

2. Изменение параметров звеньев при помощи обратных связей
При разработке САУ обычно не удается выполнить систему так, чтобы она будучи составлена из основных звеньев работала устойчиво и удовлетворяла заданным при проектирования показателям качества. В большинстве случаев приходится изменять параметры некоторых основных звеньев путем введения жестких или гибких обратных связей, путем введения различных корректирующих устройств,
Существует различные методы коррекции систем. Основное значение и наиболее широкое распространение приобрели дополнительные, внутренние обратные связи. Системы управления, имеющие внутренние и главные обратные связи, называются многоконтурными.
Известно, что охват звена обратной связью приводит к изменению передаточной функции W(S). При этом эквивалентная передаточная функция принимает вид
![]()
Если в цепь обратной связи поступает сам выходной сигнал звена, т.е. Woc(S)=Koc, то такая обратная связь называется жесткой обратной связью.
Гибкой обратной связью называется связь, при которой сигнал обратной связи пропорционален производной выходного сигнала звена. Гибкие обратные связи отличаются тем, что они действуют в переходных режимах и не оказывают влияния в остановившемся состоянии.
2.1. Введение жестких обратных связей
Рассмотрим инерционное звено, охваченное жесткой обратной связью ЖОС, рис.12
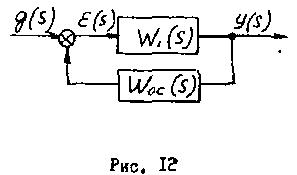

т.е. эквивалентное звено получается также инерционным, но при измененных коэффициенте усиления и постоянной времени. При отрицательной обратной связи происходит уменьшение чувствительности звена (Кэкв<К1) и увеличение быстродействия (Тэкв<T1).
При положительной обратной связи эквивалентная передаточная функция равна

где
![]()
При КосК1<1 эквивалентное звено является инерционным звеном, при этом Кэкв>К1, Тв>Т1, что приводит к уменьшению быстродействия звена, так как мерой инерционности является постоянные времени.
При КосК1>1 эквивалентное звено становится неустойчивым и является неминимально-фазовым звеном.
Cледует отметить, что не всегда удается реализовать идеальные жесткие обратные связи. Реально жесткая обратная связь может иметь постоянную времени Tс, например, если для получения жесткой обратной связи используется обмотка возбуждения электрических машин, обладающая значительной индуктивностью. В этом случае, цепь обратной связи представляется апериодическим звеном с передаточной функцией
![]()
тогда
 (80)
(80)
где
![]()
При такой обратной связи эквивалентное звено становится звеном второго порядка. При соответствующем выборе параметров (S>1) цепи обратной связи выражение (80) можно записать в виде
![]()
где
![]()
Следовательно, для реализация ЖОС требуется выбирать устройства с малыми Тс, так как с увеличением Тс влияние отрицательной обратной связи будет уменьшаться ввиду того, что Тс входит в числитель и компенсирует влияние слагаемого входящего в знаменатель.
Особенно эффективно применение жестких обратных связей для стабилизации нейтральных объектов управления.
Рассмотрим интегрирующее звено с передаточной функцией
![]()
охваченное ЖОС Woc(S)=Koc
При этом

или
![]()
где
![]()
Таким образом, интегрирующее звено, охваченное жесткой обратной связью, превращается в инерционное звено с положительным самовыравниванием.
Если ЖОС не идеальная, т.е.
![]()
то

где
![]()
Для
получения не колебательных переходных
процессов необходимо, чтобы выполнялось
соотношение
![]()
2.2 Применение неединичных жестких обратных связей для устранения статических ошибок
Пусть
![]()
В этом случае
![]() (81)
(81)
Для того чтобы сигнал y(t) воспроизводился без ошибки. необходимо обеспечить условие Wз(S)=1. При этом должно выполняться условие
1+Woc(S)W(S) – W(S)=0
Откуда
Woc(S)W(S)=W(S) – 1
![]()
Так как порядок полинома А(S) больше порядка полинома B(S), то после разложения в степенной ряд получим
Woc(S)=koc – (Toc1S+Toc2S2+…)
Пусть
![]()
Тогда
![]()
Условию отсутствия статической ошибки соответствует равенство свободных членов числителя и знаменателя в выражении (81), т.е. из условия Wз(0)=1 имеем
K1=1+mK1
Следовательно

Откуда
эквивалентная передаточная функция
разомкнутого эквивалентного звена
принимает вид

что эквивалентно астатизму первого порядка.