

1.3. Угол атаки нв. Режимы работы нв
Углом атаки НВ называется угол, заключенный между вектором воздушной скорости НВ и плоскостью вращения НВ (рис. 1.1). Угол атаки НВ изменяется в полете под влиянием управляющих воздействий пилота. В зависимости от направления воздушного потока НВ может работать в нескольких режимах обтекания: осевого, косого, плоского, вихревого кольца.
5

Рис.1.1 Угол атаки НВ
Режим осевого обтекания НВ отличается тем, что воздушный поток направлен параллельно оси вращения винта. Угол атаки НВ при этом составляет 90°. На этом режиме НВ работает при вертикальном подъеме, снижении, на висении.
Режим, косого обтекания НВ получается в том случае, если воздушный поток, возникающий при движении вертолета, направлен под некоторым углом атаки к плоскости вращения НВ. На таком режиме НВ работает при выполнении горизонтального полета, снижения или набора высоты по наклонной траектории.
Режим плоского (бокового) обтекания имеет место тогда, когда воздушный поток направлен параллельно плоскости вращения НВ. Угол атаки НВ при этом равен нулю.
Режим вихревого кольца НВ возникает при снижении вертолета с работающими двигателями на малой поступательной скорости. В этом случае воздушный поток проходит через ометаемую площадь НВ сверху вниз, и вновь тот же объем воздуха возвращается во всасывающую часть НВ.
Работа НВ в условиях самовращения качественно отличается от других режимов, так как НВ получает энергию для вращения от набегающего потока. Воздушный поток подходит снизу к плоскости вращения, и угол атаки НВ является положительным. На практике режим самовращения НВ применяется при отказе двигателей, поломке трансмиссии НВ и в других случаях.
Вывод: Параметры, определяющие характеристики НВ, тщательно подбираются в процессе проектирования и испытания НВ, так как от них зависят основные летно-технические данные вертолета.
1.4. Работа нв с позиции импульсной теории
Согласно теории идеального винта, не учитываются потери на трение и закручивание струи за винтом. Мощность, затраченная на образование тяги, расходуется только на увеличение кинетической энергии потока воздуха. Несущий винт рассматривается как диск, имеющий бесконечно большое количество лопастей, установленых под некоторым углом установки .
6
На режиме осевого обтекания воздух подсасывается лопастями, а отбрасывается в осевом направлении (рис. 1.2). В результате взаимодействия с НВ воздушный поток получает дополнительную индуктивную скорость.
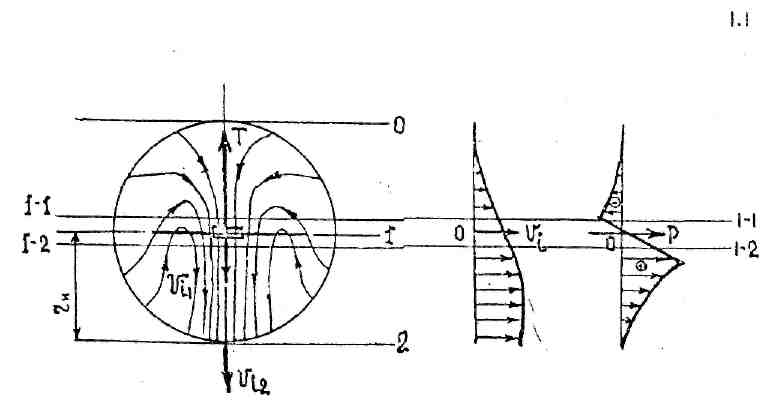
Рис. 1.2. Образование тяги НВ на режиме осевого обтекания
Исследования показали, что воздух по мере .приближения к плоскости вращения НВ увеличивает свою скорость от Vу до = Vу+ Vi1, где Vi1- индуктивная скорость подсасывания, которую имеет воздушный поток в плоскости вращения; Vу- вертикальная скорость подъёма или снижения вертолёта.
Под винтом скорость возрастает от Vi1 до V2= Vу+ Vi2. Дополнительная скорость Vi2 возникает вследствие отбрасывания воздуха винтом, к которому подводится механическая энергия. Vi2- это скорость отбрасывания. Доказано, что скорости Vi1 и Vi2 находятся в соотношении: Vi2=2 Vi1, то есть скорость под винтом удваивается.
Давление под винтом также возрастает от р1 до р2, а, начиная с некоторого расстояния (примерно радиуса НВ), − уменьшается до атмосферного(см. рисунок).
Следует заметить, что под винтом возрастает и скорость, и давление. Но это не противоречит закону Бернулли, так как энергия потока непрерывно пополняется.
Согласно второго закона механики, увеличение количества движения массы воздуха равно импульсу силы, приложенной к этой массе воздуха.
В то же время, согласно третьего закона механики, воздух воздействует на винт с силой, равной по значению и противоположной по направлению. Эта сила называется тягой несущего винта Тн, которая представляет собой силу реакции воздуха на изменение количества движения.
Вывод формулы тяги НВ: Ft = m Vi2-mVy, где Ft – импульс силы; m Vi2-mVy − изменение количества движения воздуха с массой m. После преобразования можно записать:
F=m(Vi2-Vy)/t= mс (Vi2-Vy); Vi2=2Vi1,
где mс - секундная масса воздуха, проходимого через ометаемую площадьНВ. Определяется по формуле: mc =Vi1Fн,
где ρ - массовая плотность воздуха; Fн - ометаемая площадь НВ.
На режиме висения Vy=0, поэтому после подстановки получается:
F=Vi1FнVi2=2Fн Vi12.
Так как Т=Fн, можно записать формулу тяги:
7
Тн=2Fн Vi12.
Из формулы следует, что на тягу НВ влияют: плотность воздуха, ометаемая площадь, индуктивная скорость подсасывания, зависящая от частоты вращения НВ и углов установки лопастей.
При увеличении шага НВ возрастает пропорционально массовый секундный расход воздуха, тяга увеличивается. По известной тяге можно определить соответствующую ей индуктивную скорость НВ:
Vi1=![]() .
.
Мощность, затраченная на работу идеального НВ, называется индуктивной:
N инд= Ni = ТVi.
Реальный НВ, в отличие от идеального, требует для своей работы дополнительных затрат мощности, вызванных потерями при его работе в воздушном потоке. Причинами потерь реального НВ являются:
Неравномерное распределение индуктивных скоростей по ометаемой площади. При этом среднее значение индуктивной скорости Viср у реального НВ меньше, чем Vi идеального НВ, рассчитанное для концевых сечений лопастей;
Закрутка струи воздушного потока, вызванная вязкостью воздуха;
Концевые перетекания воздуха, вызванные разностью давлений под и над винтом;
Наличие втулки и органов управления, не создающих тяги;
Профильное сопротивление лопастей. Потери мощности на профильное сопротивление составляют примерно 3035% потребной мощности НВ.
Наличие потерь приводит к снижению тяги реального НВ по сравнению с идеальным. Это уменьшение учитывается условным коэффициентом потерь (для
Ми-8 χ =0,9):
Тн=2рFн χ Viср2.
Здесь Viср − усреднённое значение индуктивных скоростей по ометаемой площади реального НВ.
На работу реального НВ затрачивается дополнительная мощность, называемая профильной Nпр.Совершенство реального НВ оценивается с помощью относительного кпд:
=
![]() .
.
То есть чем меньше профильные потери, тем выше кпд несущего винта.
На режиме косого обтекания воздушный поток, подводится к НВ под произвольным углем атаки, отличным от 90°. В этом случае через плоскость НВ проходят два потока – индуктивный со скоростью Vi1 и встречный (от косой обдувки) со скоростью V(Рис.1.3).
8
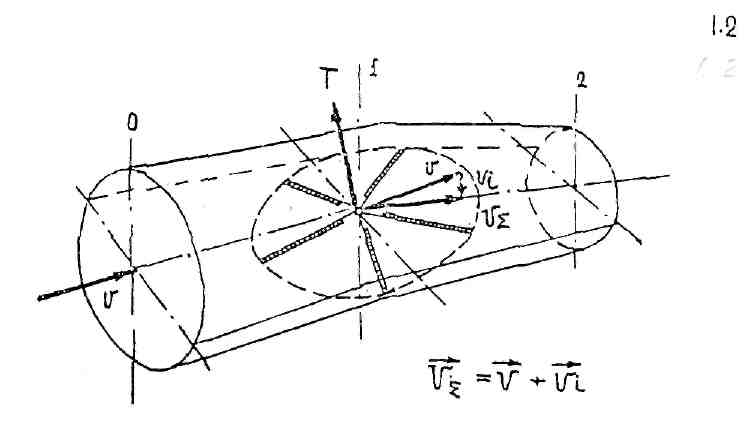
Рис.1.3 Образование тяги НВ на режиме косого обтекания
За счет увеличения секундной массы воздуха происходит увеличение тяги НВ по сравнению с режимом осевого обтекания.
Для расчета тяги НВ используется постулат Н.Е.Жуковского, согласно которому в образовании тяги НВ участвует масса воздуха, заключенная внутри цилиндра с диаметром, равным диаметру НВ. Поэтому вывод формулы тяги идеального НВ аналогичен расчёту для режима осевого обтекания:
Tн=mc (Vi2-0)=2mcVi1
mc =FнV; V=Vi1+V,
где V - суммарная скорость потока, проходящего через НВ. V V,
Поэтому mc FнV; Tн=2Fн Vi V; Vi=T/2FнV.
Для реального НВ: Тн= 2Fн χ Viср V.
При увеличении поступательной скорости тяга возрастает, так как увеличивается секундная масса воздуха. При сохранении тяги НВ постоянной уменьшается индуктивная скорость Vi, т.к. уменьшается шаг НВ. При уменьшении шага и сохранении частоты вращения НВ уменьшается подводимая мощность.
Следовательно, эффект косого обтекания приводит к существенному увеличению тяги НВ без подвода дополнительной мощности двигателей. При этом создается дополнительный запас мощности на вертолете.
Однако увеличение тяги происходит только до V= 120 км/ч. При дальнейшем увеличении скорости тяга снижается из-за роста потерь на НВ (срыва потока, волнового кризиса, расширения зоны обратного обтекания, профильного сопротивления на лопастях).
Вывод: Импульсная теория позволяет просто и наглядно объяснить сущность возникновения аэродинамической силы тяги НВ с помощью законов классической механики, устанавливает связь между тягой и массовым секундным расходом воздуха. Теория идеального НВ предполагает, что вся мощность, подводимая к НВ, расходуется только на создание индуктивной скорости. Тяга реального НВ снижается за счет потерь, возникающих в процессе взаимодействия НВ с воздушным потоком.
9