

30 Период волны
Каждая
волна характеризуется определенными
элементами.
 Общими
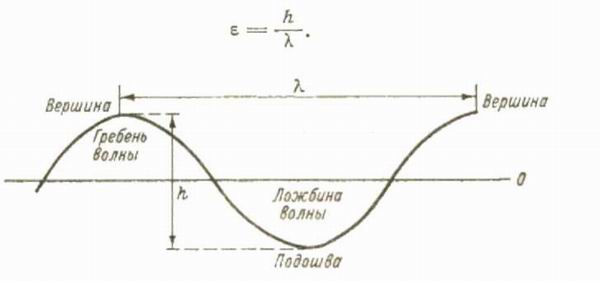
элементами для волн являются:
—
вершина — наивысшая точка гребня
волны;
—
подошва — наинизшая точка ложбины
волны;
—
высота (h) — превышение вершины волны;
—
длина (Л)—горизонтальное расстояние
между вершинами двух смежных гребней
на волновом профиле, проведенном в
генеральном направлении распространения
волн;
—
период (т) — интервал времени между
прохождением двух смежных вершин волн
через фиксированную вертикаль; другими
словами, это промежуток времени, в
течение которого волна проходит
расстояние, равное своей длине;
—
крутизна (е) — отношение высоты данной
волны к ее длине. Крутизна волны в
различных точках волнового профиля
различна.
Общими
элементами для волн являются:
—
вершина — наивысшая точка гребня
волны;
—
подошва — наинизшая точка ложбины
волны;
—
высота (h) — превышение вершины волны;
—
длина (Л)—горизонтальное расстояние
между вершинами двух смежных гребней
на волновом профиле, проведенном в
генеральном направлении распространения
волн;
—
период (т) — интервал времени между
прохождением двух смежных вершин волн
через фиксированную вертикаль; другими
словами, это промежуток времени, в
течение которого волна проходит
расстояние, равное своей длине;
—
крутизна (е) — отношение высоты данной
волны к ее длине. Крутизна волны в
различных точках волнового профиля
различна.
Период волны т - промежуток времени, в течение которого гребень волны перемещается по горизонтальному направлению на расстояние длины волны. Величина, обратная периоду, называется частотой волны.
31. Особенности бурения морских скважин. См. Вопрос № 25.
32. Мсп, закрепляемые сваями
Гравитационно-свайные морские стационарные платформы (МСП). Гравитационно-свайные МСП не сдвигаются с места установки благодаря не только собственной массе конструкции, но и за счет дополнительного крепления сваями опорной их части к морскому дну. МСП этого типа бывают различных конструкций, как по конфигурации сооружения, так и сочетанию применяемых материалов. Гравитационно-свайные основания на глубине более 300 м в большинстве случаев представляют собой форму треноги. Конструкция опорной части состоит из центральной колонны большого диаметра, поддерживаемой тремя наклонными опорами.Колонны могут быть в виде сплошных металлических цилиндров больших диаметров или элементов ферменной конструкции. Центральные колонны и боковые наклонные опоры в средней части связываются горизонтальными элементами жесткости и раскосами. Конструкция МСП устанавливается на четыре донных фундамента, закрепленных сваями и связанных между собой А-образной стальной рамой )
33. Виды опоры спбу
Существует ряд конструкций и типов СПБУ. Их различают по конструкции корпуса, числу и конструкции опорных колонн и подъемных устройств. Ha определение числа опорных колонн влияет ряд факторов: глубина моря, гидрометеорологические условия, способ задавливания опорных колонн в грунт и извлечение их из грунта, морское дно, общая масса поднимаемого корпуса, технологичность и трудоемкость изготовления и др. На больших глубинах возрастают волновые нагрузки на каждую колонну.
Поэтому на глубинах более 60 м в установках применяют не более четырех опор со значительным преобладанием установок с тремя опорами и начиная с глубины 90 м используют установки только с тремя опорами.
Установки с цилиндрическими опорами применяют на глубинах до 45 м (примерно 65—70%) и в диапазоне глубин 45—75м — установки с цилиндрическими и ферменными опорами, а на глубинах свыше 75м используют установки только с ферменными опорами. Конструкции ферменных опор проектируют прямоугольной, квадратной и треугольной формы. Наиболее удачная конструкция — опора треугольного сечения. Последняя удачно вписывается в треугольную форму корпуса и имеет относительно меньшее число элементов, подверженных воздействию волн. Нижние концы опор заканчиваются башмаками или общей опорной плитой, связывающей опорные колонны между собой.
Механизмы подъемных устройств применяют механические или гидравлические. В мировой практике предпочтение отдается механическим механизмам подъема. Обусловливается это простотой конструкции (они менее сложны в эксплуатации) и другими факторами. Механические устройства подъема, состоящие из зубчатой рейки, встроенной в конструкцию опор, установлены на корпусе шестеренчатого механизма, шестерня которого находится постоянно в зацеплении с рейкой. Привод механизма осуществляется от электродвигателя с редуктором или гидродвигателя. Имеются подъемные устройства, состоящие из пары ведущих колес, находящихся в зацеплении с двойной зубчатой рейкой. Число пар ведущих колес может быть от двух до шести и более в зависимости от грузоподъемности подъемной системы СПБУ.
34 Стабилизация динамическая.На глубинах моря более 200 м все плавучие буровые средства оснащают динамической системой стабилизации (динамического позицирования).
На глубинах морей более 200 м якорные системы стабилизации не обеспечивают требуемые допускаемые отклонения ПБС о вертикальной оси бурящейся скважины, становятся массивными, и их применение неэффективно. По этим причинам на глубинах более 200 м используют динамические системы стабилизации (динамического позицирования), которые по сравнению с якорными системами удержания имеют следующие преимущества:
- Обеспечивают требуемую технологией бурения точность позицирования ПБС;
- Осуществляют быстрое изменение курса БС или ППБУ в целях уменьшения бортовой и вертикальной качек;
- Обеспечивают быстрый уход с точки бурения и возврат на нее ПБС.
Система динамической стабилизации представляет собой замкнутую цепь автоматического управления. Она включает:
1. Цепь обратной связи с датчикам, определяющими координаты продольного и поперечного перемещения по осям х, у и угол поворота φ ПБС относительно принятых неподвижных координат;
2. блок сравнения, который определяет отклонения по осям и углу поворота действующего положения ПБС от его начального расчетного положения;
3. пульты управления, имеющие прямые и обратные связи с двигателями и гребными винтами, рассчитывающие и подающее командного пункта на двигатели и гребные винты команды для возвращения ПБС в начальное положение.;
4. подруливающие устройства (двигателей и гребных винтов), обеспечивающие перемещение судна на величину Δх, Δу иΔφи возвращение его в начальное положение.
На автоматизированном пункте управления универсальная ЭВМ по цепи обратной связи получает данные от внешних датчиков о положении ПБС в определенный момент. В системе динамической стабилизации имеются две ЭВМ: одна работает, а вторая в резерве. Система автоматической стабилизации включается в работу и контролируется оператором с главного пульта управления.