

4. Кинематика машинно-тракторных агрегатов
Кинематика МТА – изучает способы движения мобильных агрегатов с рабочими и холостыми ходами при выполнении технологических операций на участках работ. При обосновании способов движения МТА учитываются следующие показатели: кинематический центр, кинематическая длина, длина выезда агрегата, радиус и центр поворота, ширина агрегата и др.
Значения этих показателей зависят от конструктивных особенностей трактора и рабочих машин, сцепки, состава и особенностей комплектования агрегата.
Способ движения МТА – это закономерная последовательность его перемещения по полю в процессе работы с циклично повторяющимися элементами: формой траектории с рабочими и холостыми ходами, видами и радиусами поворотов и др.
Кинематика МТА – изучает способы движения мобильных агрегатов с рабочими и холостыми ходами при выполнении технологических операций на участках работ. При обосновании способов движения МТА учитываются следующие показатели: кинематический центр, кинематическая длина, длина выезда агрегата, радиус и центр поворота, ширина агрегата и др.
Значения этих показателей зависят от конструктивных особенностей трактора и рабочих машин, сцепки, состава и особенностей комплектования агрегата.
Кинематическим центром агрегата называется условная геометрическая точка, траектория которой на плоскости движения имитирует траекторию движения МТА на поворотах и при выполнении рабочих ходов. Кинематический центр для МТА с колесными тракторами определяется как проекция середины задней ведущей оси на плоскость движения. У МТА с гусеничными тракторами кинематический центр соответствует точке пересечения диагоналей, проведенных через наружные края гусениц.
Кинематической длиной агрегата (lк) называется проекция расстояния от кинематического центра агрегата до точки пересечения линии, перпендикулярной продольной оси трактора и проходящей через наиболее удаленные по ходу МТА окончания рабочих органов машин при прямолинейном движении. Кинематическая длина агрегата состоит из кинематических длин трактора, сцепки и рабочих машин.
Длиной выезда агрегата (l) называется расстояние на которое перемещается центр агрегата от контрольной линии (границы обрабатываемого участка) перед началом и в конце поворота по ходу МТА. Длина выезда агрегата, как правило, превышает кинематическую длину агрегата, так как необходимо дополнительное расстояние для вывода или ввода рабочих органов машины в режим холостого или рабочего хода:
l = е + lк,
где е – дополнительный путь для вывода рабочих органов при выезде в режим холостого хода и для их ввода при въезде в режим рабочего хода.
Радиусом поворота агрегата называется расстояние от кинематического центра агрегата до центра поворота на плоскости движения.
Шириной агрегата называется расстояние между наиболее удаленными внешними точками по ширине при прямолинейном движении агрегата.
4.1 Выбор способа движения и вида поворотов агрегата
Движение машинно-тракторных агрегатов при обработке участков характеризуется определенной цикличностью. В каждый цикл входят рабочий ход и поворот для изменения направления движения на обратное или под некоторым углом к законченному рабочему ходу. К элементам движения агрегатов относятся также дополнительные заезды и переезды.
Способы движения МТА (рис.1) и виды поворотов (рис.2) зависят от вида выполняемой работы, предъявляемых агролесотехнических требований, конструктивных особенностей рабочих машин, систем соединения с трактором и других факторов.
При работе различных МТА на одной и той же обрабатываемой площади (особенно на вырубке) кинематика их отличается незначительно. Поэтому студенты в курсовой работе разрабатывают кинематику только одного агрегата из числа применяемых в технологической карте.
Студенты должны выбрать способ движения агрегата и вид поворота и в зависимости от основных кинематических данных агрегата определить длину холостого хода (Lх.х) одного поворота агрегата и наименьшую ширину поворотной полосы (Е). Зависимость длины холостого хода одного поворота и ширины поворотной полосы от кинематических параметров агрегата и вида поворота приведены в таблице 2.
Таблица 2
Влияние вида поворота на ширину поворотной полосы
и длину холостого хода МТА
Виды поворота |
Ширина поворотной полосы Е |
Длина холостого хода Lх одного поворота агрегата |
Беспетлевые: - круговой - с прямым участком - угловой |
1,1R+0,5В+l 1,1R+0,5В+l 1,1R+0,5В+l |
(3,2…4,0)R+2l (1,4…2,0)R+X+2l (1,6…1,8)R+2l |
Петлевые: - грушевидный - односторонний - закрытая петля |
2,8R+0,5В+l 2,6R+0,5В+l 2,0R+0,5В+l |
(6,6…8,0)R+2l (6,0…7,5)R+2l (5,0…6,5)R+2l |
Только с навесными орудиями: - с открытой петлей - с закрытой петлей - угловая петля - игольчатый |
1,1R+0,5В+l 1,1R+0,5В+l 1,2R+0,5lтр+l 1,2R+0,5lтр+l |
(4,1…5,0)R+2l (5,0…5,5)R+2l (2,5…3,5)R+2l (2,8…4,0)R+2l |
Примечания: R – радиус поворота агрегата, м; В – ширина агрегата, м; l – длина выезда (въезда) агрегата, м; Х – длина прямого хода на поворотной полосе, м; lтр – длина трактора, м.
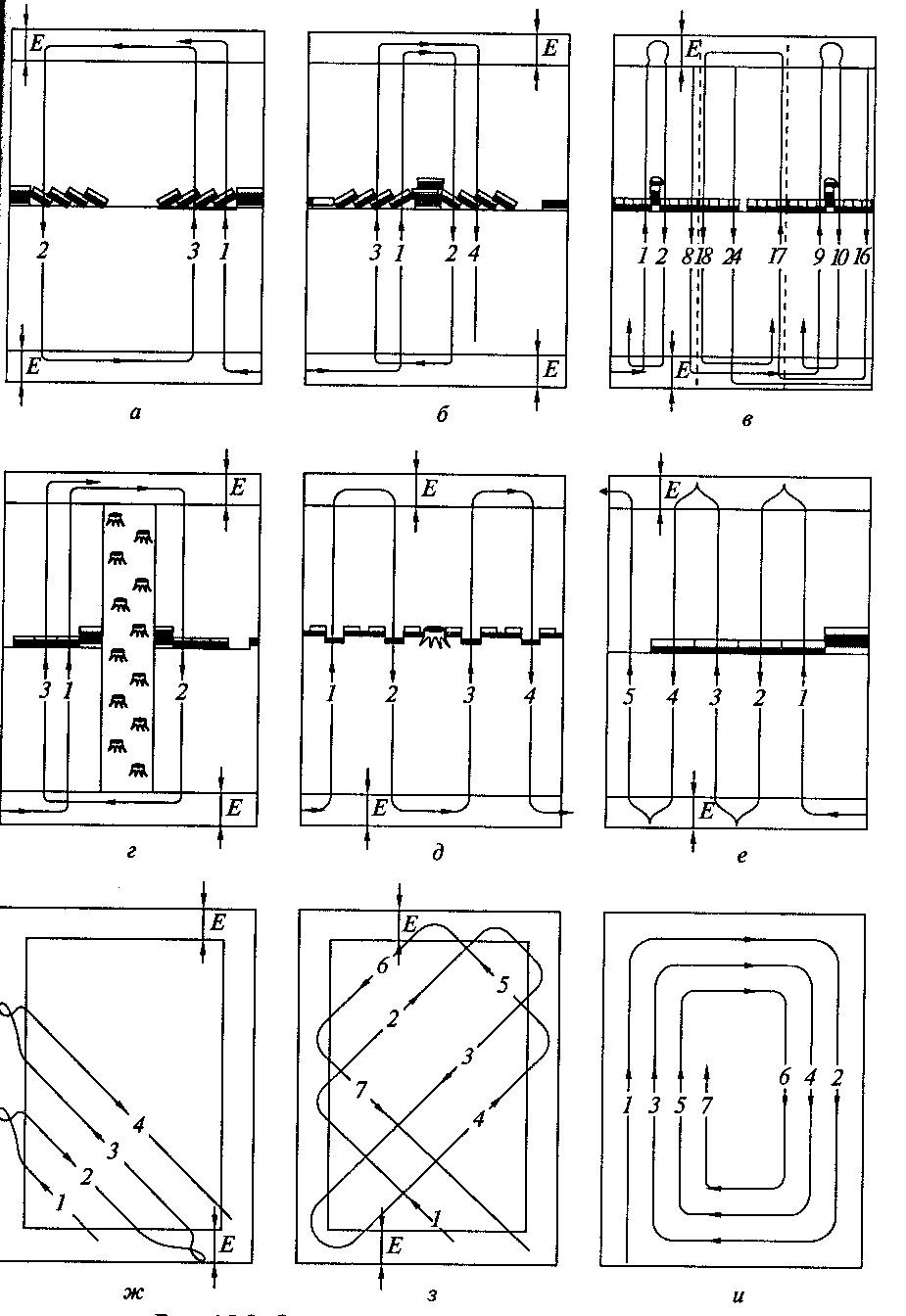
Рисунок 1. Основные способы движения МТА:
вразвал (а); всвал (б); чередованием способов всвал и развал (в); комбинированный (г); челночный (д); реверсивный (е); диагональный (ж); диагонально-поперечный (з); круговой (и); Е – ширина поворотной полосы

Рисунок 2. Основные виды поворотов лесохозяйственных агрегатов:
беспетлевые (а – круговой; б – с прямым участком; в – угловой); петлевые (г - грушевидный; д – односторонний; е – закрытая петля; ж – грибовидный с открытой петлей; з – грибовидный с закрытой петлей; и – угловая петля); Х – длина прямого хода на поворотной полосе; Во – ширина захвата лесохозяйственного агрегата; Е – ширина поворотной полосы; lа – длина агрегата; lт – длина трактора; R – радиус поворота
В практических расчетах радиус поворота принимается: для прицепных агрегатов с зубовыми боронами со сцепкой – равным ширине агрегата; с культиваторами, сеялками – 0,7-0,8 ширины МТА, в зависимости от числа машин в его составе. Для МТА с навесными рабочими машинами наименьший радиус поворота равен конструктивному радиусу поворота трактора.
При определении длины выезда агрегата (l), состоящего из колесного трактора и навешанных сзади рабочих машин, а также агрегатов с большим радиусом поворота принимают е = 0,1lк. Для агрегатов с прицепными машинами е = 0,5…0,75lк.
По направлению рабочих ходов различают три основные способа движения машинно-тракторных агрегатов: гоновые, комбинированные, челночные, реверсивные, диагональные и круговые.
При гоновых способах движения МТА выполняет рабочие ходы параллельно одной или двум сторонам рабочего участка с холостыми поворотами на обеих его концах. На прямоугольных участках с гоновым способом движения МТА наибольший эффект достигается при направлении гона агрегата по длинной стороне загона, так как в таких случаях уменьшается число поворотов.
К данной группе относятся способы движения МТА вразвал, всвал, чередование по загонам. Данные способы движения являются основными при основной вспашке лемешными многокорпусными плугами при обработке почвы в лесных питомниках, защитном лесоразведении. Основное преимущество способа чередования по загонам состоит в уменьшении числа свальных гребней и развальных борозд по сравнению с движением только всвал или вразвал.
Комбинированный способ движения позволяет уменьшить величину поворотных полос, повысить качество вспашки, уменьшить число развальных борозд. Этот способ применяется для частичной широкополосной обработке почвы для производства лесных культур, при защитном лесоразведении.
Челночный способ движения наиболее эффективен для простых одномашинных высокоманевренных МТА при выполнении таких операций, как частичная обработка почвы на вырубках, гладкая вспашка оборотными плугами на небольших участках лесных питомников.
Реверсивный способ движения применяется при выполнении механизированных работ в особо сложных условиях (лесоразведение на склонах и др.) при условии комплектования МТА с использованием тракторов, которые имеют фронтальные и задние навесные устройства для одновременного присоединения рабочих машин.
Диагональный способ движения применяется с целью достижения лучшего качества работ при бороновании, перекрестной междурядной культивации, когда рабочие ходы МТА необходимо выполнять под определенным углом к сторонам загона.
При круговом способе движения рабочие ходы совершаются без выключения рабочих органов вдоль всех четырех и более сторон рабочего участка. Круговые движения могут быть направлены от периферии к центру и, наоборот. В ряде случаев при изменении направления движения на угловых поворотах рабочие машины могут переводиться и в нерабочее положение.
Движение МТА в процессе работы на участке состоит из рабочих ходов и поворотов. При выборе вида поворота учитываются следующие требования: возможность его исполнения; соблюдение условий техники безопасности; достижение наибольшей производительности МТА и наименьшего расхода топлива, оставление возможно меньшей ширины поворотной полосы. Наиболее широко применяются на практике следующие группы поворотов: беспетлевые, петлевые и игольчатые.
Беспетлевые повороты делятся на три вида: круговой, поворот с прямым участком и угловой.
Из группы петлевых поворотов наиболее часто применяются грушевидный, односторонний и поворот с закрытой петлей.
Игольчатые повороты применяются при реверсивном способе движения МТА с фронтальной и задней навеской рабочих машин.