

1.13 Показатели регулирования электропривода.
Общие положения
ЭП предназначен для сообщения движения РО различ машин и механизмов. При работе их для обеспечения рационал хода технол процесса, очень часто возникает необх регулир-я скорости движ РО. Технологич требования определяют необходимость задавать или поддерживать координаты ЭП: положение РО мех-ма, его скорость, ускорение, момент и ток Дв… В процессе управления ЭП и регулир-ия приходится принудит изменять координаты или ограничивать их. В зависимости от задач управлен ЭП изменяется и цель регулиров координат.
1 поддержание заданного уровня переменной-система стабилизации;
2 изменение перемен по заданному закону ( системы с ЧПУ);
3 ограничен перемен допустимым значением (экскаваторная хар-ка);
4 отработка произвольн сигнала изменения переменной (следящие системы).
Для регулиров скорости РО существуют 2 возможности:
1 изменен угловой скорости вала ЭП,
2 измен параметров кинематич цепи мех части привода, точнее передаточного отношения мех передач, устанавливаемых между ДВ и РО.
Рассмотрим последний вариант: Существуют 2 возмож способа управления переменной или координатой: 1 параметрический способ упр-я в разомкнутых системах; 2 автоматич способ упр-я, к.т. использ в замкнутых системах.
Параметрич системы характериз-ся изменен координаты привода за счет измен параметра Дв, применяется широко, но возможны ограничения.
Автоматич способы делятся на 2 катег: по возмущению, по отклонению. Используются либо по отклонению, либо комбинированный.
Показатели регулирования
1
диапазон регулирования хар-ет
предел изменения переменной. Сверху
диапазон ограничен макс значением
регулир величины по соображениям без
аварийной работы. Снизу ограничен
точностью регулирования.
![]()
2
точность регулирования –
определяется отклонением переменной
от заданного значения, под влиянием
возмущающих воздействий.
![]()
3
плавность регулирования
– хар-ся числом дискретных значений
регулируемого параметра, можно оценить
коэф-т плавности, где Хi
и Xi+1
– значение переменных на соседних
ступенях регулирования.
![]()
4
перерегулирование
– динамич ошибка и хар-ся максим
отклонением координаты от установиш
значения при tmax.
![]()
5 быстродействие – быстрота реакции привода на изменение воздействий. Основ показатели: время пуска и время торможения.
6
допустимая ошибка регулирования -
![]() Х – текущ
значение, Хзад –заданное. Относительная
ошибка регулир-я
Х – текущ
значение, Хзад –заданное. Относительная
ошибка регулир-я
![]()
7 допустимая нагрузка – обычно считается, что Дв работает нормально, если токи в его цепях не превышают номинальных значений.
8 экономичность – ЭП должен иметь min массу и габариты при max быстродействии.
1.14 Выбор электродвигателя при различных режимах работы.
I.
Продолжительный
режим (условное обозначение S1)
– время работы машины при практически
неизменной нагрузке и температуре
охлаждающей среды достаточное для
нагрева всех ее частей до практически
установившейся температуры. Режим
характеризуется неизменными потерями
в течение всего времени работы машины.
Пример:
вентилятор, насосы, преобразовательные
устройства, время работы которых
измеряется часами, сутками. 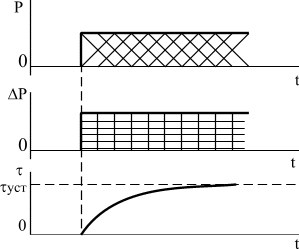 Так
как в этом случае длительность нагрузки
существенно больше постоянной нагрева,
целесообразно выбирать двигатель, для
которого этот режим является номинальным.
То есть должны выполнятся условия: Мн
≤ Мном;
Рн
≤ Рном
(
Так
как в этом случае длительность нагрузки
существенно больше постоянной нагрева,
целесообразно выбирать двигатель, для
которого этот режим является номинальным.
То есть должны выполнятся условия: Мн
≤ Мном;
Рн
≤ Рном
(![]() ).
).
К этому же режиму относят и циклическую нагрузку. В случае длительности цикла более 10 минут условия выбора определяются по ( ). При циклической нагрузке и длительности цикла, не превосходящей постоянную нагрева, условия выбора определяются по эквивалентным значениям Мэк и Рэк. Выбранный двигатель должен быть проверен по условиям пуска и перегрузочной способности. Ммax > Мн; Мmах > Мн.
II. Кратковременный режим работы (S2) – периоды неизменяемой нагрузки чередуются с периодами отключения машины, причем за время работы температура частей машины не успевает достигнуть установившегося значения, а за время пауз (отключения машины) машина охлаждается до практически холодного состояния, то есть до температуры охлаждающей (окружающей) среды (отличие составляет около 1 0С).
П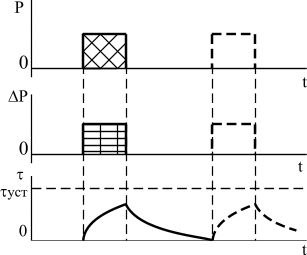 ример:
ворота, приводы разводных мостов, шлюзы
и так далее. Для электроприводов
работающих в режиме S2, нецелесообразно
выбирать двигатели, предназначенные
для работы в режиме S1, т. к. они обладают
ограниченной перегрузочной способностью,
вследствие чего недоиспользуется по
нагреву. При выборе двигателей для
режима S2, часто бывает так, что время
работы не совпадает со стандартной
продолжительностью кратковременной
работы 10, 30, 60, 90 мин. Кроме того, нагрузка
в течение периода может ступенчато
изменяться. В этих случаях рассчитываются
эквивалентные величины, которые
приводятся к стандартному значению .
Продолжение кратковременной работы
tр.ст.
ближайшему к реальному значению tр.
ример:
ворота, приводы разводных мостов, шлюзы
и так далее. Для электроприводов
работающих в режиме S2, нецелесообразно
выбирать двигатели, предназначенные
для работы в режиме S1, т. к. они обладают
ограниченной перегрузочной способностью,
вследствие чего недоиспользуется по
нагреву. При выборе двигателей для
режима S2, часто бывает так, что время
работы не совпадает со стандартной
продолжительностью кратковременной
работы 10, 30, 60, 90 мин. Кроме того, нагрузка
в течение периода может ступенчато
изменяться. В этих случаях рассчитываются
эквивалентные величины, которые
приводятся к стандартному значению .
Продолжение кратковременной работы
tр.ст.
ближайшему к реальному значению tр.
При выборе двигателя должны соблюдаться следующие условия:
 ,
,
 ,
где Мном
tр.ст, Рном
tр.ст -
номинальные значения момента и мощности
двигателя , соответствующие
продолжительности кратковременной
работы tр.ст.
В частном случае, когда нагрузка в
течение tр
не изменяется:
,
где Мном
tр.ст, Рном
tр.ст -
номинальные значения момента и мощности
двигателя , соответствующие
продолжительности кратковременной
работы tр.ст.
В частном случае, когда нагрузка в
течение tр
не изменяется:
![]() ,
,
![]() Выбранный двигатель также должен быть
проверен по условиям пуска и перегрузочной
способности.
Выбранный двигатель также должен быть
проверен по условиям пуска и перегрузочной
способности.
III. Повторно-кратковременный режим (S3) – кратковременные периоды неизменной номинальной нагрузки (рабочие периоды) чередуются с периодами отключения двигателя, причем как рабочие периоды, так и паузы не так велики, чтобы превышения температуры смогли достигнуть установившихся значений. Иными словами, этот режим отличается от кратковременного регламентированными продолжительностью включения под неизменную нагрузку и продолжительностью периода отключения (паузы), причем время работы машины всегда меньше времени, необходимого для нагрева ее частей до установившейся температуры, а время пауз меньше необходимого для остывания машины до практически холодного состояния. Продолжительность включения (ПВ) устанавливается в процентах продолжительности одного цикла работы, включающего в себя время работы и время паузы.
ПВ для S3 принята (по ГОСТу) равной 15, 20, 40 и 60% продолжительности одного цикла. В режиме S3 продолжительность цикла установлена равной 40 мин.
Работа машины и паузы периодически чередуются. ПВ в процентах определяется по формуле
![]() ,
где N – время работы; R – время паузы;
,
где N – время работы; R – время паузы;
![]() .
.
В условных обозначениях: S3 – 25% или S3 – 40%.
П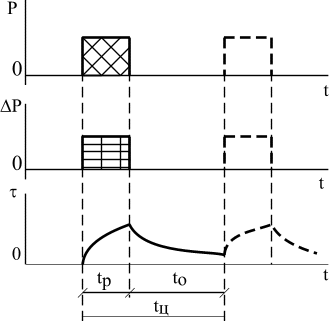 ример:
мостовой кран, лифт.
ример:
мостовой кран, лифт.
Для электроприводов, работающих в режиме S3, целесообразно выбирать двигатели, предназначенные для этого режима. Последовательность расчета в этом случае следующая:
1 По нагрузочной диаграмме для времени цикла Ту ≤ 10 мин определяются:
- относительная продолжительность включения
![]() ,
где tрi -
время работы при i-той нагрузке внутри
рабочего цикла Ту;
,
где tрi -
время работы при i-той нагрузке внутри
рабочего цикла Ту;
-
приведенные к ближайшему стандартному
значению ПВст=15,
25, 60% эквивалентные значения
 ,
,
 .
При выборе двигателя должны соблюдаться
условия: МэкПВст
≤ МномПВст
; Рэкпвст≤Рномпвст,
где Мномст,
РномПВст
– номинальные значения момента и
мощности двигателя, соответствующие
ПВст.
В ряде случаев при больших значениях
ПВ (>70÷80%) возможен выбор двигателя,
предназначенного для режима S1 , для
которого следует принять ПВ=100%. При
идентичных циклах с постоянной нагрузкой
внутри рабочего периода формулы сводятся
к следующему виду:
.
При выборе двигателя должны соблюдаться
условия: МэкПВст
≤ МномПВст
; Рэкпвст≤Рномпвст,
где Мномст,
РномПВст
– номинальные значения момента и
мощности двигателя, соответствующие
ПВст.
В ряде случаев при больших значениях
ПВ (>70÷80%) возможен выбор двигателя,
предназначенного для режима S1 , для
которого следует принять ПВ=100%. При
идентичных циклах с постоянной нагрузкой
внутри рабочего периода формулы сводятся
к следующему виду:
![]() ,
,
![]() .
.