

1.9.4 Распределение тяг лопастей по ометаемой площади
При жестком креплении лопастей в косом потоке тяги по ометаемой площади распределяются неравномерно (см.рис. 1.21,график 2). Такой характер зависимости соответствует изменению эффективных скоростей обтекания по азимуту лопастей (рис. 1.6).
 При
наличии горизонтальных шарниров тяги
лопасти находятся на различных углах
взмаха в различных азимутах , как это
изображено на рисунке 1.20.
При
наличии горизонтальных шарниров тяги
лопасти находятся на различных углах
взмаха в различных азимутах , как это
изображено на рисунке 1.20.
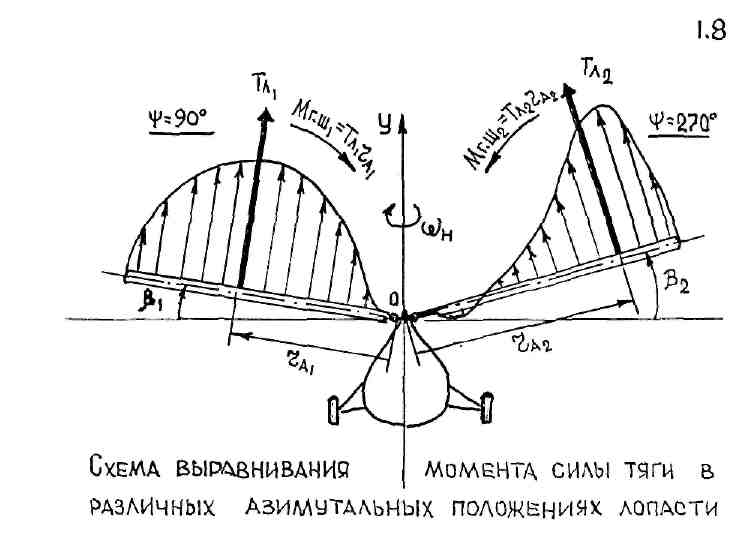
Рис.1.20 Распределение тяг лопастей па режиме косого обтекания
Лопасти совершают маховые движения, поэтому одновременно со скоростями обтекания изменяются углы атаки элементов лопастей (рис. 1.17), при этом скорости и углы атаки влияют на тяги лопасти прямо противоположно.
Из формулы расчета тяги лопасти Тл=0,5 СТ Л∙ (нr+Vosin)2F следует, что увеличение скорости обтекания нr+Vosin и одновременное уменьшение коэффициента тяги СТ приводит к выравниванию тяг лопастей по всей ометаемой площади. При этом тяги (подъёмные силы) Уал наступающих и отступающих лопастей приближаются по своему значению к осевому обтеканию(рис. 1.21 график 3).
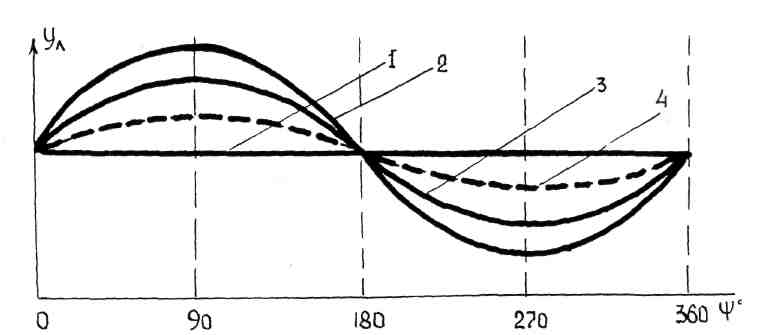
1-осевое обтекание
2-косое обтекание ,жесткий НВ
3- косое обтекание, НВ с горизонтальными шарнирами
4- косое обтекание ,НВ с регулятором взмаха
Рис.1.21 Распределение тяг лопастей по азимуту
При наличии поводковой компенсации (регулятора взмаха) кинематика регулятора позволяет получить дополнительное увеличение углов атаки при взмахах лопасти вниз (увеличение коэффициентов СТ ) и дополнительное уменьшение углов атаки при взмахах лопасти вверх (уменьшение коэффициентов СТ ). При этом уменьшается разница в тягах наступающих и отступающих лопастей – тяги распределяются наиболее равномерно по ометаемой площади (рис.1.21,график 4).
Вывод: Шарнирный НВ, снабженный ГШ, имеет следующие преимущества:
изгибающие моменты на втулку не передаются, так как под действием моментов сил лопасти поворачиваются относительно ГШ. Разгружается лопасть и втулка, конструкция облегчается, снижается масса конструкции НВ и вертолета, повышается ресурс несущей системы;
устраняется опрокидывающий момент НВ так как выравниваются моменты от тяг в различных азимутальных положениях лопастей (рис. 1.20). Благодаря этому увеличивается максимальная скорость вертолета и повышаются запасы поперечного управления.
распределение тяг по ометаемой площади становится более равномерным, снижаются вибрации вертолета, упрощается процесс балансировки вертолета.
1.9.5 Конус вращения несущего винта
При своём вращении лопасти шарнирного НВ образуют геометрическую фигуру - конус вращения.
При осевом обтекании все лопасти находятся в состоянии равновесия, на одинаковых углах взмаха βл.Поэтому ось конуса вращения совпадает с конструктивной осью вращения НВ. Равнодействующая лопастей Rл проходят вдоль оси лопасти и пересекает ось ГШ.
Равнодействующая
несущего винтаRН
представляет
собой геометрическую сумму равнодействующих
лопастей :![]() RН
=RЛ
и проходит вдоль оси НВ (рис. 1.22).
RН
=RЛ
и проходит вдоль оси НВ (рис. 1.22).
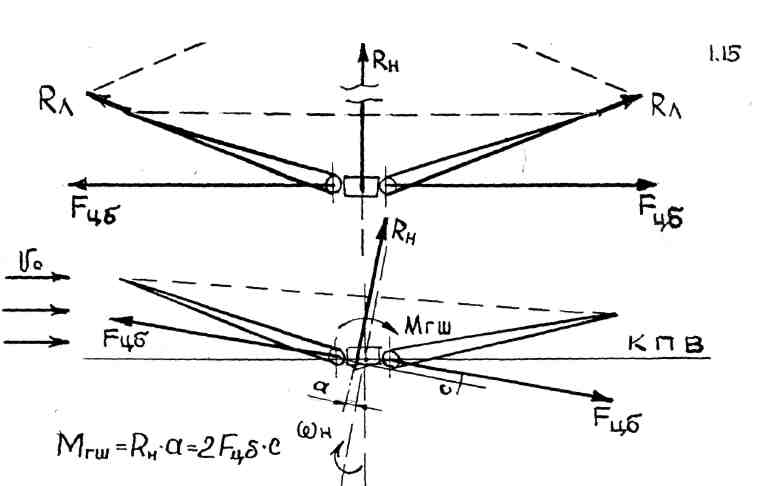
Рис.1.22 Конус вращения несущего винта
При косом обтекании равновесие лопастей непрерывно нарушается и лопасти имеют различное положение над конструктивной плоскостью НВ( см. рис.1.15). При этом углы взмаха зависят от совместного действия различных факторов.
При раздельном рассмотрении этих факторов получается следующая картина. За счет прироста эффективных скоростей и инерционных сил лопасти максимальный взмах получился бы в азимуте 180°. Угол взмаха увеличивается по сравнению с осевым обтеканием и составляет β0 +α1. Минимальный взмах получился бы в азимуте 360°, угол взмаха уменьшился бы при этом на то же значение и составил бы β0 - α1 .
За счет изменения углов атаки на поднимающихся и опускающихся лопастях, вызванных действием встречного потока (рис. I.I4), лопасть должна достигнуть максимального взмаха в азимуте 270°, угол взмаха увеличиться по сравнению с осевым обтеканием и составит β0 +в1. Минимального взмаха лопасть должна достигнуть в азимуте 90°, угол взмаха уменьшиться на то же значение и составит β0 -в1 .
Под влиянием рассмотренных факторов лопасти образуют так называемый заваленный конус вращения, у которого образующие - лопасти, расположенные под разными углами относительно КПВ.
В продольной плоскости (по потоку) конус вращения отклоняется на угол α1 в поперечной плоскости - на угол в1.
Завал конуса вращения может быть естественный (самопроизвольный), вызываемый действием встречного потока, и управляемый, вызываемый циклическим изменением углов установки лопастей (циклического шага) при отклонениях тарелки автомата перекоса в процессе управления вертолетом (рассматривается в следующем разделе).
Если бы не было регулятора взмаха, ось конуса вращения отклонялась бы назад и
влево. Максимальный угол взмаха находился бы в азимуте 200+210°, минимальный - в азимуте 20÷30° (см. рис. 1.15).
Работа регулятора взмаха приводит к снижению амплитуды взмахов, противодействию инерционных сил лопастей, поэтому уменьшается запаздывание маховых колебаний лопастей.
Направление бокового завала конуса вращения изменяется на противоположное - с левого на правое,т. к. изменяются значения азимутов, где углы взмаха (конусности) достигают максимальных и минимальных значений.
Максимальный угол взмаха получается в азимуте 160÷170°, минимальный - в азимуте 340÷350° (рис. I.15). Следовательно, с регулятором взмаха ось конуса вращения отклоняется назад и вправо.
При
наклоне конуса вращения изменяется
положение равнодействующей силы лопасти
![]() относительно
КПВ, так как равнодействующая сила НВ
совпадает
с осью вращения конуса НВ и отклоняется
вместе с ним (рис. I.22).
относительно
КПВ, так как равнодействующая сила НВ
совпадает
с осью вращения конуса НВ и отклоняется
вместе с ним (рис. I.22).
Выводы: I. Под действием встречного потока происходит естественный завал конуса вращения НВ.
2. Без регулятора взмаха конус отклоняется назад и влево, с регулятором взмаха - назад и вправо.
3. Завал конуса вращения НВ сопровождается поворотом вектора равнодействующей НВ в ту же сторону.
Примечание: Боковой завал конуса вправо является более выгодным, так как отклонение равнодействующей вправо частично уравновешивает силу тяги рулевого винта вертолета, что упрощает боковую балансировку вертолета.
Факторами, влияющими на величину завала конуса вращения НВ, являются: скорость встречного потока (поступательного движения, ветра), шаг НВ, частота вращения НВ.
С увеличением скорости встречного потока конус вращения дополнительно заваливается: назад и вправо, так как усиливаются маховые движения, увеличиваются углы конусности α1 и β1.
При увеличении шага НВ при заданной скорости обтекания возрастают амплитуды маховых движений лопастей, конус заваливается назад и вправо.
При увеличении оборотов НВ конус заваливается вперед и влево, так как под действием дополнительных центробежных сил углы взмахов лопастей уменьшаются. Наоборот, при уменьшении оборотов НВ углы взмахов лопастей возрастают ("забрасывание" лопастей), конус вращения заваливается назад и вправо.