

4. Гидравлические и пневматические корректирующие устройства
В системах автоматического управления в качестве элементов гибких обратных связей применяет гидравлические и пневматические устройства.
Простейшим гидравлическим корректирующим устройством может служить изодром, схема которого представлена на рис. 16, а его включение — на рис. 17

Перемещение тока I и поршня 3 является входной величиной Xn, а перемещение цилиндра — выходной величиной Xц. При перемещении поршня масло начинает перетекать через трубку 6 с калиброванным отверстием 7. Одновременно происходит вжатие пружины за счет разности перемещения цилиндра и поршня. Черев рычаг 5 перемещение передается выходному исполнительному устройству.
Обозначим силу сжатия пружины
Fпр = Kпр Xц (83)
где К — коэффициент жесткости пружины.
Результирующее перемещение
X = Xпр – Xц (84)
Сила трения поршня определяется зависимостью
![]() (85)
(85)
где B — коэффициент жидкостного трения.
Сила трения уравновешивается силой сжатия пружины, т.е.
Fтр = Fпр
Тогда соотношения (83), (85) запишутся в виде
![]() (86)
(86)
Определим перемещение цилиндра
![]()
Следовательно,
![]()
или![]()
Введя
обозначения![]()
получим
![]()
Данное уравнение показывает, что иэодром является интегродифференцирующим элементом (дифференцирующим входной сигнал на низких частотах и интегрирующим — на высоких частотах ).
Для схемы, показанной на рис. 16, расход масла в цилиндре изодрома будет
![]()
а
в поршне
![]()
где К — коэффициент пропорциональности; Кн — жесткость пружины изодрома; Fп — площадь поршня изодрома.
Сумма расходов масла Q2 + Q3 =Q1
а расход масла равен Q1 = l1 y — l2 xn
Уравнение серводвигателя имеет вид
![]()
где Fn — площадь поршня серводвигателя.
Из полученных выражений можно записать дифференциальное уравнение
![]()
Или. после замены

5. Составление уравнений статики систем автоматического управления
Рассмотрим установившийся режим в системе управления синхронным генератором (рис. 18).
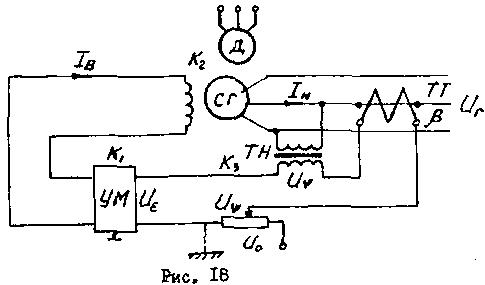
СГ — синхронный генератор; Д - двигатель; ТН - трансформатор напряжения с коэффициентом передачи Кз; ТТ - трансформатор тока с коэффициентом передачи l; УМ - усилитель мощности с коэффициентом передачи К1; U — напряжение задания; U — напряжение на выходе ТН; пропорциональное регулируемой величине, т.е. напряжение на зажимах синхронного генератора: Ur; Ux — напряжение на выходе ТТ, пропорциональное возмущающему воздействию, т.е. току нагрузки Iн синхронного генератора; U — суммарное напряжение на входе усилителя мощности, определяющее закон управления в системе; Ib — ток возбуждения генератора.
Составим уравнение статики для каждого элемента системы
Ur=k2IB - IH
U = U - U +Uf (89)
U = ksUr
IB=k1U
Uf=lIH
Решив систему относительно Ur, U, Iн получим
![]()
Обозначим
![]() =Uxx
=Uxx
![]()
Тогда Ur=Uxx - Iн (90)
Где Uxx — напряжение холостого хода генератора; — коэффициент статизма системы.
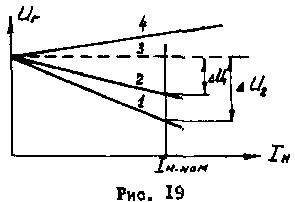
Как видно из (90) выходная величина изменяется при изменении нагрузки по линейному закону (рис. 19)
Рассмотрим несколько случаев:
1. l =0, тогда
![]()
В отсутствии системы управления уравнение генератора будет иметь вид
Ur =Uxx - Iн (91)
что соответствует кривой 1 на рис. 19. При номинальном токе нагрузки Iн ном, согласно (91) наблюдается падение напряжения на величину
Ur1=L
При включении системы управления (90)
![]()
что соответствует кривой 2 на рис. 19.
Найдем отношение
(92)
Уравнение (92) показывает, что статизм нагрузочной характеристики при наличии системы управления уменьшается в (1+к) раз.
Статизмом характеристики называют величину
![]()
Степень точности С системы определяется выражением
C=1+k
Коли задана допустимая величина изменения выходной величины, т.е. задан статизм характеристики, то из (92) можно определить величину К. Зная коэффициенты передачи объекта управления К2 и измерительных устройств К3, можно рассчитать требуемую крутизну характеристики усилителя К1.
2. l>0. Из (90) видно, что для того, чтобы напряжение Ur не зависило от тока нагрузки Iн необходимо повышать коэффициент К1 до бесконечности, что принципиально невозможно, либо применять компаундирующую связь по току нагрузки (цепь трансформатора тока).
Если выбрать l=/К1К2, то будет равно нулю и входная величина не будет зависеть от возмущающего воздействия (линия 3 на рис. 19).
При l>/K1K2 получим систему с положительным статизмом, т.е. с перекомпенсацией (линия 4 на рис. 19).
Другой путь сделать регулируемую величину независимой от возмущения, это применение астатических систем.
Преобразуем рассматриваемую систему в астатическую (рис. 20).
Составим уравнения для отдельных элементов системы:
Ur=k2IB - IH
U = U - U
U = ksUr
![]()
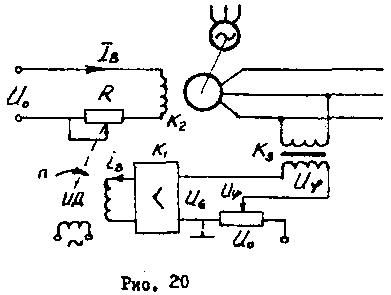
Из схемы следует, что скорость изменения тока возбуждения IB будет пропорциональна скорости вращения исполнительного двигателя ИД, т.е.
![]()
При возникновении ошибки управления U в обмотке управления двигателем ИД будет протекать ток iВ и двигатель начнет вращаться, передавая движение через редуктор на движок сопротивления R. Это повлечет за собой увеличение тока возбуждения Ib и, следовательно, Ur. Двигатель будит стоять, если U=0, а это возможно лишь при условии: U=U т.е. регулируемая величина соответствует заданию.