

1.1.3. Построение механической характеристики электропривода.
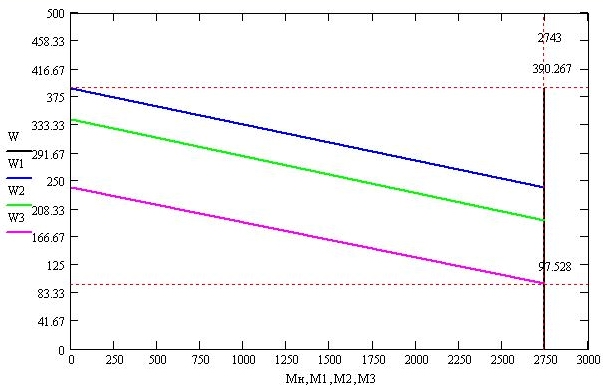
Рис.1. Механическая характеристика электропривода.
Фрагмент алгоритма построения характеристики при помощи пакета MathCad_v11.0a:
![]()
![]()


![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
2. Расчёт системы регулирования.
2.1. Расчёт параметров регулятора тока якоря (ртя).
Задаемся
 от
1 до 2 мкФ, тогда
от
1 до 2 мкФ, тогда
 Т.е. 1 мкФ.
Т.е. 1 мкФ.
![]()
Выбираем значение коэффициента интегрирования
 в зависимости
в зависимости
от заданной
величины перерегулирования
![]() (15%).
(15%).
Иначе доказательством выбора коэффициента есть определение его исходя из
обеспечения максимальной производной тока (di/dtmax), при относительном
значении динамического тока, определяемого задатчиком интенсивности
jд = 1. Т.е. Id = Iн при номинальном потоке возбуждения (см. Рис.2).
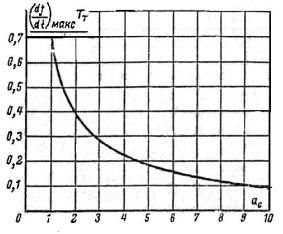
Рис. 2. Зависимость параметра регулятора Тт с учётом ограничения
производной по току при выборе коэффициента интегрирования а.
 Отсюда
Отсюда
![]()
Постоянная времени интегрирования контура тока:
![]()
где
![]() -
некомпенсированная постоянная времени
контуров тока якоря и
-
некомпенсированная постоянная времени
контуров тока якоря и
возбуждения.
4.)
Определяем
значение
![]() для
регулирования скорости управлением в
цепи
для
регулирования скорости управлением в
цепи
якоря:
![]()
Т.е. 1,094∙105 Ом.
5.) Задаемся
напряжением ограничения регулятора
![]() (для
УБСР).
(для
УБСР).
Определяем RЗ.Т.Я. :
![]()
Определяем КТ..Я.Р.Т.Я.:
![]()
2.1. Расчёт параметров регулятора э.Д.С. Для регулирования скорости вращения двигателя с обратной связью по э.Д.С. Двигателя при наличии датчика напряжения (дн).
1.) Коэффициент делителя напряжения двигателя:
![]()
где
![]() Т.е.
2кОм - сопротивление участка делителя,
с которого снимается сигнал.
Т.е.
2кОм - сопротивление участка делителя,
с которого снимается сигнал.
![]() Т.е.
3 кОм - входное сопротивление датчика
напряжения.
Т.е.
3 кОм - входное сопротивление датчика
напряжения.
![]() Т.е
18 кОм - полное сопротивление двигателя.
Т.е
18 кОм - полное сопротивление двигателя.
2.) Определяем сопротивления:
Задаемся
![]() (для
УБСР).
(для
УБСР).
![]() Т.е.90 кОм.
Т.е.90 кОм.
![]()
Аналогично для
определения коэффициента интегрирования
![]() исходя из
исходя из
обеспечения максимальной производной тока (di/dtmax), при относительном
значении динамического тока, определяемого задатчиком интенсивности
jд = 1. Т.е. Id = Iн при номинальном потоке возбуждения (см. Рис.2).
Принимаем
график вместо
![]() имея в виду, что параметр ТТ
принят как
имея в виду, что параметр ТТ
принят как
сумма
![]() .
Отсюда
.
Отсюда
![]()
И наконец:
 Отсюда
Отсюда
![]()
Определяем остальные параметры:
![]()
![]()
![]()
![]()
4.) Определяем ёмкости конденсаторов:
![]() Т.е 1мкФ.
Т.е 1мкФ.
![]() Т.е.
1нФ.
Т.е.
1нФ.