с)/т]{ + си 0<і<і2;
*2(0 =
^5:
і2<кіу,
-[(Ь + с)/т]і + с2, І3<і<гх\
[(а-с)/т]і2/2 + Сіі + с3, 0<і<і2;
Хі(і) =
с5і + с6,
і2<і<і3;
-[(Ь + с)/т]і2/2 + с2і + с4, і3<і<іь
де С}, С2,...,Сб - постійні інтегрування, частина яких С\, с2, с^с^ визначаються з крайових умов руху візка за допомогою системи (5.51), а інша частина с$, с^ і моменти часу і\, 12,1 з визначаються з умов неперервності швидкості х(і) та переміщення х(() візка й обмеження на енергетичні витрати його переміщення, виходячи з системи рівнянь:
С5=[(а-с)/т]і2; с6=-[(Ь + с)/т]іі; і2=(іх-іг){Ь + с)І{а-с);
Ах = [(« - с)(2і3-12)(2+ (Ь + с)(/г І3)3]/(2т); ^ = [(в-с)2(ЗГз-2/2)гІ+(* + С)(ї1-/з)3]/(біп/1>
194
Оптимальним за швидкодією при обмеженнях рушійної та гальмівної сили і енергетичних витрат приводу є режим руху кранового візка, який складається з ділянок рівноприскореного пуску, сталого руху і рівносповільненого гальмування (рис. 5.4).
і
X, |
|
|
X |
|
|
х,х |
/ / |
|
^г —'—' |
|
|
|
|
|
\ < |
|
|
|
ч |
|
|
і |
|
|
|
|
|
||
|
|
'і |
|||
Рис. 5.4. Графіки зміни переміщення х, швидкості х і прискорення х кранового візка при оптимальному за швидкодією режимі руху й обмеженнях на діючі сили та енергетичні витрати
195
СПИСОК ЛІТЕРАТУРИ
Гермейер Ю.Б. Математическая теория исследования опера- ций.— М.: Наука, 1971.
Берталанфи фон Л. Общая теория систем: Критич. обзор // Исследования по общей теории систем.— М., 1969.— С. 5 - 29.
Богданов А.А. Теория организации или тектология.— М., 1913.
Калман Р., Фал б П., Арбиб М. Очерки по математической теории систем.— М.: Мир, 1971.
Философский знциклопедический словарь.— М.: Советская знциклопедия, 1983.
Михалевич В.С., Волкович В.Л. Вьгчислительньїе методьі ис следования и проектирования сложньїх систем.— М.: Наука, 1982.— 286 с.
Бусленко Н.П., Калашников В.В., Коваленко И.Н. Лекции по теории сложньїх систем.—М.: Сов. радио, 1973.
Бусленко Н.П. Моделирование сложньїх систем.— М.: Нау ка, 1978.
Беккер М.Г. Введение в теорию систем "местность- машина".— М.: Машиностроение, 1983.— 311с.
10. Глушков В.М., Иванов В.В., Яненко В.М. Моделирование развивающихся систем.— М.: Наука, 1983.— 337 с.
11. Сівко В.Й. Механічне устаткування підприємств будівельних виробів.— К.: ІСДО, 1994.— 359 с.
12. Яковлев А.С. Советские самолетьі.— М.: Наука, 1975.
Венников В.А. Теория подобия и моделирования.— М.: Вьісш. школа, 1976.— 479 с.
Брумберг В.А. Аналитические алгоритми небесной меха- ники.— М.: Наука, 1980.— 205 с.
15. Соболь И.М. Метод Монте-Карло.— М.: Наука, 1966.— 87 с.
Ловейкин В.С. Расчетьі оптимальних режимов движения механизмов строительнмх машин.— К.: УМК ВО, 1990.— 168 с.
Горский Б.Е., Ловейкин В.С. Методика составления опера- торов передачи движения // Горньїе, строительньїе и дорожньїе ма- шиньї.— К.: Техніка, 1979.— Внп. 28.— С. 99 - 105.
Самарский А.А. Введение в численньїе методьі: Учебн. посо- бие для вузов.— 2-е изд., перераб. и доп.— М.: Наука, 1987.— 288 с.
Растригин Л.А., Маджаров Н.Е. Введение в идентифика- цию обьектов управлення.— М.: Знергия, 1977.— 215 с.
Барабанчук В.И. и др. Планирование зксперимента в тех- нике.— К.: Техніка, 1984.— 200 с.
196
 21. Корн
Г. Исследование сложньїх систем
по частям
(диакоптика).—
М.: Наука, 1972.— 544 с.
21. Корн
Г. Исследование сложньїх систем
по частям
(диакоптика).—
М.: Наука, 1972.— 544 с.
Назаренко И.Й. Прикладньїе задачи теории вибрационньїх систем.— К.: ИСИО.— 216 с.
Чубук Ю.Ф., Назаренко И.И., Гарнец В.Н. Вибрационньїе машиньї для уплотнения бетонньїх смесей.— К.: Вища школа, 1985.— 168 с.
Розанов Ю.А. Случайньїе процесові.— М.: Наука, 1979.— 183 с.
Молчанов А.А. Моделирование и проектирование слож ньїх систем.— К.: Вища школа, 1988.— 317 с.
26. Ризкин И.Х. Машинний анализ и проектирование тех- нических систем.— М.: Наука, 1985.— 160 с.
Одрин В.М., Картавов С.С. Морфологический анализ сис тем.— К.: Наукова думка, 1977.— 148 с.
Основи автоматического управлення / Под ред. В.С. Пу- гачева.— М.: Физматгиз, 1963.
29. Хедли Д. Нелинейное и динамическое программирова- ние.— М.: Мир, 1967.
Краснов М.Л., Макаренко Г.И., Киселев А.И. Вариацион- ное исчисление.— М.: Наука, 1973.— 191 с.
Понтрягин Л.С., Болтянский В.Г., Гамкрелидзе Р.В., Мищен- ко Е.В. Математическая теория оптимальньк процессов.— М.: Наука, 1976.—392 с.
Васильєв Ф.П. Численньїе методьі решения зкстремальньїх задач.— М.: Наука, 1980.
197
ЗМІСТ
Вступ 3 •■