

1.1 Уравнение движения электропривода. Режимы работы в зависимости от знака Мдин
При изучении движения ЭП возникает необходимость в определениях различных механических величин: - пути и угла поворота; - скорости и ускорения; - моментов и сил, вызывающих движение и определяющих его характер.
Движение ЭП определяется действием двух моментов: - момента, развиваемого двигателем М; -момента сопротивления Мс (статического момента).
В зависимости от причин, обуславливающих возникновение момента сопротивления, различают реактивный и активный моменты сопротивления.
Реактивный момент сопротивления появляется только вследствие движения - это противодействующая реакция механического звена на движение. Реактивный момент создается силами реакции среды на движущееся тело. К ним относятся, например, моменты трения, возникающие во вращающихся элементах, моменты, действующие на рабочие органы металлорежущих станков, моменты на крыльчатке центробежных насосов, вентиляторов и т.п. Реактивный момент направлен всегда против движения, т. е. имеет знак, противоположный знаку скорости. При изменении направления вращения знак момента также изменяется на обратный. Элемент, создающий реактивный момент, может быть только потребителем энергии.
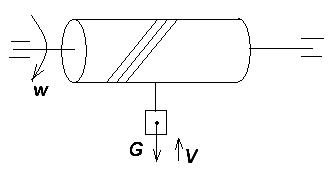
Активный момент сопротивления появляется независимо от движения ЭП и создается посторонним источником механической энергии. Это, например, момент, обусловленный весом перемещаемого по вертикали груза, момент, создаваемый силой ветра. Направление активного момента не зависит от направления вращения, т. е. знак активного момента не связан со знаком угловой скорости. При изменении направления вращения знак активного момента сохраняется. Элемент, создающий активный момент, может являться и потребителем, и источником энергии.
![]() ;
где М – момент двигателя, Мс
– момент сопротивления.
;
где М – момент двигателя, Мс
– момент сопротивления.
Знак "-" связан с тем, что за положительное направление момента сопротивления принимают направление, противоположное моменту двигателя.
Правая часть уравнения представляет собой динамический момент:
![]() где
JE
– динамический момент,
где
JE
– динамический момент,
![]() ,
,
![]()
Из ур-ия следует, что направление динамического момента совпадает с ускорением ЭП.
В зависимости от знака динамического момента различ следующие режимы работы ЭП:
1)
Мдин>
0 , т.е.
![]() >0
- разгон
ЭП при скорости ω
>0, торможение
при ω
<0.
>0
- разгон
ЭП при скорости ω
>0, торможение
при ω
<0.
2) Мдин= 0, т.е. =0 – ω=const - установившийся режим работы ЭП (Мдв=Мс)
3) Мдин <0, т.е. <0 - торможение при ω >0, разгон при ω <0.
Момент, развиваемый дв-ем не является пост-й величиной, а представляет собой ф-ю какой-либо переменной, а в некоторых случаях и нескольких переменных. Эта ф-я задается аналитически или графически. Момент сопрот-ия также является ф-ей нескольких переменных (скорости, пути, времени).
1.2 Механика электропривода. Моменты, действующие в электроприводе.
Л юбая
мех-ая часть ЭП состоит из 3 основных
звеньев с общими для разных приводов
функциями.
юбая
мех-ая часть ЭП состоит из 3 основных
звеньев с общими для разных приводов
функциями.
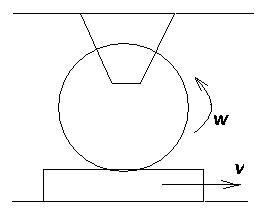
Двигатель (Д) как звено мех-кой части ЭП представляет собой источник или потребитель мех-ой эн-ии. В мех-кую часть ЭП от Д входит только ротор С (или якорь в ДПТ), кт. обладает моментом инерции Jpд, вращается с частотой ω, может развивать ДВ-ый или тормозной момент М. Передаточный преобразовательный мех-м (ПМ) осущ-ет преобраз-ие движения в мех-ой части ЭП (Н, вращательное движение преобразуется в возвратно-поступательное и наоборот). К передаточным мех-мам относятся: редукторы, зубчато-реечные передачи, кривошипно-шатунные мех-мы, барабанные мех-мы.
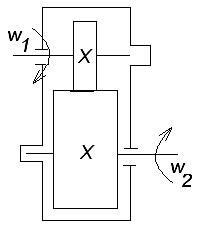
ПМ
характ-ся коэф-ом передачи
![]() ,
мех-ой инерционностью и упругостью его
элементов, зазорами в зацеплениях и
сочленениях. Рабочий
орган
(РО) реализует подведенную к нему мех-ю
энергию в полезную работу. Чаще всего
он явл-ся потребителем энергии. При этом
поток мех-ой мощ-ти направлен от ДВ к
РО-ну. РО характ-ся инерционностью,
рабочим моментом при его вращательном
движении или рабочим усилием при
поступательном движении.
,
мех-ой инерционностью и упругостью его
элементов, зазорами в зацеплениях и
сочленениях. Рабочий
орган
(РО) реализует подведенную к нему мех-ю
энергию в полезную работу. Чаще всего
он явл-ся потребителем энергии. При этом
поток мех-ой мощ-ти направлен от ДВ к
РО-ну. РО характ-ся инерционностью,
рабочим моментом при его вращательном
движении или рабочим усилием при
поступательном движении.
Примеры:
Производственная машина |
Рабочий орган |
1 Металлорежущий станок |
Шпиндель токарного станка, патрон со сверлом сверлильного станка, фреза фрезерного станка, ходовой винт механизма подачи |
2 Прокатный стан |
Рабочие валки, винт нажимного устройства |
3 Подъемный кран |
Грейфер механизма подъема, тележка мостового крана, поворотная платформа |
4 Конвейер |
Лента-цепь |
5 Стиральная машина |
Центрифуга, крыльчатка |
Передача мех-ой энергии от вала Дв к РО и обратно связана с потерями в мех-их звеньях. Причина потерь – трение в подшипниках, зацеплениях и т.д.
В
мех-их звеньях, обладающих упругостью
возникают динам-ие потери, обусловленные
вязким трением в деформируемых элементах.
В результате поток мощ-ти, проходя от
источников к потребителю, постепенно
уменьшается. Потери в данном случае
покрываются ДВ-ем – источником
энергии.Работа,
совершаемая дв-лем, (или РО, если энергия
передается от РО к ДВ) определяется
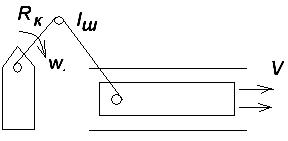
следующим образом: Вращательное
движение
Работа
![]() Мех-ая мощ-ть
Мех-ая мощ-ть
![]() Поступательное движение Работа
Поступательное движение Работа
![]() Мех-ая мощ-ть
Мех-ая мощ-ть
![]()
М – вращ. момент, Нм, F – усилие (сила), Н, V – линейная скорость, м/с, ω – угл скорость, рад/с. Задача ЭП в конечном счете состоит в выполнении заданных по технол-им требов. законов Дв РО с макс-м приближением.