

Методические указания по выполнению практических занятий по курсу «теория автоматического управления (линейные cap)»
ВВЕДЕНИЕ
.Современная промышленность и сельское хозяйство характеризуется непрерывным увеличением производительности машин и агрегатов, повышением качества выпускаемой продукции. Для управления различными процессами во всех областях техники применяется системы автоматического управления.
Система автоматического управления - замкнутая динамическая система направленного действия, обеспечивающая определенную функциональную связь между регулируемыми и задающими воздействиями посредством управлявших воздействий, между управляющей и управляемой подсистемой, между регулятором и объектом управления.
Эта функциональная связь может быть получена в виде алгебраических, дифференциальных и интегральных уравнений, которые образуют математическую модель физической системы или отдельного ее элемента.
Перед разработкой математических моделей физических процессов необходимо четко сформулировать цель и задачи управления, так как модели одного и того же физического процесса могут иметь мало общего, если они разрабатывались для разных целей.
Для разработки моделей физических процессов необходимо определить:
• область действия или границы изучаемого процесса;
• глубину детализации;
• физические ограничения на переменные состояния;
характер управления: управление в установившемся режиме и управление динамическое;
требуемую точность;
• величины переменных состояния, известные переменные управления;
• оценить возмущающие воздействия и другие неуправляемые переменные.
Часто для простоты описания вводятся различные упрощающие предположения, видное место могут занимать интуиция и здравый смысл. Интуиция играет важную роль при формировании основных допущений в установлении основных зависимостей между ключевыми переменными, а также при выработке первоначального подхода к построению модели физического процесса. Здравый смысл требуется для обеспечения равновесия между точностью и полнотой описания модели, с одной стороны, и сложность» управления, о другой».
Базой для разработки модели физического процесса являются основные законы физики и химии, действующих в пневматических, гидравлических, тепловых, механических, электрических и ядерных системах,
Однако для трактовки основных законов можно применить единый подход, который позволяет исследователи переходить от одной области к другой, например, от гидравлики к электротехнике; от теплотехники к механике и т.д.
Для этой же цели вводятся понятия и определения из области теории систем: элемент, соединение, система, обратная связь.
Элемент - это физический предмет, устройство, характеристики которого можно определить на основе измерений в двух точках пространства, b теории автоматического управления научаются, как правило, однонаправленные элементы, преобразующие входные переменные в выходные.
Соединение - это точка, к которой присоединены один или более элементов. Это некоторые абстрактные точки, в которых не происходит никакого накопления, передачи, преобразования или рассеивания энергии.
Система - это совокупность элементов, в которой алгебраическая сумма' энергии равна нулю, т.е. создаваемая системой энергия равна преобразуемой или рассеиваемой.
Важную роль в теории систем имеет проблема обратной связи, которую можно сформулировать следующим образом:
1.
Существует некоторая цель (задача
) или, в
более общем случае, совокупность задач.
Предполагается, что эти задачи допускают
математическую формулировку с помощью
некоторых переменных
![]() X1,X2…Xn
,
совокупность которых обозначена через
R.
.
X1,X2…Xn
,
совокупность которых обозначена через
R.
.
2. Для выполнения этих задач необходима определенная физическая реализация, т.е. аппаратура. Эта аппаратура образует управляемый объект со входами U1, U2, Um, совокупность которых обозначена через М. Очевидно, непосредственное решение проблемы состоит в том, чтобы поместить между R.и М устройство, которое переводило бы поставленные задачи на язык сигналов, соответствующих характеру объекта.
3. Применение управляющего устройства УУ могло бы решить проблему, если бы не было некоторых препятствий, возникающих весьма часто и заключавшихся в неполном знании свойств объекта и неконтролируемых воздействий приложенных к объекту управления. Эти виды препятствий объединяются одним понятием «незнание». Если бы характеристики изменений во времени возмущающих воздействий 1 2 … r параметров объекта a1 a2 … ak были бы известны, их влияние можно было бы скомпенсировать правильным выбором управляющих воздействий.
Поскольку же мы не знаем полностью, каковы изменения параметров и возмущающих воздействий, цель оказывается недостижимой.
4. Проблема также состоит в том, чтобы с заданной точностью выполнить поставленные задачи при помощи заданного управляемого объекта, несмотря на неполноту сведений о системе.
Заданная точность может выражаться допустимой погрешностью , а «незнание» может быть таким, что даже в спроектируемой наилучшим образом разомкнутой системе максимальная результирующая погрешность будет равна m, где m>1. Для достижения поставленной цели необходимо выработать дополнительные управления U1 U2 … Um которые вырабатываются на основе сопоставления заданных и фактических значений управляемых величин. Эти сопоставления происходят в сравнивающих элементах, которые выполняют сравнение выходных величин с заданными:
= g - KX
где К - коэффициент преобразования переменных состояния к физическим единицам измерения воздействия.
Тогда дополнительные управления U являются функциями U(,t) и вместе с основными управлениями формируют закон управления системой ( Рис. 1 ) [4] :
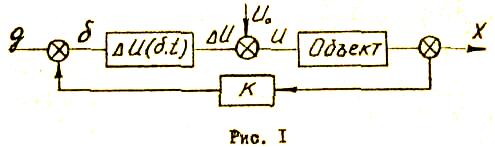
Проектирование систем автоматического управления целесообразно начинать с составления функциональной структурной схемы и затем ухе переходят к выбору и расчету параметров отдельных элементов, При выборе элементов необходимо исходить из требований, предъявляемых к системе, учитывая при этом ее назначение, надежность, экономичность, вид источника питания, внешние условия работы. Выбранные элементы должны быть согласованы по входным и выходным характеристикам.
Подавляющее большинство реальных элементов имеет нелинейные характеристики и поэтому, для таких элементов их математические модели будут описываться нелинейными уравнениями. Однако значительная часть нелинейных уравнений может быть подвергнута операции линеаризации относительно рабочей точки А1. Такая линеаризация приводит к уравнениям в отклонения вида
X = K^gc
где
K^
- коэффициент линеаризации K^
=
![]() g=A
g=A
Такая линеаризация приводит к линейным уравнениям и, в конечном итоге, к линейным математическим моделям, для которых математический аппарат анализа разработан наиболее полно.
Математическую модель, образ элемента мы будем называть звеном. В результате анализа таких моделей могут быть получены различные динамические характеристики, зависящие от времени и параметров системы [4].
Применяя преобразование Лапласа к линейным, дифференциальным уравнения при нулевых начальных условиях, получим передаточные функции звеньев и систем автоматического управления.