

1.8 Тормозные режимы асинхронного двигателя.
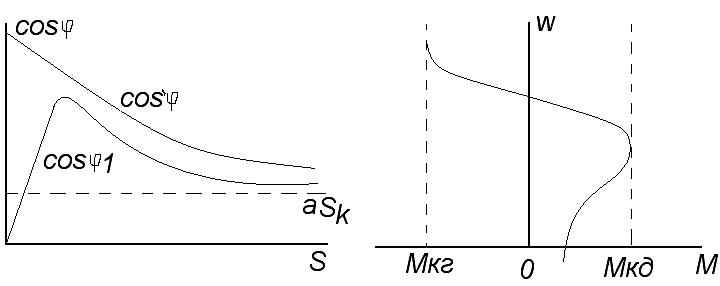
Рекуперативное тор-е с отдачей энергии в сеть возможно при скорости выше синхрононой скорости маг. Поля. По мере приближения к этой скорости момент дв-ля стремится к нулю, при дальнейшем увеличении под влиянием внешнего момента, когда ω > ω0 – дв-ль работает в режиме генератора параллельно с сетью отдавая ей Эл. Энергию. При работе АД в режиме рекуперации не следует вкл-ть в его цепи дополнительные сопротивления, т.к. это ведет к увеличению потерь и снижению КПД. Этот вид используют для подтормаживания.
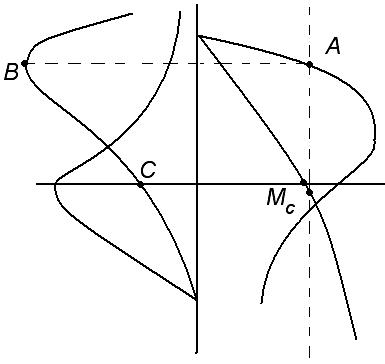
Торможение противовключением . Условия этого тор-я:
1 Ротор дв-ля под действием акт. Момента приложенного к валу должен вращаться в противоположном направлении отн-но поля статора. Тормозной ток составляет 7..8 Iном, поэтому необходимо ограничивать тормозной ток в пределах допустимой величины. Метод используется в реверсивных приводах и приводах требующих быстрой остановки.
2 при пассивном статическом моменте, кот. Не способствует вращению, осущ-ся торможение на «выбеге» - переключает чередование фаз.
С целью уменьшения тормозного тока и увеличения тормозного момента в цепь ротора вкл-ся дополнит. Сопротивления, Однако при этом способе необходимо затормозить Д или откл-ть его от сети иначе произойдет реверс.
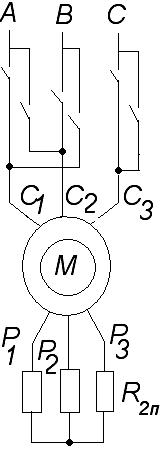
3 для осущ-я динамического тор-я АД статор откл-ся от сети переменного тока и подкл. К постоянному напр-ю. В режиме динамического торможения неподвижное маг. Поле АД обусловлено суммой намагничивающей силы ОС и ОР. Этот режим тор-я можно рассматривать как своеобразный режим работы АД:
а) ОС при вкл-ии к источнику пост.тока создает неподвижную в пространстве МДС с синусоидальным распределением вдоль воздушного зазора.
б) амплитуда этой МДС опр-ся не только постоянным током, но и схемой соединения фаз ОС.
1.9 Система управляемый преобразователь-двигатель с отрицательной обратной связью по скорости.
Основу
структурной схемы составляет разомкнутая
схема УПД. На валу ДПТ находится датчик
скорости - тахогенератор ТГ (рис. 11.23,
а), выходное напряжение которого
![]() ,
пропорциональное скорости ДПТ, является
сигналом обратной связи. Коэффициент
пропорциональности
носит название коэффициента
обратной связи
по скорости и может регулироваться за
счет изменения тока возбуждения ТГ.
,
пропорциональное скорости ДПТ, является
сигналом обратной связи. Коэффициент
пропорциональности
носит название коэффициента
обратной связи
по скорости и может регулироваться за
счет изменения тока возбуждения ТГ.
Сигнал
обратной связи
![]() сравнивается с задающим сигналом
скорости Uз.с
с и их разность Uвх=
Uз.с
- Uтг
в виде сигнала рассогласования (ошибки)
Uвх
подается на вход дополнительного
усилителя У, который с коэффициентом
ky
усиливает сигнал рассогласования Uвх
и подает его в виде сигнала управления
Uу
на вход преобразователя П.
сравнивается с задающим сигналом
скорости Uз.с
с и их разность Uвх=
Uз.с
- Uтг
в виде сигнала рассогласования (ошибки)
Uвх
подается на вход дополнительного
усилителя У, который с коэффициентом
ky
усиливает сигнал рассогласования Uвх
и подает его в виде сигнала управления
Uу
на вход преобразователя П.
U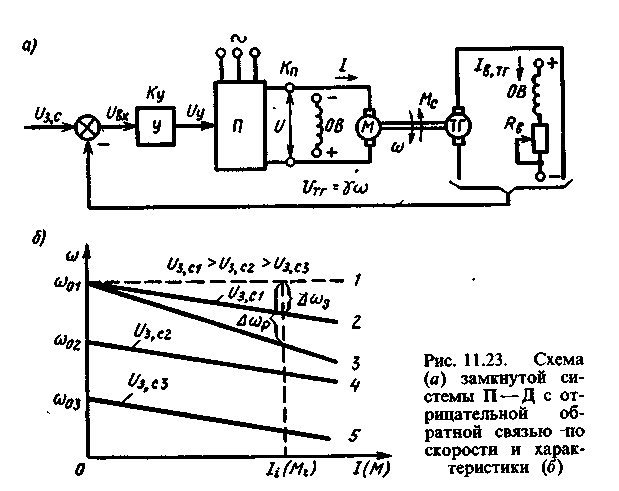 у
= Кy
Uвх
.
у
= Кy
Uвх
.
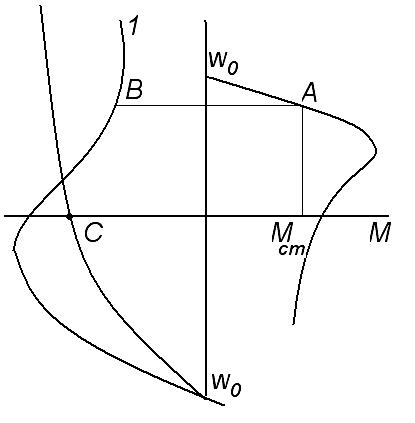
Жесткость характеристик в замкнутой системе больше жесткости характеристик в разомкнутой системе. Сами характеристики, показанные на рис. 11.23, б, , а линии 1 и 3 соответствуют замк системе. Здесь же для сравнения приведена характеристика ДПТ в разомк (параллельные линии 2, 4 и 5) системе.
Рассмотрим физическую сторону процесса регулирования скорости в данной системе. Предположим, что ДПТ работает под нагрузкой в установившемся режиме и по каким-то причинам увеличился момент нагрузки Мс. Так как развиваемый ДПТ момент стал меньше момента нагрузки, его скорость начнет снижаться и соответственно будет снижаться сигнал обратной связи по скорости. Это вызовет увеличение сигналов рассогласования и управления и приведет к повышению ЭДС преобразователя, а следовательно, напряжения и скорости ДПТ. При уменьшении момента нагрузки обратная связь действует в другом направлении.
Таким образом благодаря наличию обратной связи происходит автоматич регулирование ЭДС преобразователя и тем самым подводимого к Дв напряжения.
Для вывода мех хар-ки ДПТ в замкнутой системы, воспользуемся выражениями:
![]() (1)
(1)
 (2)
(2)
Uвх= Uз.с – γω (3)
Uу = Кy Uвх (4)
Заменяем в (1) и (2) Uу на его выраж в (4) и далее Uвх из (3):
Uу = Кy (Uз.с – γω)
![]()
![]()
Введем обозначения
С = кФП, Кс = γ Кy КП / С
![]()
![]() (1а)
(1а)
![]() (2а)
(2а)
![]()
![]()
Окончательно получается:
![]() -
ЭМХ;
-
ЭМХ;
![]() - МХ
- МХ
где
![]() ;
;
![]() - общий коэффициент усиления системы
П-Д.
- общий коэффициент усиления системы
П-Д.