

4 Синтез регуляторов эмс
4.1 Синтез регуляторов вспомогательных координат
Эквивалентное сопротивление объекта АИН-АД

Расчет регуляторов
Рассчитаем регулятор выпрямленного тока:
Постоянная времени фильтра:

Передаточная функция регулятора тока:


Рис 4.1 Модель регулятора тока в Matlab
Передаточная функция регулятора напряжения:


Рис 4.2 Модель регулятора напряжения Matlab
4.2 Синтез регуляторов главных координат
Передаточную функцию регулятора скорости можно принять такой же , как и у регулятора напряжения. Коэффициенты обратной связей подбираем экспериментальным путем на модели в Matlab Simulink.
Передаточная функция регулятора скорости:

Рис 4.3 Модель регулятора скорости Matlab
4.3 Исследование устойчивости и анализ качества регуляторов ЭМС
Рис
4.4 Модель ЭМС в Matlab
Simulink

Штатная система управления ЭП которая была установлена ранее на объекте модернизации не позволяла получить желаемых показателей качества регулирования. В связи с этим релейно-контакторная схема была заменена частотным преобразователем и как следствие двигателем с коротко замкнутым ротором. Благодаря этому удалось добиться желаемых показателей качество регулирования ЭП, чему способствует ниже приведенные критерии устойчивости Найквиста и Боде.
Проверим устойчивость по критериям Найквиста:










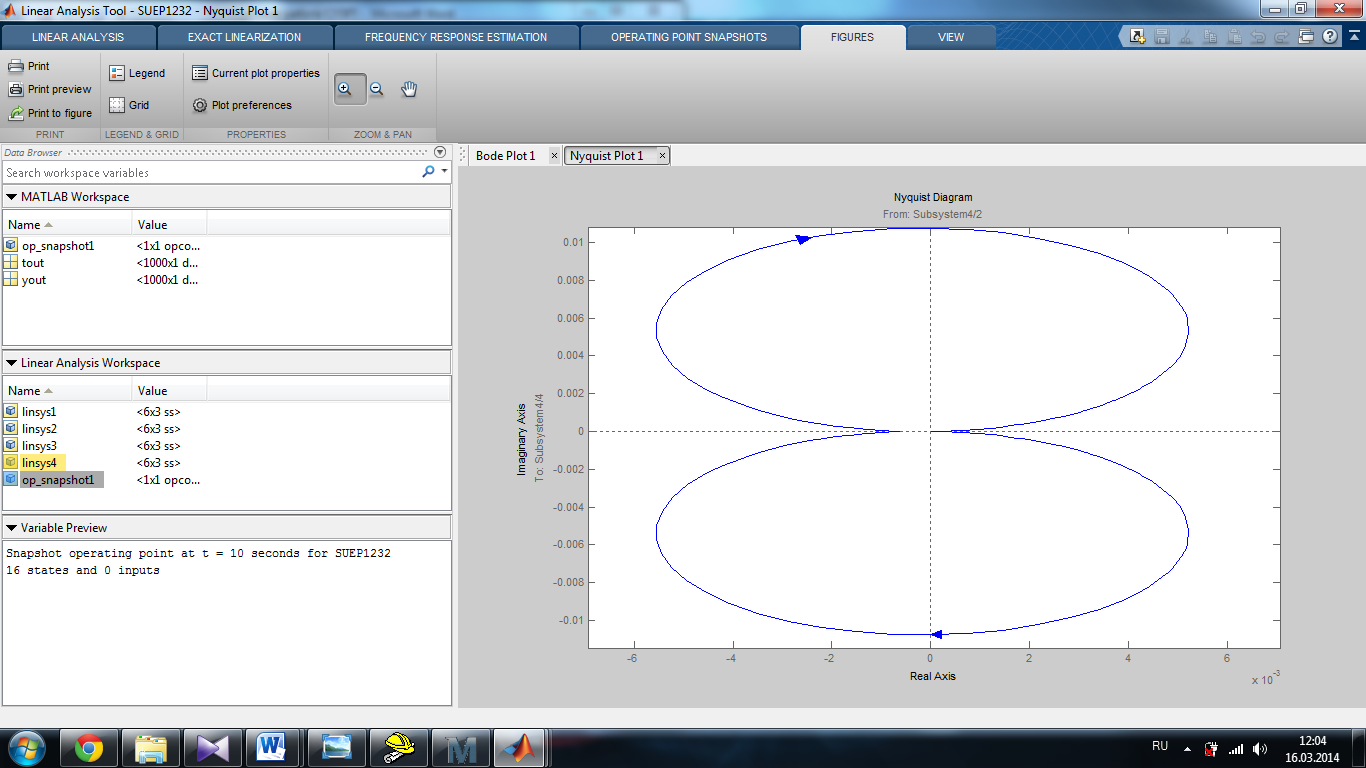







График 4.1 Графики устойчивости ЭМС по Найквисту
Проверим устойчивость по критериям Боде:






График 4.2 Графики устойчивости ЭМС по Боде
5 Исследование механических характеристик эмс
5.1 Статическая характеристика объекта управления
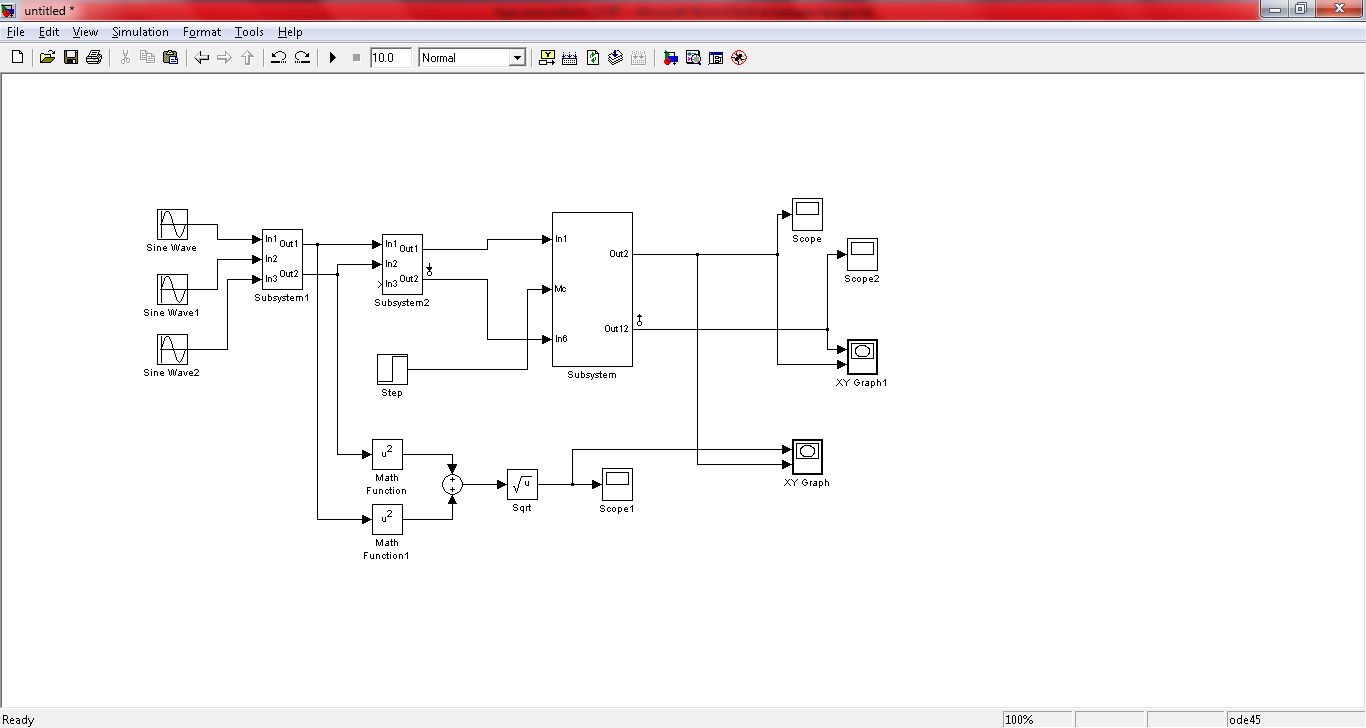
Рис 5.1 Модель объекта в Matlab Simulink
Параметры системы, полученные в результате расчета в отношении соответствия требованиям технологического процесса нельзя считать удовлетворительными т.к. колебательность и время регулирования системы слишком велики. Причиной данного недостатка является отсутствие регуляторов, благодаря которым система будет работать более корректно.
Исходя из графиков переходных процессов можно сделать вывод, необходимо снизить колебательность и изменить время регулирования. Оптимизируем систему методом проб и ошибок, подключая регуляторы и подбирая коэффициеты обратных связей. Все вышеизложенное можно проанализировать на графиках скорости и момента, которые приведены ниже.

График 5.1 График скорости объкта

График 5.2 График момента объекта
5.2 Статическая характеристика эмс
Рис
5.3 Модель ЭМС со скалярным управлением
в Matlab
Simulink

После подключения регуляторов тока, напряжения и скорости система становится более устойчивой. Устойчивостью называют свойство системы возвращаться в исходный или новый установившейся режим после всякого выхода из него в результате какого – либо воздействия.

График 5.3 График скорости ЭМС

График 5.4 График тока ЭМС