

2.4. Цифровые тахометры
Принцип действия цифровых тахометров основан на подсчете количества импульсов напряжения (которые формируются на выходе первичного преобразователя тахометра) за фиксированный интервал времени.
На рисунке 2 представлена структурная схема цифрового тахометра.
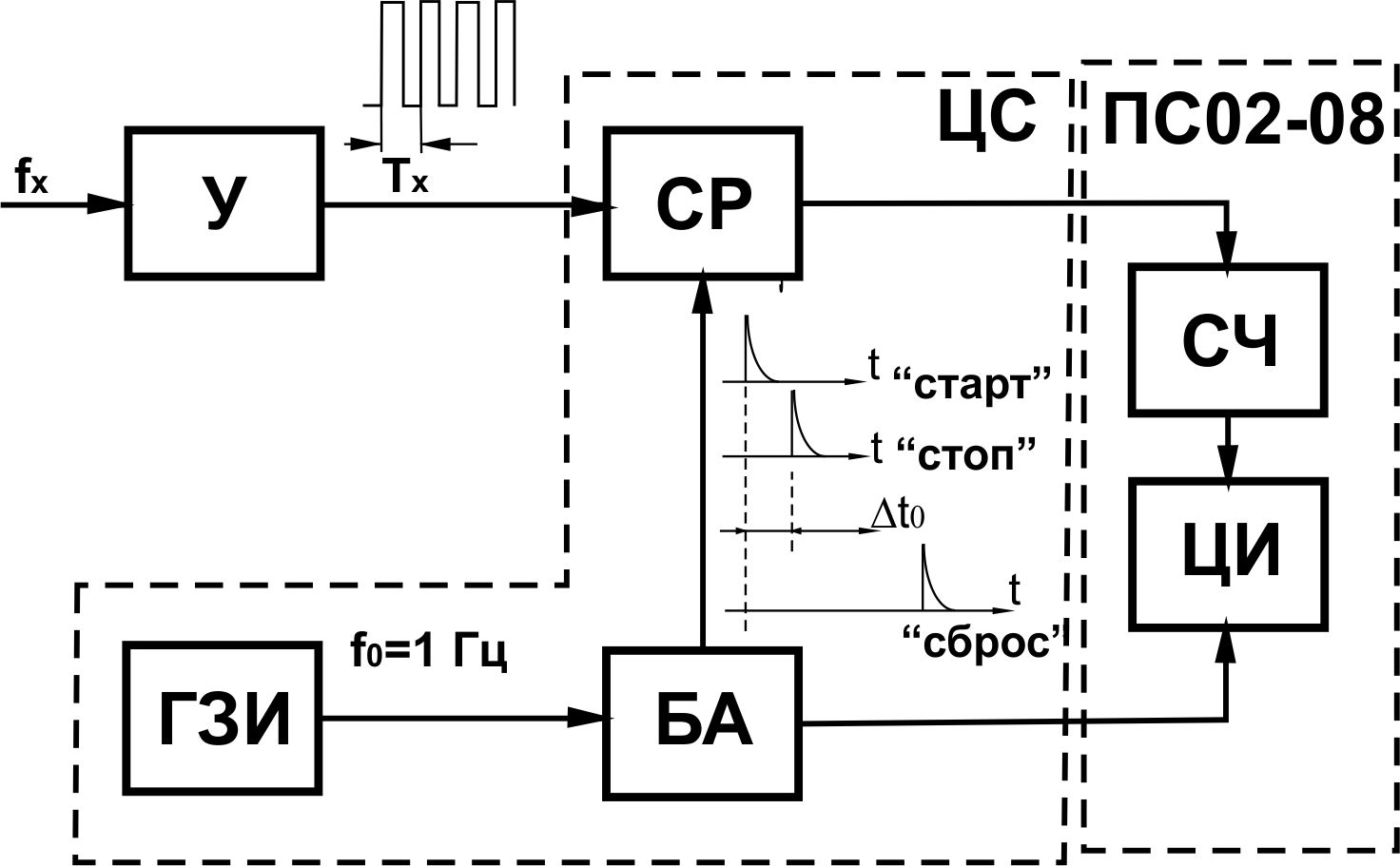
Рисунок 2 - Структурная схема цифрового тахометра
Импульсы тока, которые поступают с выхода первичного преобразователя (например, фотоэлектрического), формируют на сопротивлении R1 (рисунок 4) импульсы напряжения uH(t), частота следования которых fХ пропорциональна частоте вращения вала двигателя. Импульсы uH(t) усиливаются усилителем напряжения (У) и через схему разрешения (СР) поступают на счетный вход счетчика (СЧ).
Блок автоматики (БА) формирует импульс определенной длительности t0. Интервал t0 формируется путем пересчета в БА импульсов образцовой частоты f0 = 1 Гц, вырабатываемых генератором задающих импульсов (БА формирует два коротких импульса («старт» и «стоп»), которые следуют друг за другом с интервалом времени t0. С приходом импульса «старт» на управляющий вход схемы разрешения (СР) начинается счет импульсов, поступающих на счетный вход СЧ счетчика импульсов, а с приходом импульса «стоп» счет импульсов прекращается. Число импульсов N, зафиксированное счетчиком и отображаемое цифровым индикатором (ЦИ), равно:
![]() , (5)
, (5)
где n - частота вращения вала двигателя в 1/мин;
k - число отверстий в диске;
t0 - время счета в секундах.
Из
соотношения (5) следует, что если обеспечить
выполнение условия
![]() ,
то показания ЦИ будут численно равны
частоте вращения вала n.
,
то показания ЦИ будут численно равны
частоте вращения вала n.
2.5. Стробоскопические тахометры
Стробоскопический метод основан на способности глаза удерживать в течение некоторого времени зрительное впечатление от предмета, скрывшегося из поля зрения. В наиболее распространенных строботахометрах вал периодически освещается безынерционным источником света (строботроном). При частоте вспышек, синхронной с частотой вращения вала, последний будет казаться неподвижным. Обычно для управления вспышками строботрона используется генератор с регулируемой частотой, а шкала частот генератора градуируется в единицах измерения частоты вращения. Уравнение строботахометра имеет следующий вид:
![]() , (6)
, (6)
где m =1,2,...- коэффициент кратности;
n - частота вращения вала в 1/мин;
F - частота следования световых импульсов в Гц.
Погрешность измерений строботахометром зависит от стабильности частоты генератора. Недостатком этих приборов является трудность построения измерителей малых частот вращения. Для исключения ложных отсчетов, измерение всегда следует начинать с наибольшей частоты следования световых импульсов. Правильному отсчету соответствует наибольшая частота, при которой наблюдается одно неподвижное изображение (m = 1).
2.6. Дистанционные магнитоэлектрические тахометры.
На рисунке 3 приведена структурная схема дистанционного магнитоэлектрического тахометра ИСТ-2, используемого в лабораторной установке.
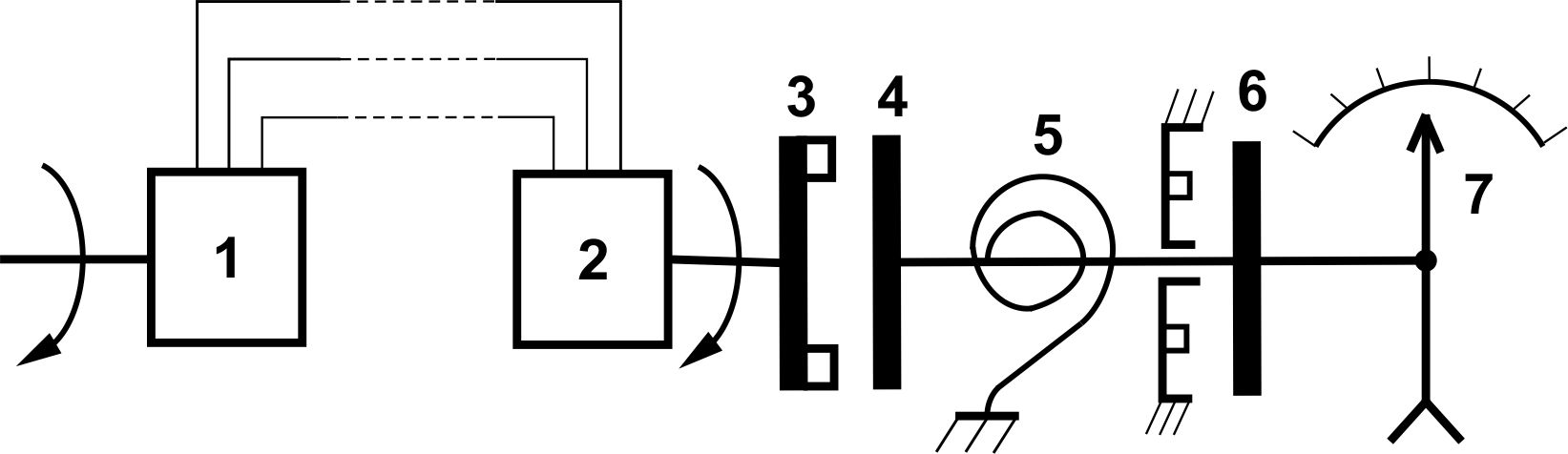
Рисунок 3 - Структурная схема дистанционного
магнитоиндукционного тахометра
Дистанционное измерение частоты вращения основано на принципе дистанционной электрической передачи вращения вала двигателя к валу магнитоиндукционного измерительного узла и преобразования частоты вращения в угловое перемещение стрелки прибора.
Ток тахогенератора 1 через линию передачи подводится к обмотке статора синхронного электродвигателя 2. Ротор электродвигателя состоит из двух постоянных магнитов и трех гистерезисных дисков, соединенных вместе, и вращается синхронно с магнитным полем, создаваемым статором, то есть частота вращения ротора пропорциональна частоте вращения вала тахогенератора 1. На конце ротора укреплен магнитный узел 3, имеющий несколько пар полюсов постоянных магнитов, между которыми расположен чувствительный элемент 4. При вращении магнитного узла 3 в чувствительном элементе 4 возникают вихревые токи, которые при взаимодействии с магнитным полем узла 3 создают вращающий момент МВр чувствительного элемента, пропорциональный частоте вращения магнитного узла. Вращающемуся моменту противодействует момент МПр спиральной пружины 5:
МПр = Wуд·,
где Wуд - удельный противодействующий момент, зависящий от упругих свойств материала и геометрических размеров пружины;
- угол закручивания пружины.
При равенстве МВр = МПр система находится в равновесии и указатель 7 отклоняется на угол, пропорциональный частоте вращения вала тахогенератора.
Для создания момента успокоения, повышающего устойчивость показаний стрелки, используется магнитоиндукционный успокоитель 6.