14. Циліндричний і сферичний шарнір. Креслення,реакції.
Циліндричний шарнір допускає поворот щодо осі шарніра і переміщення вздовж осі, але перешкоджає переміщенню, перпендикулярному до осі шарніра. Підп'ятник перешкоджає переміщенню, перпендикулярному до осі шарніра і, крім того не дає тілу переміщатися уздовж осі.

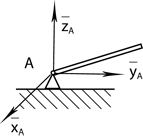
Сферичний
шарнір.Цей зв'язок допускає поворот
відносно точки закріплення, але
перешкоджає переміщенню в будь-якому
напрямку. По суті це нерухомий шарнір,
але в умовах тривимірної
15.Особливості в'язі «підп'ятник» Креслення,реакції.
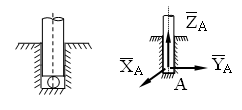
Підп'ятник - зв'язок, що є комбінацією циліндричного шарніра і опорною площині. Зустрічається в задачах на ППСС. Іншою опорою тіла, яке має такий зв'язок, є, як правило, циліндричний шарнір.
Невідома по величині і напряму реакція підп'ятника, як і у сферичного шарніра, визначається за її складовим, спрямованим вздовж трьох координатних осей.
На малюнку наведено умовне зображення підп'ятника і один з варіантів його конструктивного виконання.
16. Ідеальні в'язі та їх властивості. Приклади.
Зв'язки
називаються ідеальними, якщо робота
всіх сил включно із силами інерції на
віртульних переміщеннях дорівнює нулю.
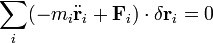
Наприклад, Принцип д'Аламбера-Лагранжа.Який
стверджує, що стверджує, що для того,
щоб рівняння руху матеріальних точок
у механічній системі з накладеними
зв'язками зводилися до форми
![]() ,де mi — маси матеріальних точок, — сили,
які на них діють, а — сили реакції,
необхідно й достатньою, щоб робота всіх
сил, включаючи сили інерції на будь-яких
віртуальних переміщеннях дорівнювала
нулю.
,де mi — маси матеріальних точок, — сили,
які на них діють, а — сили реакції,
необхідно й достатньою, щоб робота всіх
сил, включаючи сили інерції на будь-яких
віртуальних переміщеннях дорівнювала
нулю.
 Зв'язкі
ідеальні зазвичай тоді, коли віртуальні
переміщення перпендикулярні до сил
реакції. Наприклад, у випадку маятника,
сила реакції стрижня направлена вздовж
нього, перпендикулярно до траекторії
тіла маятника. При наявності в системі
сили тертя ідеальність зв'язків
втрачається.
Зв'язкі
ідеальні зазвичай тоді, коли віртуальні
переміщення перпендикулярні до сил
реакції. Наприклад, у випадку маятника,
сила реакції стрижня направлена вздовж
нього, перпендикулярно до траекторії
тіла маятника. При наявності в системі
сили тертя ідеальність зв'язків
втрачається.
17. Плоска система збіжних сил. Паралелограм та трикутник сил.
Система збіжних сил - це така система сил, що діють на абсолютно тверде тіло, в якій лінії дії всіх сил перетинаються в одній точці.
Така система сил є на площині статично визначної, якщо число невідомих сил в ній не більше двох (а не трьох, як в інших статично визначених системах). Це обумовлено тим, що у такої системи сил є рівнодіюча, рівна нулю, і її момент дорівнює нулю щодо будь-якої точки площини по теоремі Варіньона, а не виходячи з умов рівноваги статики.
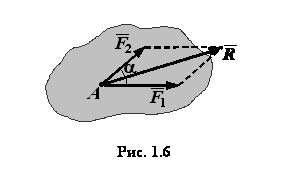
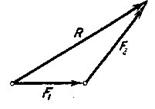
Закон
паралелограма. Рівнодіюча двох сил,
прикладених до однієї точки тіла під
кутом один до одного, виражається за
величиною і за напрямком діагоналлю
паралелограма, побудованого на заданих
силах
(рис.1.6):
![]() .
.
Закон трикутника. При знаходженні рівнодіючої двох сил немає потреби будувати весь паралелограм. Для цього з кінця вектора першої сили проводимо вектор другої сили. Вектор, що з'єднує початкову та кінцеву точки отриманої ламаної лінії буде являти собою за модулем і напрямом рівнодіючу двох даних сил.