

7.4.1. Условия Куна – Таккера и задача Куна - Таккера
Найти векторы
![]() ,
удовлетворяющие следующим условиям:
,
удовлетворяющие следующим условиям:
![]() (21)
(21)
Прежде всего, проиллюстрируем условия Куна – Таккера на примере.
Пример 68.
Минимизировать
![]()
при ограничениях
![]()
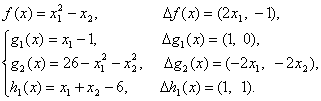
Решение. Записав данную задачу в виде задачи нелинейного программирования (18) – (20), получим
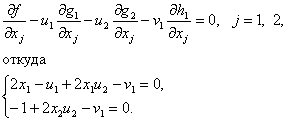
Уравнение (21), входящее в состав условий Куна – Таккера, принимает следующий вид:
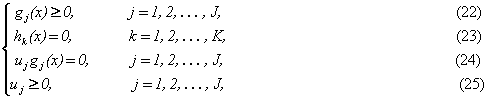
Неравенства (22) и уравнения (23) задачи Куна – Таккера в данном случае записываются в виде
![]()
Уравнения (24), известные как условие дополняющей нежесткости принимают вид
![]()
Заметим, что на переменные u1, u2 накладывается требование неотрицательности, тогда как ограничение на знак v1 отсутствует.
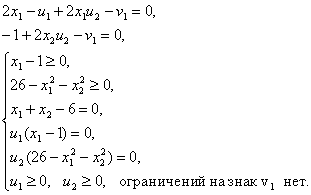
Таким образом, для данной задачи условия Куна – Таккера записываются в следующем виде:
7.5. Теоремы Куна - Таккера
До этого были построены условия Куна – Таккера для задач условной оптимизации. С помощью метода множителей Лагранжа получено интуитивное представление о том, что условия Куна – Таккера тесно связаны с необходимыми условиями оптимальности. В данном разделе рассматриваются строгие формулировки необходимых и достаточных условий оптимальности решения задачи нелинейного программирования.
Теорема 1. Необходимость условий Куна – Таккера.
Рассмотрим задачу нелинейного
программирования (18) – (20). Пусть f,
g, h
– дифференцируемые функции, а х* -
допустимое решение данной задачи.
Положим I={j|
gj(x*)=0}.
Далее пусть
![]() при
при
![]() при
k=1, . . . , K
линейно независимы. Если х* - оптимальное
решение задачи нелинейного программирования,
то существует такая пара векторов (u*,
v*), что (x*,
u*, v*)
является решением задачи Куна – Таккера
(21) – (25).
при
k=1, . . . , K
линейно независимы. Если х* - оптимальное
решение задачи нелинейного программирования,
то существует такая пара векторов (u*,
v*), что (x*,
u*, v*)
является решением задачи Куна – Таккера
(21) – (25).
Условие линейной независимости всегда выполняется для задач нелинейного программирования, обладающих следующими свойствами:
все ограничения в виде равенств и неравенств содержат линейные функции;
все ограничения в
виде неравенств содержат вогнутые
функции, все ограничения-равенства –
линейные функции, а также сществует по
крайней мере одна допустимая точка х,
которая расположена во внутренней части
области, определяемой ограничениями-неравенствами.
Другими словами, существует такая точка
,
что
![]()
Если условие линейной независимости в точке оптимума не выполняется, то задача Куна – Таккера может не иметь решения.
Пример 69.
Минимизировать
![]()
при ограничениях
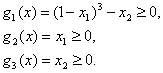
|
|
|
|
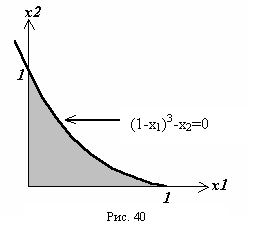
Решение. На
рис. 40 изображена область допустимых
решений сформулированной выше нелинейной
задачи. Ясно, что оптимальное решение
этой задачи есть
![]() Покажем,
что условие линейной независимости не
выполняется в точке оптимума.
Покажем,
что условие линейной независимости не
выполняется в точке оптимума.
Так как
![]() то
I = {1, 3}. Далее
то
I = {1, 3}. Далее

Видно, что векторы
![]() и
и
![]() линейно
зависимы, т.е. условие линейной
независимости в точке х* = (1, 0) не
выполняется.
линейно
зависимы, т.е. условие линейной
независимости в точке х* = (1, 0) не
выполняется.
Запишем условия Куна – Таккера и проверим, выполняются ли они в точке (1, 0). Условия (21), (24) и (25) принимают следующий вид:
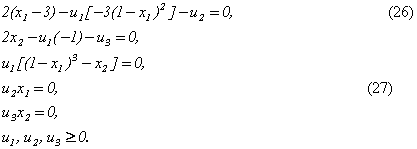
При х* = (1, 0) из уравнения (26) следует, что u2 = -4, тогда как уравнение (27) дает u2 = 0. Следовательно, точка оптимума не является точкой Куна – Таккера.
Замечание. Нарушение условия линейной независимости не обязательно означает, что точка Куна – Таккера не существует.
Теорему Куна – Таккера можно использовать для доказательства того, что заданная допустимая точка, удовлетворяющая условию линейной независимости, не является оптимальной, если она не удовлетворяет условиям Куна – Таккера. С другой стороны, если в этой точке условия Куна – Таккера выполняются, то нет гарантии, что найдено оптимальное решение нелинейной задачи. В качестве примера рассмотрим следующую задачу нелинейного программирования.
Пример 70. Минимизировать f(x) = 1 – x2
при ограничении
![]()
Решение. Здесь
![]()
Запишем условия Куна – Таккера:
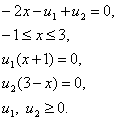
Так как ограничения содержат линейные функции, условие линейной независимости выполняется во всех допустимых точках. Видно, что х = 3 – точка оптимума. Рассмотрим допустимое решение х = 2. Для того, чтобы доказать его неоптимальность, проверим выполнение полученных условий Куна – Таккера. Из уравнений (28), (29) следует, что u1 = u2 = 0; однако значения х = 2, u1 = u2 = 0 не удовлетворяют исходному уравнению. Следовательно, по теореме 1, точка х = 2 не может быть оптимальной.
С другой стороны, решение х = u1 = u2 = 0 удовлетворяет системе всех полученных первоначально неравенств и уравнений и, следовательно, определяет точку Куна – Таккера, однако оптимальным не является. Согласно теореме 1, условия Куна – Таккера должны выполняться в точке оптимума х = 3. Нетрудно проверить, что решение х = 3, u1 = 0, u2 = 6 удовлетворяет условиям Куна – Таккера.
Следующая теорема устанавливает условия, при выполнении которых точка Куна – Таккера автоматически соответствует оптимальному решению задачи нелинейного программирования.
Теорема 2. Достаточность условий Куна – Таккера
Рассмотрим задачу нелинейного программирования
минимизировать f(x)
при ограничениях
![]()
Пусть целевая функция f(x) выпуклая, все ограничения в виде неравенств содержат вогнутые функции gj(x), j=1, … , J, а ограничения в виде равенств содержат линейные функции hk(x), удовлетворяющие условиям Куна – Таккера
то х* - оптимальное решение задачи нелинейного программирования.
Замечание. Если условия теоремы 2 выполняются, то нахождение точки Куна – Таккера обеспечивает получение оптимального решения задачи нелинейного программирования. Теорему можно использовать для доказательства оптимальности данного решения.
Пример 71. Минимизировать
при ограничениях
![]()
Решение. С
помощью теоремы 2 докажем, что решение
![]() является
оптимальным. Имеем
является
оптимальным. Имеем
![]()
Так как матрица Hf(x) положительно полуопределена при всех х, функция f(x) оказывается выпуклой. Первое ограничение в виде неравенства содержит линейную функцию g1(x), которая одновременно является как выпуклой, так и вогнутой. Для того, чтобы показать, что функция g2(x) является вогнутой, вычислим
![]()
Поскольку матрица
![]() отрицательно
определена, функция g2(x)
является вогнутой. Функция h1(x)
входит в линейное ограничение в виде
равенства. Следовательно, все условия
теоремы
2 выполнены;
если мы покажем, что х*
= (1, 5) – точка
Куна – Таккера, то действительно
установим оптимальность решения х*.
отрицательно
определена, функция g2(x)
является вогнутой. Функция h1(x)
входит в линейное ограничение в виде
равенства. Следовательно, все условия
теоремы
2 выполнены;
если мы покажем, что х*
= (1, 5) – точка
Куна – Таккера, то действительно
установим оптимальность решения х*.
Условия Куна – Таккера для данного примера имеют вид
Точка х* = (1, 5) удовлетворяет полученным ограничениям и, следовательно, является допустимой. Полученные уравнения принимают следующий вид:
![]()
Положив v1 = 0, получим u2 = 0.1 и u1 = 2.2. Таким образом, решение х* = (1, 5), u* = (2.2, 0.1) и v1 = 0 удовлетворяет условиям Куна – Таккера. Поскольку условия теоремы 2 выполнены, то х* = (1, 5) – оптимальное решение задачи. Заметим, что существуют также и другие значения u1, u2, v1, которые удовлетворяют условиям Куна – Таккера, построенным для задачи.
Замечание.
1) Для встречающихся на практике задач условие линейной независимости, как правило, выполняется. Если в задаче все функции дифференцируемы, то точку Куна – Таккера следует рассматривать как возможную точку оптимума. Таким образом, многие из методов нелинейного программирования сходятся к точке Куна – Таккера.
2) Если условия теоремы 2 выполнены, точка Куна – Таккера в то же время оказывается точкой глобального минимума. К сожалению, проверка достаточных условий весьма затруднительна, и, кроме того, прикладные задачи часто не обладают требуемыми свойствами. Следует отметить, что наличие хотя бы одного нелинейного ограничения в виде равенства приводит к нарушению предположений теоремы 2.
3) Достаточные условия, установленные теоремой 2, можно обобщить на случай задач с невыпуклыми функциями, входящими в ограничения в виде неравенств, невыпуклыми целевыми функциями и нелинейными ограничениями-равенствами.