

6. Составление дифференциальных уравнений системы автоматического управления
Рассмотрим схему САУ, изображенной на рис. 21.
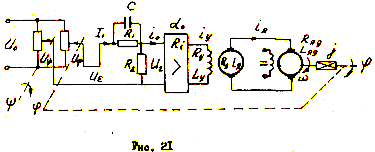
Составим дифференциальные уравнения для отдельных элементов системы.
1. Датчик рассогласования
U=m0( - )=m0 (94)
где m0 — коэффициент пропорциональности; — задание; — регулируемая величина; — рассогласование системы управления.
2. Корректирующее звено
I1=U1/R2
так как входной ток i0 усилителя практически равен нулю. С другой стороны
![]()
Тогда
![]()
После преобразований и подстановки
![]()
и
учитывая, что
![]() получим
(1p+1)U1=(1p+)U
(95)
получим
(1p+1)U1=(1p+)U
(95)
3. Усилитель, работающий на обмотку возбуждения генератора
![]()
где R1 — выходное сопротивление усилителя; 0 — коэффициент передачи усилителя; Ly, Ry — индуктивность и сопротивление обмотки возбуждения генератора.
Разделив уравнение (96) на Ry+Ri и введя обозначения
![]()
получим
(2p+1)Iy=2U1 (97)
4. Усилитель мощности — генератор, нагруженный на якорную цепь исполнительного двигателя.
Сопротивление и индуктивность якорной цепи равна соответственно,
Rя=Rяr +Rяд
Lя = Lяr +Lяд
Тогда
![]()
где Еr — напряжение на зажимах генератора; Eg — проитво ЭДС двигателя
Eg=K1pQ
Er=F(Iy)
Пусть зависимость Еr от iy имеет вид (рис. 22)
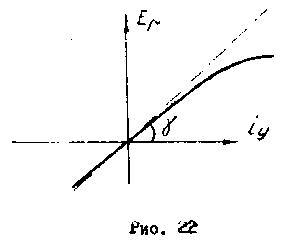
двигатель стоит, если U=0, т.е. Iy=0. Значит, рабочая точка находится вблизи нуля, начала координат.
Произведя линеаризацию [2] нелинейности, получим K2=tg
Запишем уравнение в отклонениях Er=K2iy
или для точки начала координат Er=K2Iy
Следовательно,
(Lяp+Rя)Iя=k2iy – k1pQ
Разделив на Rя и введя подстановку
![]()
получим (3p+1)Iя=3iy - 4pQ (98)
5. Исполнительный двигатель, нагруженный моментом сопротивления Мс.
Уравнение моментов имеет вид
![]()
где I — приведенный момент инерции двигателя; Mg — момент развиваемый двигателем; Mc — момент сопротивления.
Учитывая, что Mд=K3 iя
Mc=K4PQ+jMH
Получим Ip2Q+K4PQ=K3Iя - iMH
Разделим на К4 тогда (4p+1)pQ=5iя —6MH (99)
Где
![]()
6. Уравнение редуктора
=jQ (100)
В итоге получим систему дифференциальных уравнений
U=m0(—) 101-1
(1p+1)U1=(1p+1)U 101-2 (101)
(2p+1)iy=2U1 101-3
(3p+1)iя=3Iy—4pQ 101-4
(4p+1)pQ=5Iя—6MH 101-5
=jQ 101-6
Составим общее уравнение относительно интересующих нас воздействий ,
Из
уравнения системы (101-6) определим
![]()
И подставим в (101-4), (101-5)
(3p+1)iя=3Iy—4p(/j) (101-4a)
(4p+1)p(/j)=5Iя—6MH (101-5a)
Из (101-4а), (101-5а) исключаем iя
![]()
[(np+1)(3p+1)+45]p=35jiy – (3p+1)j6MH (101-4b)
Из (101-1), (101-2), (101-3) найдём Iy
Iy=[2/(2p+1)] [(1p+1)/ (1p+1)]m0 ( - )
После подстановки в (101-4б) будем иметь
{(1p+1)(2p+1)[(3p+1)(mp+1)+45]p+235jm0(1p+1)}=
=2 35jm0(1p+1) - (1p+1)(2p+1)(3p+1)j6MH
Раскрыв скобки и произведя преобразования получим
(a0p5+a1p4+a2p3+a3p2+a4p+a5)=(b0p+b1) - F(t) (102)
Где
A0=1 2 3n
A1=1 2 3 + 12 4 +13 4 +2 3 4
A2=1 2+1 3+1 4 + 23 +2 4 + 3 4+4 5 1 2
A3=1 +2 + 3 +4 +4 5 (1 +2 )
A4 = 1+4 5+m02 3 5 j1
A5=1 2 3 5 jm
B0 =2 3 5 jm0
B1= 1 23 5 jm0
Рассмотрим уравнение статики при условии, что момент нагрузки равен нулю, т.е. F(t)=0. Учитывая, что в статическом режиме все производные равны нулю, получим из (102.) a5=B1
но как видим выполняется условие
a5=B1=1 2 3 5 jm0
Следовательно = и ошибка в системе отсутствует, т.е. =0.
Если учитывать влияние нагрузки, то
= - F(t)/Q5
т.е. система не астатична по нагрузке.
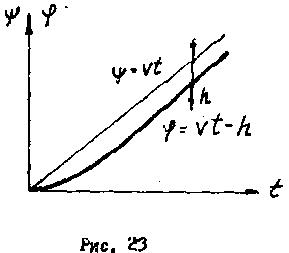
Рассмотрим режим слежения, когда задание изменяется по линейному закону, т.е.
=vt
Будем считать, что управляемая величина изменяется по закону
=t-h
Найдем скорость изменения задания и управляемой величины
![]()
Тогда, считая, что вое производные выше первой равны нулю, получим
A4+a5(t – h)=b0V+b1Vt
Приравнивая соответствующие члены, содержание время и не содержащие и учитывая, что a5=b1, получим
a5=b1v
a4 - a5h = b0v
Откуда
=v,
т.е. скорости изменения задающего
воздействия и управляемой величины
равны:
![]()
где h — ошибка слежения пропорциональна постоянной скорости задающего воздействия (рис. 23).
Отношение скорости к величине ошибки определяет добротность системы по скорости
![]()
ЛИТЕРАТУРА
1. Расчет автоматических систем. Под.ред. Фатеева А.В. Москва, Высшая школа, 1973.
2. Иващенко Н.Н. Автоматическое регулирование, Москва, Машиностроение, 1978.
3. Топчиев Ю.Н., Цыпляков А.П. Задачник по теории автоматического регулирования. Москва, Машиностроение, 1977.
4. Методические указания к лабораториям работам по дисциплине ТАУ «Принципы построения САУ». Шпит С.В. .Киев, КПИ 1979.
5. Методические указания к лабораторным работам по курсу ТАУ «Анализ линейных САУ». Каракозов Г.А., Шпит С.В., Киев, КПИ. 1979.
СОДЕРЖАНИЕ
Введение ………………………………………………...................................... Составление дифференциальных уравнений и определение
передаточных функций …………………………………………………….......
Объекты регулирования .………………………………………...................... Математические модели объектов управления..... ………………………….
. Расчет параметров и составление уравнений
двигателя постоянного тока .....…………………………………..............
1.4. Расчет параметров и составление уравнений
гидравлических серводвигателей ………………………………...............
1.5. Расчет параметров и составление уравнений
пневматических серводвигателей .......………………………………........
1.6. Расчет параметров и составление уравнений
воздушного ресивера .......................……………………………………….
1.7. Выбор модности исполнительного двигателя
система автоматического управления ........…………………………………..
1.8. Представление объектов и устройств систем
управления в виде передаточных функций ...…………………………………...
2.. Изменение параметров звеньев при помощи
обратных связей .........................………………………………………………...
2.1. Введение жестких обратных связей ...........…………………………………….
2.2. Применение неединичных, жестких обратных связей
для устранения статических ошибок……………………………………. ............
2.3. Гибкие обратные связи .............…………………………………………..........
3. Электрические корректирующие цепи .....…………………………………….....
Гибравлические и пневматические корректирующие
устройства .…………………………….........................
5. Составление уравнений статики систем автоматического управления ...............
Составление дифференциальных уравнений систем
автоматического управления .………………………………………………….......
7. литература .……………………………………………………...............................