

1 Коливання систем з одним ступенем свободи
Вільні коливання систем з одним ступенем свободи
Якщо положення системи в будь-який момент часу може бути списано єдиним параметром, то система має один ступінь свободи. Прикладами таких систем є: маятник, що коливається в заданій площині (рис.1.1), маса, пов'язана з пружиною (рис. 1.2),
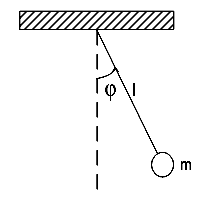
Рисунок 1.1 – Математичний маятник
Рисунок 1.2 – Пружинний маятник
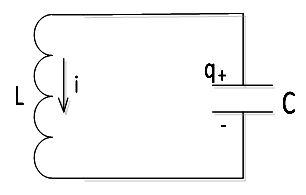
Рисунок 1.3 – Коливальний контур
або
електричний
контур (рис.1.3),
де єдиний
параметр (узагальнена координата
![]() )
:
)
:
![]() –
кут відхилення,
–
кут відхилення,
![]() -
зміщення вантажу, заряд
на пластинках
конденсатора (або
-
зміщення вантажу, заряд
на пластинках
конденсатора (або
![]() -
струм в котушці) відповідно.
-
струм в котушці) відповідно.
Для визначеності розглянемо рух маятника. Рівняння руху його запишеться у вигляді
![]() (1.1)
(1.1)
і являє собою нелінійне диференціальне рівняння.
Зазвичай нелінійні диференціальні рівняння в аналітичній формі вирішуються важко. Більше того, вони не мають властивості суперпозиції.
1.2 Лінійні коливальні системи без тертя
Скористаємося в рівнянні (1.1) розкладанням в ряд Тейлора
![]() (1.2)
(1.2)
Для достатньо
малих
![]() можемо знехтувати
в (1.2) усіма членами, за винятком
.
Після спрощення рівняння отримаємо
основне диференціальне рівняння задачі
про вільні коливання:
можемо знехтувати
в (1.2) усіма членами, за винятком
.
Після спрощення рівняння отримаємо
основне диференціальне рівняння задачі
про вільні коливання:
![]()
![]() (1.3)
(1.3)
де
![]()
Загальне рішення цього рівняння має вигляд
![]()
який і висловлює принцип суперпозиції коливань в лінійних системах.
Можна користуватися і іншою формою запису рішення:
![]() (1.4)
(1.4)
яке представляє
собою
незгасаючі гармонійні коливання. Тут
![]() –
амплітуда коливань,
–
амплітуда коливань,
![]() –
початкова фаза, які знаходяться за
початковими умовами. Кругова частота
–
початкова фаза, які знаходяться за
початковими умовами. Кругова частота
![]() пов'язана з фізичними
параметрами системи і не залежить від
початкових умов. З цієї причини її
називають власною
частотою
системи.
пов'язана з фізичними
параметрами системи і не залежить від
початкових умов. З цієї причини її
називають власною
частотою
системи.
1.3 Метод фазової площини
Опис руху системи
у вигляді залежності узагальненої
координати
![]() від часу
від часу
![]() не є єдиним. Стан
системи в будь-який момент часу
визначається двома значеннями: координати
і швидкості
не є єдиним. Стан
системи в будь-який момент часу
визначається двома значеннями: координати
і швидкості
![]() ;
воно може бути представлено у плоскій
декартовій системі координат
;
воно може бути представлено у плоскій
декартовій системі координат
![]() точкою.
Таку точку називають зображуючою
точкою, а площину
– фазовою
площиною.
точкою.
Таку точку називають зображуючою
точкою, а площину
– фазовою
площиною.
При русі системи величини і змінюються, а отже, що зображаюча точка буде змінювати своє положення на фазовій площині. Геометричне місце зображують точок для заданого руху називається фазовою траєкторією. Сукупність усіх можливих фазових траєкторій системи називають її фазовим портретом.
Звернемося до
рівняння (1.3). Враховуючи, що
![]() ,
,
![]() і
і
![]() або
або
![]() його можна переписати в фазових змінних
його можна переписати в фазових змінних
![]()
Хоча порядок рівняння знижений на одиницю, але воно стало нелінійним. В даному випадку рівняння легко інтегрується поділом змінних і рівняння фазових траєкторій має вигляд
![]() (1.5)
(1.5)
які є рівняннями
еліпсів. Постійна
![]() визначається
початковими умовами:
визначається
початковими умовами:![]() .
Початкові значення цих величин
характеризують вихідні положення
зображаючою
точки.
.
Початкові значення цих величин
характеризують вихідні положення
зображаючою
точки.
Таким чином, вся фазова площина заповнена вкладеними один в одного еліпсів з центром в початку координат (рис. 1.4).
Напрями руху зображують точок показані на рисунку стрілками: позитивна швидкість відповідає збільшенню координати, негативна - зменшенню. Взагалі, структура фазових траєкторій дає
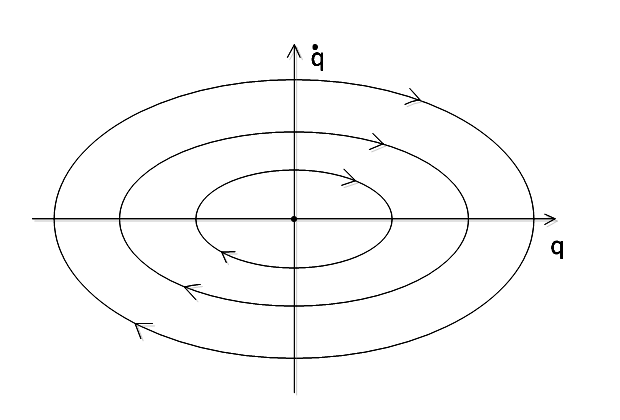
Рисунок 1.4 – Фазовий портрет лінійного осцилятора
тільки якісні особливості можливих рухів системи, але показує ряд найбільш характерних її властивостей.
У якісної теорії
диференціальних рівнянь встановлюється,
що через кожну точку фазової площини
проходить одна і лише одна фазова
траєкторія, за винятком тих точок, в
яких похідна
![]() не визначена. Так в даному випадку в
стані рівноваги (узагальнена швидкість
дорівнює нулю) маятника похідна
не визначена. Так в даному випадку в
стані рівноваги (узагальнена швидкість
дорівнює нулю) маятника похідна
![]() (1.6)
(1.6)
не визначена. Такі точки називаються особливими точками; через таку точку проходить або більше ніж одна фазова траєкторія, або не проходить жодної. На фазовому портреті (рис. 1.4) видно, що через початок координат не проходить жодна з фазових траєкторій; точки називають особливими точками типу «центр». З (1.6) також витікає, що дотична до фазової траєкторії в точках перетину траєкторії з віссю перпендикулярна цієї осі.
Якщо в рівнянні
(1.3)
![]()
![]() замінити на
замінити на
![]() ,
що відповідає випадку «негативної
жорсткості», то рівняння фазових
траєкторій прийме вигляд:
,
що відповідає випадку «негативної
жорсткості», то рівняння фазових
траєкторій прийме вигляд:
![]()
Фазові
траєкторії складаються з сімейства
гіпербол (рис. 1.5) і чотирьох півпрямі
![]() ,
є асимптотами цих гіпербол. Зображуючі
точки на будь-якій траєкторії монотонно
віддаляються від свого початкового
положення, яке характеризує обурення
стану рівноваги. Винятки становлять
зображують точки на прямій. Система
буде прагнути до стану рівноваги, але
воно виявиться нестійким: Будь-яке як
завгодно мале порушення умови призведе
до необмеженого видаленню від стану
рівноваги. Особлива точка називається
точкою сідлової або сідлом.
,
є асимптотами цих гіпербол. Зображуючі
точки на будь-якій траєкторії монотонно
віддаляються від свого початкового
положення, яке характеризує обурення
стану рівноваги. Винятки становлять
зображують точки на прямій. Система
буде прагнути до стану рівноваги, але
воно виявиться нестійким: Будь-яке як
завгодно мале порушення умови призведе
до необмеженого видаленню від стану
рівноваги. Особлива точка називається
точкою сідлової або сідлом.
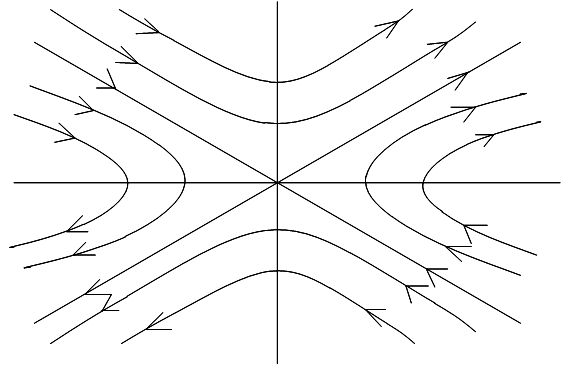
Рисунок 1.5 – Фазовий
портрет лінійного осцилятора:
![]()
Реальною механічною
системою з «негативною жорсткістю»
може служити перевернутий маятник (рис.
1.6), де наведений коефіцієнт жорсткості
![]()
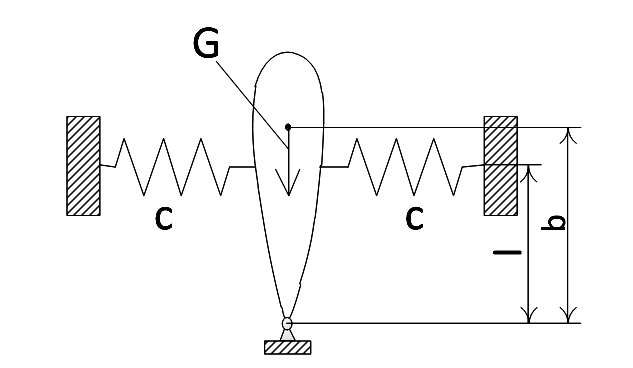
Рисунок 1.6 – Перевернутий маятник