

4.3 Аппаратная реализация системы
4.3.1 Обоснование выбора плк
Наиболее оптимальным методом решения поставленной задачи является создание системы на базе контроллера, поскольку контроллеры широко распространены повсеместно и на сегодняшний момент решают множество задач автоматизации. Огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров. Каждый производитель выпускает несколько типов ПЛК разной мощности и стоимости, чтобы увеличить прибыль за счет сегментирования рынка.
Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.

Рисунок 4.1 – Упрощенный принцип работы контроллера
Принцип работы ПЛК несколько отличается от «обычных» микропроцессорных устройств. Программное обеспечение универсальных контроллеров состоит из двух частей. Первая часть - это системное программное обеспечение. Проводя аналогию с компьютером можно сказать, что это операционная система, т.е. управляет работой узлов контроллера, взаимосвязи составляющих частей, внутренней диагностикой. Системное программное обеспечение ПЛК расположено в постоянной памяти центрального процессора и всегда готово к работе. По включению питания, ПЛК готов взять на себя управление системой уже через несколько миллисекунд.
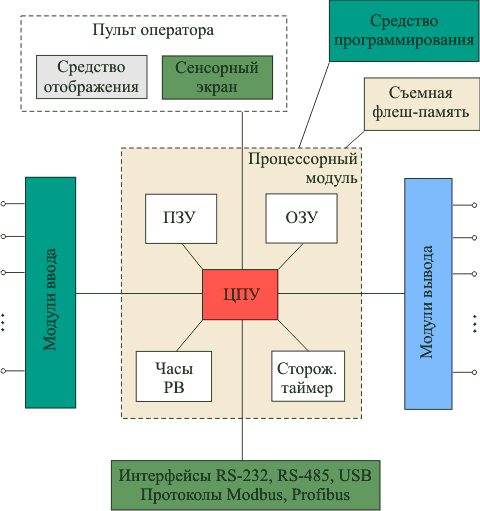
Рисунок 4.2 - Архитектура ПЛК
ПЛК работают циклически по методу периодического опроса входных данных. Рабочий цикл ПЛК включает 4 фазы:
1. Опрос входов;
2. Выполнение пользовательской программы;
3. Установку значений выходов;
4. Некоторые вспомогательные операции (диагностика, подготовка данных для отладчика, визуализации и т. д.).
Выполнение 1 фазы обеспечивается системным программным обеспечением. После чего управление передается прикладной программе, той программе, которую пользователь сам записал в память, по этой программе контроллер выполняет ряд возложенных на него задач, а по завершению управление опять передается системному уровню. За счет этого обеспечивается максимальная простота построения прикладной программы – ее создатель не должен знать, как производится управление аппаратными ресурсами. Необходимо знать с какого входа приходит сигнал и как на него реагировать на выходах.
Спектр продукции, предлагаемой сегодня, чрезвычайно широк. Для правильного выбора контроллера следует проанализировать их характеристики, сравнить результаты и определить наиболее оптимальный вариант для выполнения той или иной задачи.
Simatic S7-300 — семейство контроллеров средней производительности фирмы Siemens AG из семейства устройств автоматизации Simatic S7. В линейке контроллеров этого семейства по своей производительности занимает промежуточное положение между семействами S7-200 и S7-400. Количество поддерживаемых входов и выходов до 65536 дискретных/4096 аналоговых каналов. Конструкция контроллера модульная, модули монтируются на профильной шине (рельсе).

Рисунок 4.3 – Общий вид ПЛК Simatic S7-300
Simatic S7-300 — программируемый контроллер, предназначенный для построения систем автоматизации низкой и средней степени сложности. Основные особенности контроллера:
модульная конструкция, монтаж модулей на профильной шине (рельсе);
естественное охлаждение;
применение локального и распределенного ввода - вывода;
возможности коммуникаций по сетям MPI, Profibus Industrial Ethernet/PROFInet, AS-i, BACnet, MODBUS TCP;
поддержка на уровне операционной системы функций, обеспечивающих работу в реальном времени;
поддержка на уровне операционной системы аппаратных прерываний;
поддержка на уровне операционной системы обработки аппаратных и программных ошибок;
свободное наращивание возможностей при модернизации системы;
возможность использования распределенных структур ввода-вывода и простое включение в различные типы промышленных сетей.
Основные типы применяемых модулей:
Источники питания (PS), служащие для преобразования переменного напряжения 120/230 В или постоянного тока напряжением 24/48/60/110 В в постоянное напряжение 24 В, не обязательны, так как контроллер может запитываться от любого источника постоянного напряжения +24 В;
центральные процессоры (CPU), отличающиеся производительностью, объёмом памяти, наличием встроенных входов-выходов и специальных функций, встроенными коммуникационными интерфейсами и т.д.;
сигнальные модули (SM) для ввода и вывода дискретных и аналоговых сигналов;
коммуникационные процессоры (CP) для включения в различные типы промышленных сетей;
функциональные модули (FM), решающие отдельные типовые задачи автоматизации, позволяют разгрузить центральный процессор, или решают задачи, с которыми тот не может справиться из-за недостаточного быстродействия. Функциональные модули снабжены встроенным микропроцессором и способны выполнять возложенные на них функции даже в случае остановки центрального процессора программируемого контроллера;
интерфейсные модули (IM) позволяют объединить несколько стоек, составляющих одну станцию.
Данный тип модульного программируемого контроллера применяется для решения задач автоматизации различного уровня сложности. С его помощью можно реализовать и задачи автоматизации управления миниветроэлектростанциями, поскольку он обладает наиболее широким диапазоном рабочих температур (от -250С до +600С) по сравнению с контроллерами других производителей, выполняет возложенные на него функции при относительной влажност воздуха от 5 до 95%, что немаловажно в условиях эксплуатации ветроустановок. Гарантийный срок эксплуатации превышает сроки эксплуатации контроллеров других производителей и достигает 3 лет.