

14 Способы эксплуатации морских скважин.
Существуют несколько видов эксплуатации скважин: фонтанный, газлифтный, насосный и другие. Под эксплуатацией добывающих скважин понимается их использование в технологических процессах подъема из пласта на поверхность продукции пласта (нефти, конденсата, газа, воды).
Ф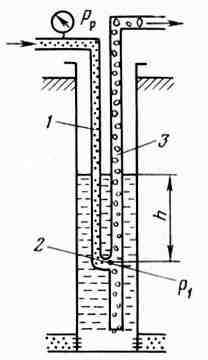 онтанирование
скважин обычно происходит на вновь
открытых месторождениях нефти, когда
запас пластовой энергии велик, т. е.
давление на забоях скважин достаточно
большое, чтобы преодолеть гидростатическое
давление столба жидкости в скважине,
противодавление на устье и давление,
расходуемое на преодоление трения,
связанное с движением этой жидкости.
онтанирование
скважин обычно происходит на вновь
открытых месторождениях нефти, когда
запас пластовой энергии велик, т. е.
давление на забоях скважин достаточно
большое, чтобы преодолеть гидростатическое
давление столба жидкости в скважине,
противодавление на устье и давление,
расходуемое на преодоление трения,
связанное с движением этой жидкости.
Г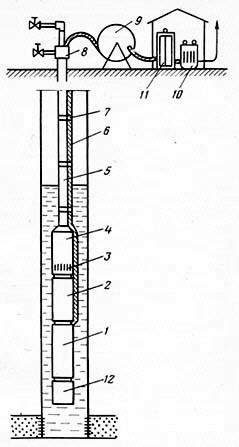 азлифтная
скважина
- это по существу та же фонтанная скважина,
в которой недостающий для
необходимогоразгазирования жидкости
газ подводится с поверхности по
специальному каналу (рис.). По колонне
труб 1 газ с поверхности подается к
башмаку 2, где смешивается с жидкостью,
образуя ГЖС, которая поднимается на
поверхность по подъемным трубам 3.
Закачиваемый газ добавляется к газу,
выделяющемуся из пластовой жидкости.
В результате смешения газа с жидкостью
образуется ГЖС такой плотности, при
которой имеющегося давления на забое
скважины достаточно для подъема жидкости
на поверхность.
азлифтная
скважина
- это по существу та же фонтанная скважина,
в которой недостающий для
необходимогоразгазирования жидкости
газ подводится с поверхности по
специальному каналу (рис.). По колонне
труб 1 газ с поверхности подается к
башмаку 2, где смешивается с жидкостью,
образуя ГЖС, которая поднимается на
поверхность по подъемным трубам 3.
Закачиваемый газ добавляется к газу,
выделяющемуся из пластовой жидкости.
В результате смешения газа с жидкостью
образуется ГЖС такой плотности, при
которой имеющегося давления на забое
скважины достаточно для подъема жидкости
на поверхность.
Рис. Принципиальная схема газлифта
Эксплуатация скважин погружными центробежными электронасосами
Центробежные насосы для откачки жидкости из скважины принципиально не отличаются от обычных центробежных насосов, используемых для перекачки жидкостей на поверхности земли.. Внешне они ничем не отличаются от трубы, но внутренняя полость такой трубы содержит большое число сложных деталей, требующих совершенной технологии изготовления.
Погружные центробежные электронасосы (ПЦЭН) - это многоступенчатые центробежные насосы с числом ступеней в одном блоке до 120, приводимые во вращение погружным электродвигателем специальной конструкции (ПЭД).
рис. – Установка ПЦЭН включает маслозаполненный электродвигатель ПЭД 1; звено гидрозащиты или протектор 2; приемную сетку насоса для забора жидкости 3; многоступенчатый центробежный насос ПЦЭН 4; НКТ 5; бронированный трехжильный электрокабель 6; пояски для крепления кабеля к НКТ 7; устьевую арматуру 8; барабан для намотки кабеля при спуско-подъемных работах и хранения некоторого запаса кабеля 9; трансформатор или автотрансформатор 10; станцию управления с автоматикой 11 и компенсатор 12.
15 Что такое мелководная акватория? Это такие участки моря, в которых глубина участков моря не превышает 20 м или же в пределах 1 морской мили от любой такой акватории.Есть наработки по концептуальным проектам мелководных самоподъёмных буровых установок и даже на воздушной подушке.
16.Системы удержания плавучих буровых средств (пбс).
В зависимости от глубины моря все ПБС оснащают одной из следующих возможных систем удержания на точке бурения:
- при глубинах моря до 200 м – с помощью якорных цепей или тросов, либо комбинированной системы (якорных цепей и тросов);
- на глубинах моря более 200 м – с помощью динамической системы стабилизации (динамического позицирования).
Якорные системы удержания
 Буровоеплавсредство
и систему заякоривания рассматривают
как единый комплекс, за исключением
случаев экстремальных погодных условий.
Система заякоривания включает якорные
цепи, лебедку, стопорное устройство,
роульс (устройство для изменения
направления перемещения якорного
троса). В зависимости от местных условий,
характеристики бурового плавсредства
и других факторов применяют различные
схемы расположения якорных цепей или
канатов относительно ПБС.
Буровоеплавсредство
и систему заякоривания рассматривают
как единый комплекс, за исключением
случаев экстремальных погодных условий.
Система заякоривания включает якорные
цепи, лебедку, стопорное устройство,
роульс (устройство для изменения
направления перемещения якорного
троса). В зависимости от местных условий,
характеристики бурового плавсредства
и других факторов применяют различные
схемы расположения якорных цепей или
канатов относительно ПБС.
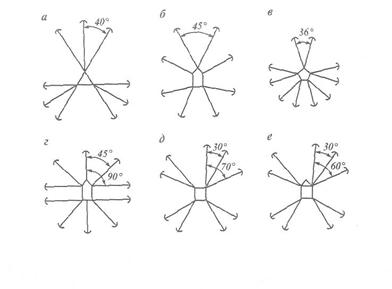
Рис. 15- Типовых вариантов систем заякоривания: а, б, в – симметричные системы соответственно с n-9,8,10; г, д, е – системы с якорными канатами (n = 8), расположенными соответственно под углом 45-900 друг к другу, под углом 30-700 к оси платформы и под углом 30-600 к продольной оси судна.
Якорные системы оснащают комплексом оборудования для регулирования натяжения якорных канатов, который включает тензометры и записывающую аппаратуру, непрерывно управляющую натяжением якорного каната и извещающую оператора об изменении высоты волны или направления ветра. Системой управляют с пульта на основе информации, получаемой от датчиков, устанавливаемых на тросах.
Система динамической стабилизации.
На глубинах морей более 200 м якорные системы стабилизации не обеспечивают требуемые допускаемые отклонения ПБС о вертикальной оси бурящейся скважины, становятся массивными, и их применение неэффективно. По этим причинам на глубинах более 200 м используют динамические системы стабилизации (динамического позицирования), которые по сравнению с якорными системами удержания имеют следующие преимущества:
- Обеспечивают требуемую технологией бурения точность позицирования ПБС;
- Осуществляют быстрое изменение курса БС или ППБУ в целях уменьшения бортовой и вертикальной качек;
- Обеспечивают быстрый уход с точки бурения и возврат на нее ПБС.
Система динамической стабилизации представляет собой замкнутую цепь автоматического управления. Она включает:
1. Цепь обратной связи с датчикам, определяющими координаты продольного и поперечного перемещения по осям х, у и угол поворота φ ПБС относительно принятых неподвижных координат;
2. блок сравнения, который определяет отклонения по осям и углу поворота действующего положения ПБС от его начального расчетного положения;
3. пульты управления, имеющие прямые и обратные связи с двигателями и гребными винтами, рассчитывающие и подающее командного пункта на двигатели и гребные винты команды для возвращения ПБС в начальное положение.;
4. подруливающие устройства (двигателей и гребных винтов), обеспечивающие перемещение судна на величину Δх, Δу иΔφи возвращение его в начальное положение.
На автоматизированном пункте управления универсальная ЭВМ по цепи обратной связи получает данные от внешних датчиков о положении ПБС в определенный момент. В системе динамической стабилизации имеются две ЭВМ: одна работает, а вторая в резерве. Система автоматической стабилизации включается в работу и контролируется оператором с главного пульта управления.