1.4 Двигатель постоянного тока (типы). Двигатель постоянного тока с независимым возбуждением. Уравнения электромеханической и механической характеристик. Искусственные характеристики.
По способу включения ОВ по отношению к обмотке якоря ДПТ делятся на дв-и параллельного возбуж-я, дв-и последов-го возбуж-я и дв-и смешанного возбуждения.
Машина постоянного тока является обратимой машиной, т. е. она может работать как генератор электрической энергии, если к ее валу подводится механический вращающий момент, и как Д, если к ее обмоткам подводится эл. энергия.
Х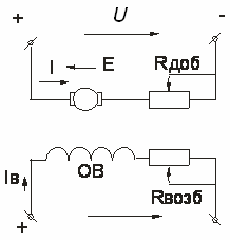 арактеристики
ДПТ с независимым возбуждением
арактеристики
ДПТ с независимым возбуждением
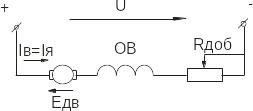
Схема включ-я ДПТ НВ.
I, IB – токи якоря и ОВ, Е – ЭДС якоря,
RB, RД – добав. резисторы в цепях возбуждения и якоря.
Условия равновесия напряжения приложенного к Дв выражается ур-ем:
![]() ЕД
= кФω , где
RЯ,
RД
– собствен и добавочн сопротив в цепи
якоря.
ЕД
= кФω , где
RЯ,
RД
– собствен и добавочн сопротив в цепи
якоря.
![]()
Зависимость скорости от тока якоря называется электро механич хар-кой ДПТ.
Для получения ур-ия мех хар-ки надо найти зависимость скорости от момента ДВ.
М=
кФIЯ
,
![]()
Мех хар-ка при неизмен параметрах (U, R, Ф) представл прямую линию, при изменении одного парам, вид меняется.
В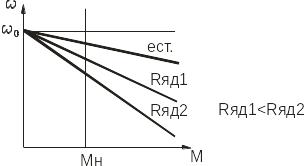 се
хар-ки при моменте =0 проходят ч/з точку,
лежащ на оси ординат, угловая скорость
в этой точке имеет определен знач и не
зависит от сопрот якорной цепи. Эта
точка носит название скорость
идеального хх
се
хар-ки при моменте =0 проходят ч/з точку,
лежащ на оси ординат, угловая скорость
в этой точке имеет определен знач и не
зависит от сопрот якорной цепи. Эта
точка носит название скорость
идеального хх
![]()
Разность
установившихся значений ЭП, до и после
приложения заданной статич нагрузки
назыв статическое
падение скорости ЭП.
![]()
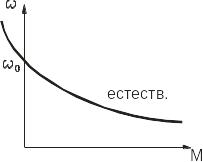
Естественной хар-ой называется такая, к.т. получается при отсутствии внеш резисторов в якорной цепи и номин знач напряж и макс потока Дв.
![]() Ур-ие
естеств хар-ки
Ур-ие
естеств хар-ки

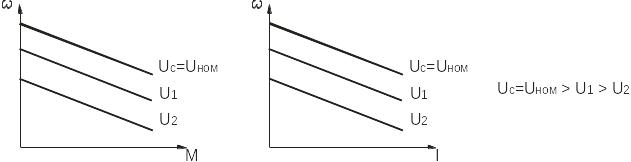
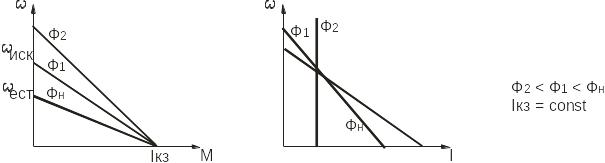
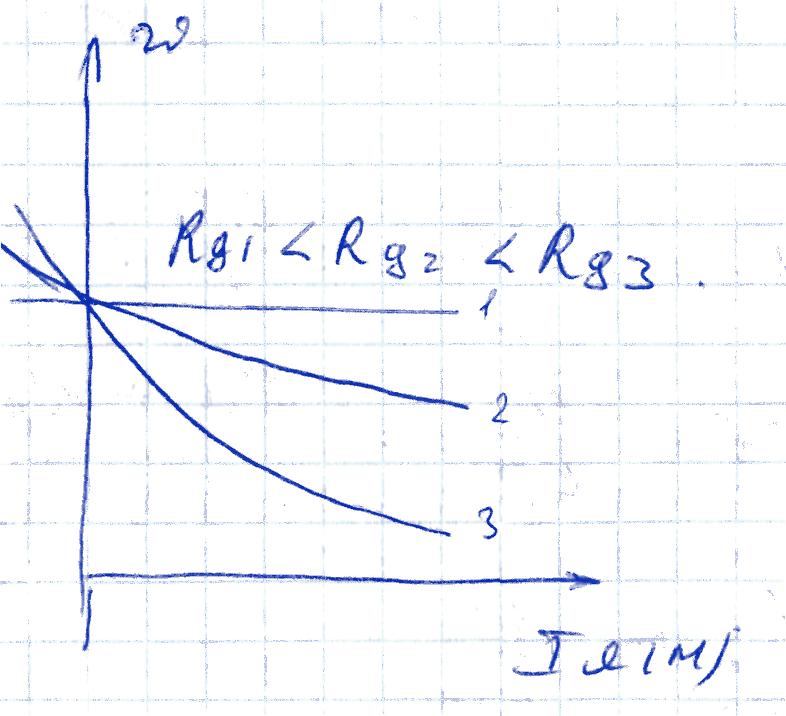
Искусственные хар-ки ДПТ НВ получаются при изменении какого-либо параметра.
1) Изменение U ω = f (I), ω = f (M),UC >U1> U2
2) Изменение R. R2>R1>Rр
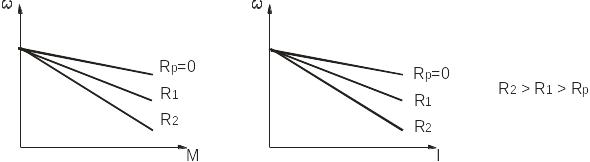
3) Изменение Ф. Ф2<Ф1<Фн
Механическая характеристика дпт с последовательным возбуждением.
![]()
 -
ЭМХ
-
ЭМХ
 -
МХ
-
МХ
О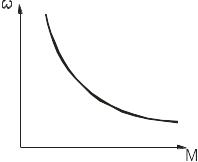 собенность
- большая крутизна в области малых
моментов. Значительное увеличение
скорости и при малых М обуславливается
уменьшением Ф. Построение реальной MX
ведется на основании каталожных данных,
где приводятся естественные
характеристики u=f(Iя),
M=ψ(Iя).
собенность
- большая крутизна в области малых
моментов. Значительное увеличение
скорости и при малых М обуславливается
уменьшением Ф. Построение реальной MX
ведется на основании каталожных данных,
где приводятся естественные
характеристики u=f(Iя),
M=ψ(Iя).
Если ω и М приводятся в относительных единицах, то такие характеристики называются универсальными, ω•=f(I•), М•=f(I•).
Искусственные хар-ки ДПТ с послед возбуждением
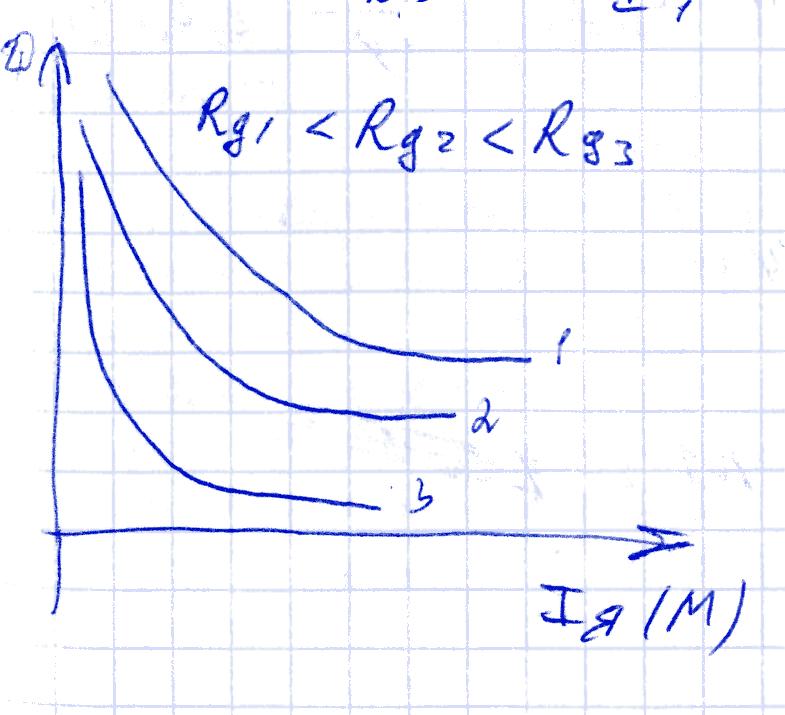
Механическая характеристика дпт со смешанным возбуждением
ДПТ
со смешанным возбуждением
имеет 2 обмотки возб, п.э мех хар-ка
занимает промежуточ положение между
ДПТ с НВ и после возб. При расчетах
мех-ой хар-ки используют естеств универсал
из каталогов. В отличии от ДПТ с посл
возб, данный Дв имеет конечное знач
скорости идеальн хх. Это знач опредил-ся
только потоком создающим ЭДС обмотки
возб 2 (ОВ2).
![]()
Искусственные хар-ки ДПТ со смешанным возбуждением
1.5 Виды тормозных режимов двигателя постоянного тока (на осях, достоинства, недостатки, применение).
Характ-ки изоб-ся на плоск-и в прямоуг-ой системе координат с осями М и w. Полож-ие точки на плос-ти, характеризуемое двумя корд-ми, определяет режим работы двиг-я.
Условием того или иного режима работы двиг-я является знак мощности P=Mω.
Из принятого полож-го направ-ия движ-ия следует, что, за исключением осей координат, любая точка квадрантов I и III, где знаки скор-и и мом-та одинаковы, соответ-ет работе, совершаемой двиг-ем (Мω)>0. Двль при этом преобразует электр-ую энергию в мех-ую.
Точки квадрантов II и IV, где знаки скор-ти и мом-та различны, относятся к потреблению двиг-м мех-ой энергии (Мω)<0. В этом случае дв-ь преобразует мех-ую энергию в электрическую.
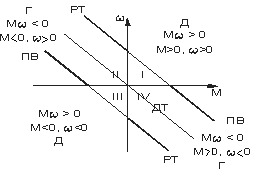
Электр-ая машина как электромех-ий преобраз-ль может работать только в одном из двух режимов; либо в двиг-ом, либо в генер-ном. В двиг-ом режиме ЭД развивает двиг-ый момент, а в генер-ом - тормозной.
Рекуперативное торм-е: примен-е – тормозной спуск в подьемно-транспортных механизмах.
Д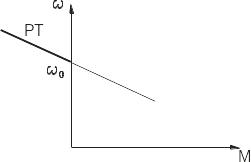 ост-ва:
1) надежность торм.;
ост-ва:
1) надежность торм.;
2) автомат-й переход из двигат-го реж. в тормозной без измен-я в схеме;
3) экономичность, возврат энергии в сеть.
Недост-ки: 1) для АД данное торм-е возможно только при совпадении частоты отдаваемого U с частотой сети; 2) не обесп-ет полной остановки;3) невозможность торм-ия при ω<ωо
Переход
в тормозной режим с отдачей энергии в
сеть будет иметь место, когда со стороны
исполнительного мех-ма на вал дв-ля
действует в дв-ом режиме момент,
совпадающий по направлению с моментом,
развиваемым двигателем.Ток потребляемый
дв-ем из сети определяется по формуле
![]() .
Под действием активного момента,
развиваемого исполнит-ым элементом и
момента дв-ля увелич скорость мех-ма.
При этом будет увел-ся ЭДС. В некий момент
времени произойдет выравнивание ЭДС и
напряжения, что будет соответствовать
режиму идеалнХХ. Дальнейшее увелич
скорости приведет к превышению Е над U
и, как следствие, к изменению направления
тока, протекающего по цепи якоря. Под
действием преобладающей ЭДС ток течет
в сеть.
.
Под действием активного момента,
развиваемого исполнит-ым элементом и
момента дв-ля увелич скорость мех-ма.
При этом будет увел-ся ЭДС. В некий момент
времени произойдет выравнивание ЭДС и
напряжения, что будет соответствовать
режиму идеалнХХ. Дальнейшее увелич
скорости приведет к превышению Е над U
и, как следствие, к изменению направления
тока, протекающего по цепи якоря. Под
действием преобладающей ЭДС ток течет
в сеть.
Для ДПТ с послед возбужд-ем рекуператив торможение не возможно. Рекуператив торм-е для ДПТ со смеш воз-м возможно при макс тормоз моментах. Рекуператив торм-е не обеспеч полной остановки, а примен для ограничения разгона.
Баланс мощности Рмех=Рэл+∆Р, где ∆Р-результатив мощ-ть потерь в силовых цепях Дв.
Режим противовкл-я: примен в реверсивных приводах, приводах требующих полной остановки.
Достоин-ва: 1) надеж-ть торм-ия при любой скорости. 2) возм-ть полной остановки; 3) высокая интенсивность торм-ия; 4) возм-ть получения обратного вращения;
5) сравнительное постоянство тормозного эффекта.
Недост-ки: 1) большое потребление энергии. 2)необход-ть прим-ия гасящих резисторов; 3) большая крутизна мех. характеристик. 4) возможность самопроизвольного реверса.
Противовкл-ем наз-ся режим, при к.т.-ом дв-ль вращается за счет запаса кинетической энергии или потенциальных сил исполнит-го мех-ма в сторону, обратную действию момента, развиваемого дв-ем. При этом момент двиг-ля, стремящегося вращаться в противоположную сторону, противодейст-ет движ-ю исполнительного механизма.
В этом случае ЭД потребляет как мех-ую энергию с вала, так и электрическую энергию из сети. Суммарная энергия расходуется в силовых цепях двигателя, т. е. ΔР=Рм+Рэ. – баланс мощностей. Торможение противовкл-ем является неэкономичным и исп-ся достаточно редко.Торможение противовкл-ем может осуществляться 2 способами:
- со стороны Дв,
Условием реализации 1 вида т-ия явл-ся изменение полярности подключения обмотки якоря или обмот возбужд, а также введение дополнит гасящего сопрот-ия. Для осуществ тормож-я необход произвести коммутацию аппаратов управ-я, теперь он работает на участке с координатами (Мторм, ωном). Гасящее сопр-е Rтпв ввод-ся для огранич велич тормоз тока и мом-та. и для уменьш жесткости тормоз хар-к. При этом обеспеч постоянство тормозн мом-та.
- со стороны рабочей машины.
П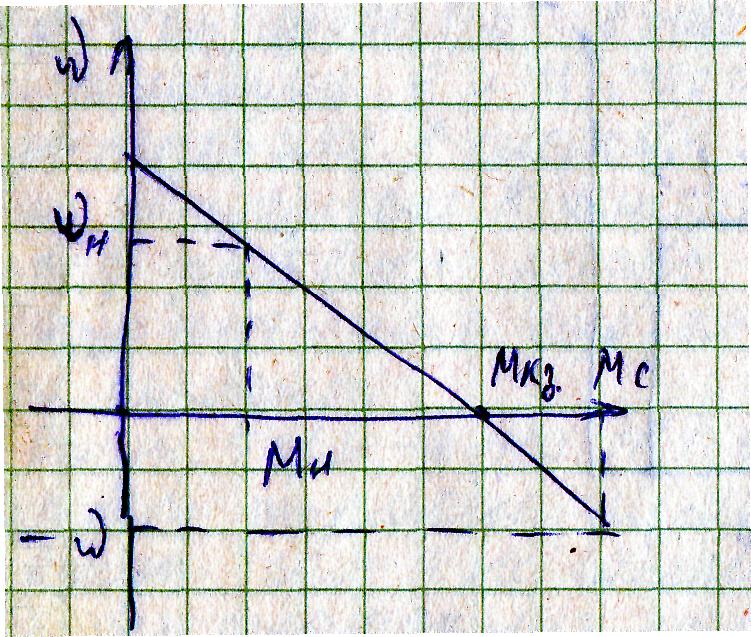 рименяется
при тормоз спуске грузов. Пусть Дв
работает на рабоч уч-ке с теми же
координатами, развивая двиг момент и
преодолевая момент сопротивл-я. Если
увелич момент сопр-я до знач КЗ Дв
остановится. При дальней увелич Мс
Дв начнет вращаться в сторону противополож
Мдв.
Чем больше увелич Мс,
тем больше скорость Дв.
рименяется
при тормоз спуске грузов. Пусть Дв
работает на рабоч уч-ке с теми же
координатами, развивая двиг момент и
преодолевая момент сопротивл-я. Если
увелич момент сопр-я до знач КЗ Дв
остановится. При дальней увелич Мс
Дв начнет вращаться в сторону противополож
Мдв.
Чем больше увелич Мс,
тем больше скорость Дв.
Необходимом помнить, что увелич Мс выше Мном-го ведет к сниж ресурса работы Дв. Что бы этого не происходило в цепь вводят R, огранич-го торм момент.
Динамическое (основной вид торможения в ЭП)
Примен-е: Для реверсивных приводов; приводов, требующих полной остановки Д.
Д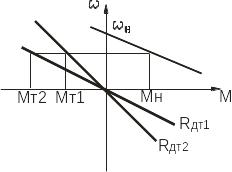 ост-ва:
1)Надежность, 2)Простота включения. 3)
Плавность торможения, 4)Экономичность.
5).Возмож-ть получ-ия характ-ик с малой
крутизной.
ост-ва:
1)Надежность, 2)Простота включения. 3)
Плавность торможения, 4)Экономичность.
5).Возмож-ть получ-ия характ-ик с малой
крутизной.
Н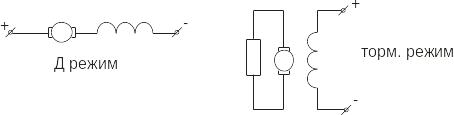 едост-ки:1)
Невозм-ть тормож-я при отсутствии питания
на ОВ в случае динам-го торм-ия с НВ; 2)
Возможность размагнич-я дв-я в случае
динам-го торм-ия с самовозбуждением.
едост-ки:1)
Невозм-ть тормож-я при отсутствии питания
на ОВ в случае динам-го торм-ия с НВ; 2)
Возможность размагнич-я дв-я в случае
динам-го торм-ия с самовозбуждением.
Режим ДТ в ДПТ осуществляется двумя способами:
1. Торможение с независимым возбуждением. 2. Торможение с самовозбуждением.
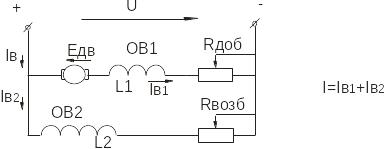
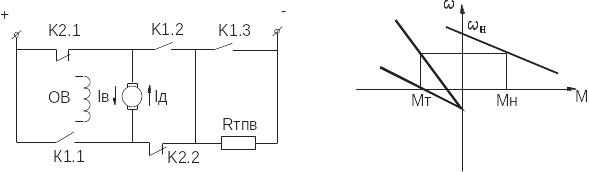
Реализация ДТ в ДПТ с ПВ.
Торм-ие с незав-ым возбуж-ем заключ-ся в том, что ОВ подключается к источнику постоянного напряжения, а обмотка якоря замыкается на сопротивление Rдт. (Uс=0)
В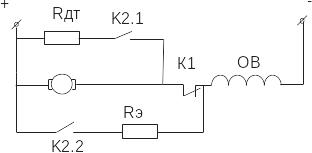 момент, когда К1 замкнут, а К2 разомкнут,
схема соответствует двиг-му режиму
работы. При изменении коммутации
(размыкается К1 и замыкается К2) якорь
ДВ-я замыкается на Rдт,
а в цепь ОВ-ия включ сопротивление Rдв,
Rдв
- сопротивление, к.т. компенсирует влияние
сопротивления якоря.
момент, когда К1 замкнут, а К2 разомкнут,
схема соответствует двиг-му режиму
работы. При изменении коммутации
(размыкается К1 и замыкается К2) якорь
ДВ-я замыкается на Rдт,
а в цепь ОВ-ия включ сопротивление Rдв,
Rдв
- сопротивление, к.т. компенсирует влияние
сопротивления якоря.
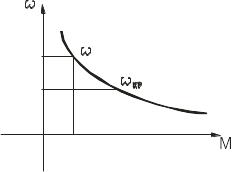
П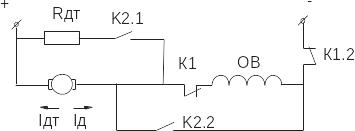 ри
динам-ом торм-ии с самовозбуж-ем якорь
замыкается на сопротивление динам-го
торм-ия, последовательно включенное с
ОВ.
ри
динам-ом торм-ии с самовозбуж-ем якорь
замыкается на сопротивление динам-го
торм-ия, последовательно включенное с
ОВ.
В режиме ДТ с самовозбуж-ем нельзя допустить измен-я направления тока в ОВ, т. к. машина в этом случае "размагничивается" Поэтому схему строят таким образом, чтобы при переключении К1 и К2 сохранилось направление тока в ОВ.
В процессе динам-го торм-ия двигатель тормозится до скорости ωкр, после которой он теряет способность работать с самовозбуж-ем и дальнейшее торм-ие происходит при остаточном потоке намагничивания и является неэффективным.