

1.9.3 Регулятор взмаха
Интенсивные маховые движения лопастей нежелательны, так как они приводят к следующим отрицательным явлениям:
возрастают динамические нагрузки на конструкцию несущей системы;
возникает опасность удара лопастей по ограничителям ГШ и хвостовой балке;
затрудняется балансировка вертолета в полете при сильной турбулентности воздуха, а также при висении с ветром;
расширяется зона срыва потока на концевых элементах отступающих лопастей;
- возникает явление неустойчивости маховых движений ("заброс" лопастей), вызываемое кинематическим увеличением углов установки лопастей при наличии отставания лопастей относительно ВШ.
Существует несколько способов ослабления маховых движений:
аэродинамическое демпфирование лопастей;
действие центробежных сил лопастей;
применение механического регулятора взмаха.
Первые два способа недостаточны для получения приемлемых динамических характеристик НВ, поэтому в конструкцию системы управления НВ введен механический регулятор взмаха (поводковая компенсация). Регулятор взмаха - это кинематическая связь между подвижным кольцом тарелки автомата перекоса и осевым шарниром (ОШ) лопасти (рис. 1.18).
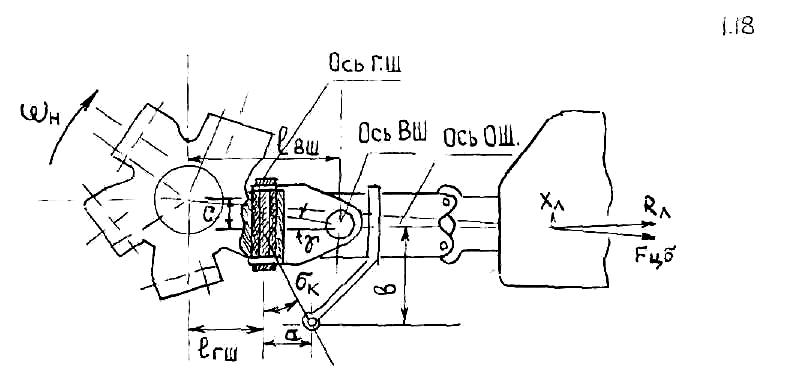
Рис.1.18 Регулятор взмаха лопасти
Конструктивно поводковая компенсация достигается смещением точки крепления тяги управления углами установки лопасти (промежуточного шарнира) параллельно оси ГШ на расстояние а. При этом промежуточный шарнир образует с ГШ угол σк (рис. 1.18).
К=tg σк =а/в — это характеристика регулятора взмаха. Принцип действия регулятора заключается в том, что ось поворота лопасти не совпадает с осью ГШ, а проходит под углом σк .
Это приводит к тому, что при некотором угле взмаха лопасти, например вверх, её передняя кромка проходит путь меньше, чем задняя. Поэтому при движении лопасти вверх она одновременно поворачивается относительно осевого шарнира (ОШ) на уменьшение угла установки .
Происходит уменьшение углов атаки элементов, коэффициента тяги СТ , прироста подъемной силы лопасти Уал. Следовательно, это препятствует увеличению угла взмаха.
При движении вниз лопасть поворачивается на увеличение угла установки, при этом увеличиваются углы атаки, коэффициент СТ и прирост подъемной силы, что препятствует уменьшению угла взмаха лопасти.
Выводы: 1. С помощью регулятора взмаха механическим способом повышается аэродинамическое демпфирование лопастей. Чем больше значение К регулятора, тем значительнее изменение углов установки лопастей при взмахе, тем выше эффективность работы регулятора. Однако с ростом К увеличиваются углы атаки на опускающихся лопастях, быстрее наступает явление срыва потока. Для Ми-8 выбрано оптимальное значение: К = 0,5.
2. Работа регулятора взмаха дает следующие преимущества работы НВ: более равномерное распределение тяг лопастей по ометаемой площади, ускоряется переход НВ на режим самовращения (рассматривается в теме «Особые случаи полета»), НВ имеет более выгодный боковой завал конуса вращения.