Пример на закрепление Графический метод решения задач линейного программирования
Графическим методом можно решать, в основном, задачи линейного программирования, имеющие две переменные.
Решим графическим методом задачу линейного программирования с двумя переменными, изложенную и рассмотренную выше.
Начнём решение задачи с построения области её допустимых решений (рисунок 1). В первую очередь отобразим в прямоугольной системе координат условия неотрицательности переменных (3). В двумерном пространстве уравнению соответствует прямая, а неравенству - полуплоскость, лежащая по одну сторону от прямой. Построим прямые х1=0, и х2=0, которые лежат на границах полуплоскостей и совпадают с осями координат. Полуплоскости х1>0, х2>0 лежат соответственно справа от оси Ох2 и выше оси Ох1. Множество точек, удовлетворяющих одновременно неравенствам х10 и х20, представляет собой пересечение построенных полуплоскостей вместе с граничными прямыми и совпадает с точками первой четверти.
Рассмотрим ограничения задачи ,построим по порядку прямые:
6х1+6х2=36
4х1+2х2=20
4х1+8х2=40
и определим, с какой стороны от этих прямых лежат полуплоскости, точки которых удовлетворяют соответственно строгим неравенствам:
6х1+6х2≤36
4х1+2х2≤20
4х1+8х2≤40
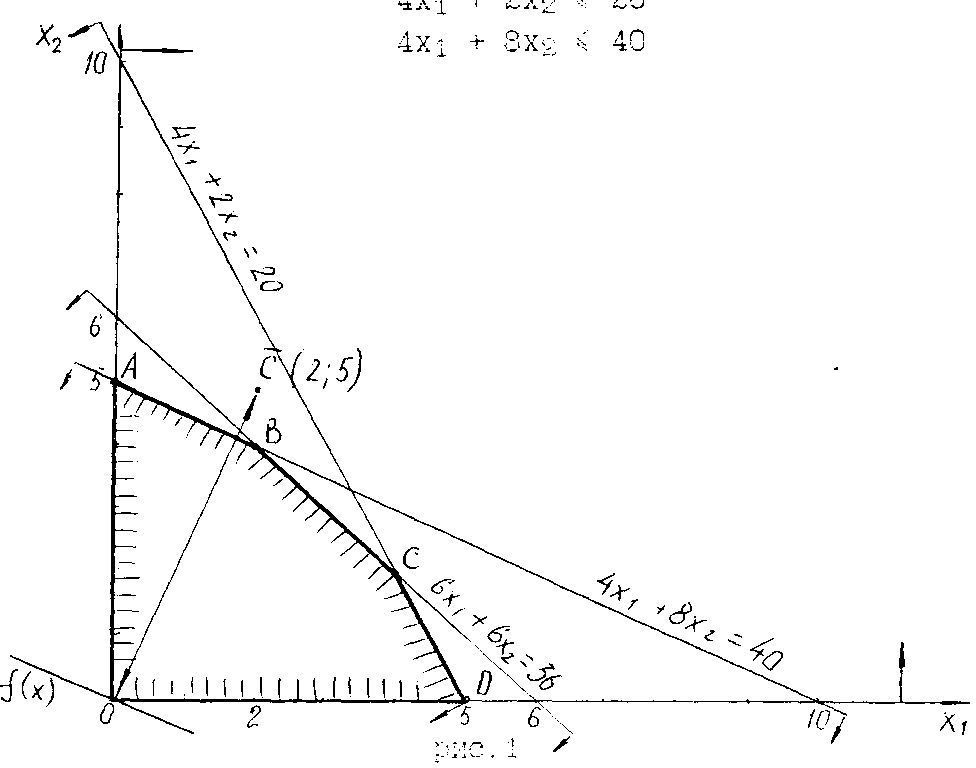
Рисунок 1
Сторона, в которой располагается полуплоскость от прямой, указывается стрелками. Существует следующий способ определения полуплоскости: если коэффициент при х2 в ограничении положительный, то неравенству «>» соответствует полуплоскость, лежащая выше граничной прямой, а неравенству «<» - полуплоскость, лежащая ниже граничной прямой. Если коэффициент при х2 в ограничении отрицательный, то наоборот.
Область определения задачи (1)-(3) будет представлять собой пересечение всех построенных полуплоскостей. В данном случае это многоугольник ABCDO, каждая точка которого, включая и точки, лежащие на его границах, будет удовлетворять ограничениям (2) – (3).
Следующим этапом присвоим функции f значение нуль и построим прямую
2х1+5х2=0 (9)
Эта прямая проходит через начало координат. В левой части уравнения (4) стоит скалярное произведение двух векторов
![]() =
(С1;С2)
= (2;5) и
=
(С1;С2)
= (2;5) и
![]() =
(х1;х2)
(10).
=
(х1;х2)
(10).
Если скалярное произведение векторов равно нулю, то векторы перпендикулярны.
Построим вектор [он проходит через начало координат и точку (2;5)] и перпендикулярно ему через начало координат проведём прямую (4).
Вектор всегда показывает направление возрастания значения целевой функции, а противоположный ему вектор (- ) – направление убывания значения целевой функции. Передвигая прямую (4) по области определения параллельно самой себе в направлении вектора , значение целевой функции будет возрастать, и наоборот, передвижение в направлении вектора (- ) даёт убывание значения целевой функции.
Как видно из рис1, целевая функция f в задаче (1)-(3) достигает своего максимального значения в точке А многоугольника, а минимального – в точке 0.
Оптимальному решению задачи (1) – (3) соответствует точка А, которая лежит на пересечении прямых
X2=0 (11)
4х1+8х2=40
Для определения координат точки А решим систему (7). В результате получим: х1=0, х2=5, fmax=2*0+5*5=25.