

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬНЫ ТОМСКИЙ
ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Наименование института – Институт дистанционного образования.
Наименование направления – 220301 Автоматизация процессов и производств (в нефтегазовой отрасли).
Наименование кафедры – ИКСУ.
Лабораторная работа №2
По курсу «Теория автоматического управления часть 2»
Вариант 5 (25)
Выполнил:
студент группы З – 8201 Фомин Е.П.
Преподаватель: Рожнев Иван Николаевич
Дата ____ ______________ 2014 г.
Томск 2014
Цель работы: Ознакомиться с методикой настройки ПИД-регулятора методами: Шубладзе, Циглера-Никольса, Куна – «правило Т-суммы» и Шеделя. Провести исследование настройки ПИД-регулятора и сравнительный анализ данных методов настройки на основе использования пакета Simulink среды MATLAB.
Задание. Для заданного в таблице 1 варианта системы на рисунке 2 провести эксперименты по п. 2.2, 2.3, 2.4 2.5 (методических указаний), произвести настройку ПИД регуляторов. Рассчитать коэффициенты настройки ПИД регуляторов по каждому из методов. Построить графики, иллюстрирующие характер и показатели качества переходного процесса по каждому из методов. Произвести сравнительный анализ методов настройки ПИД регуляторов. Ответить на контрольные вопросы.

Рисунок 1. Структурная схема САР с ПИД регулятором.
Таблица 1.
Номер варианта |
Передаточная функция объекта управления |
|
|
|
|
5 |
|
|




Рассмотрим, как ведет себя система без регуляторов. Для этого запустим пакет Simulink среды MATLAB. Создадим нашу систему (рисунок 2), и проанализируем полученные характеристики системы.

Рисунок 2. Исследуемая САР без регуляторов.

Рисунок 3. График переходного процесса функции W(1) без регулятора.

Рисунок 4. График переходного процесса функции W(2) без регулятора.
Проанализируем полученные результаты.
Для W(1): при входном значении воздействующего сигнала r=1 установившееся значение выходного сигнала составило y=0,8. Коэффициент передачи системы составил 0,8. Время переходного процесса tп составило 2030 с. Установившаяся ошибка e=20%. Перерегулирование относительно установившегося состояния системы составило σ=53,6%.
Для W(2): при входном значении воздействующего сигнала r=1 система не стабилизировалась.
Теперь необходимо добавить в нашу систему ПИД регулятор (рисунок 5), для настройки его коэффициентов.
Рисунок 5. САР с ПИД регуляторами.
Настройка методом Циглера-Никольса.
В функционирующей системе выключаются интегральная и дифференциальная составляющие ПИД-регулятора, то есть система переводится в П-закон регулирования
Зададим пропорциональный коэффициент для W(1) 2,01666, для W(2) 0,837 и запустив Simulink, получим график, приведенный на рис. 6.

Рисунок 6. САР с П- регуляторами, в режиме незатухающих колебаний.
Анализируя полученные графики, рассчитаем коэффициенты для обоих регуляторов.
Для W(1) получаем :







Для W(2) получаем :





Подставим полученные коэффициенты в наш регулятор, и получим следующие результаты:
Метод настройки ПИД- регулятора |
Настроечные параметры ПИД-регулятора |
Передаточная функция объекта управления |
Показатели качества переходного процесса
|
|||
|
|
|
|
|
||
Циглера-Никольса |
1,21 |
0,0055 |
66,55 |
|
885 |
38,4 |
0,502 |
0,00182 |
34,668 |
|
1990 |
24 |
|



 ,
с
,
с %
%

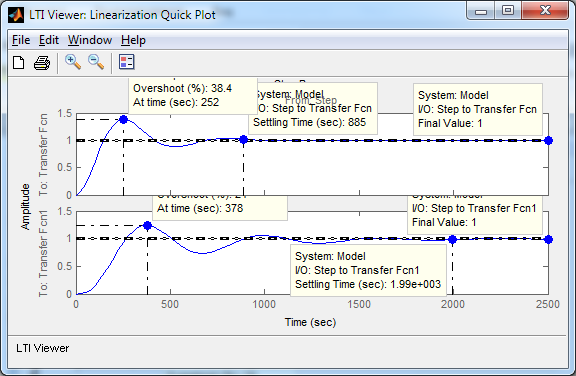
Рисунок 7. САР с расчетом коэффициентов для ПИД регуляторов по методу Циглера-Никольса.