

5.9.2. Достоверность входных данных и аварийная сигнализация
Существует много методов проверки достоверности исходных данных, так как ошибки во входных данных могут привести к некорректным управляющим действиям. В первую очередь, необходимо убедиться, что величина входного сигнала лежит в пределах рабочего диапазона датчика. При этом обычно определяют полосу гистерезиса вокруг порогового значения (рис. 5.15.).
Проверка скорости изменения сигнала позволяет обнаружить ошибки датчик; Если изменения выходного сигнала датчика в течение нескольких последних интервалов выборки превышают заранее определенное значение, то вырабатывается аварийный сигнал. Контроль скорости изменения должен проводиться перед цифровой фильтрацией.
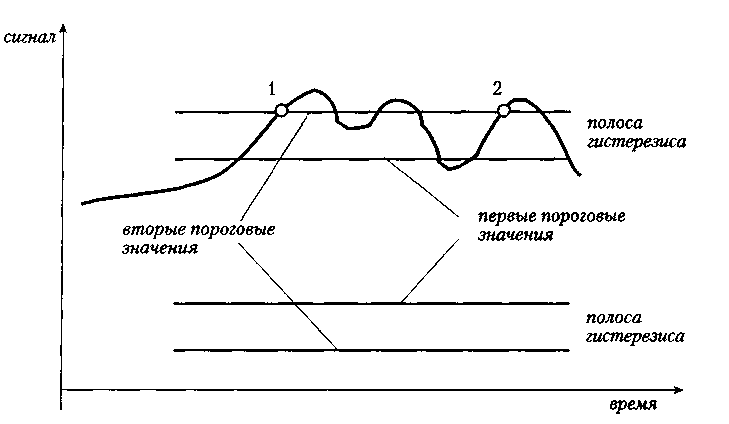
Рис. 5.15. Полоса гистерезиса около пороговых значений
-Аварийная индикация устанавливается, когда значение сигнала достигает точки 1, и удерживается до тех пор, пока оно не станет меньше нижней границы полосы гистерезиса; новый аварийный сигнал будет выработан в точке 2
5.9.3. Масштабирование и линеаризация
Собранные значения входного измерительного сигнала во избежание недоразумений и ошибок должны быть пересчитаны в соответствующие инженерные единицы измерения. Преобразование от внутреннего представления у к инженерным единицам z обычно можно произвести с помощью простой линейной зависимости
z = k1+ k2
где k1+ k2 константы.
5.9.4. Другие операции обработки данных
Усреднение
Влияние ошибок измерений можно уменьшить с помощью простого усреднен Например, АЦП может быть запрограммирован для выборки сигнала в 10 раз быстрее, чем необходимо, и тогда грубое значение можно получить как среднее за 10 интервалов выборки. Дополнительно можно отбросить одно-два значения, не укладывающихся в общую тенденцию изменения данных за период усреднения, •
Калибровка и компенсация дрейфа
Значения входного измерительного сигнала часто нуждаются в компенсации дрейфа или погрешностей калибровки датчиков или электронных устройств. Для этой цели входные усилители и АЦП должны тестироваться и, при необходимости проходить калибровку с помощью известного и точного эталона напряжения.
5.9.5. Программное обеспечение для анализа данных
Программ для анализа и фильтрации данных очень много. Одними из наиболее широко используемых в академической и научной среде пакетов является MATLAB. MATLAB — это инженерный пакет для обработки и визуального преставления, который объединяет в общую среду процедуры численного анализа, матричных вычислений, обработки сигналов и графического представления данных
5.9.6. Структура данных для обработки измерений
Каждый входной измеренный сигнал связан с определенным набором параметров; которые используются программами ввода и обработки данных. Наиболее важные параметры, используемые в обработке измерений:
- указатели на данные измерений;
- адрес входного порта измеренной информации;
- интервал выборки;
- коэффициенты пересчета сигнала (масштабы);
- параметры датчика;
- пороговые значения для физического процесса (полоса гистерезиса с первым и вторым сигнальными пределами);
- допустимая скорость изменения;
- параметры фильтра;
- результат измерений до и после обработки;
- логические переменные, управляющие подключением тех или иных процедур, например, линеаризации, пересчета входных данных, фильтрации, обработка нештатных ситуаций.