

11) Определение ускорений точек плоской фигуры
Покажем,
что ускорение любой точки М плоской
фигуры (так же, как и скорость) складывается
из ускорений, которые точка получает
при поступательном и вращательном
движениях этой фигуры. Положение точки
М по отношению к осям Оxy
(см.рис.30) определяется радиусом-вектором
![]() где
где
![]() .
Тогда
.
Тогда![]() .
.
В
правой части этого равенства первое
слагаемое есть ускорение
![]() полюса А, а второе слагаемое определяет
ускорение
полюса А, а второе слагаемое определяет
ускорение
![]() ,
которое
точка м получает при вращении фигуры
вокруг полюса A.
следовательно,
,
которое
точка м получает при вращении фигуры
вокруг полюса A.
следовательно,![]() .
.
Значение , как ускорения точки вращающегося твердого тела, определяется как
![]()
![]() где
и
- угловая скорость и угловое ускорение
фигуры, а
где
и
- угловая скорость и угловое ускорение
фигуры, а
![]() - угол между вектором
- угол между вектором
![]() и
отрезком МА (рис.41).
и
отрезком МА (рис.41).
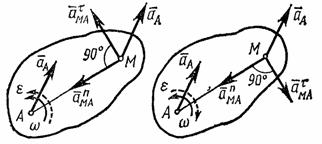
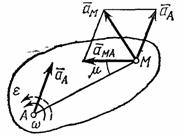
Таким
образом, ускорение любой точки М плоской
фигуры геометрически складывается из
ускорения какой-нибудь другой точки
А, принятой за полюс, и ускорения, которое
точка М получает при вращении фигуры
вокруг этого полюса. Модуль и направление
ускорения
![]() ,
находятся
построением соответствующего
параллелограмма (рис.23).
,
находятся
построением соответствующего
параллелограмма (рис.23).
Однако
вычисление
с
помощью параллелограмма, изображенного
на рис.23, усложняет расчет, так как
предварительно надо будет находить
значение угла
,
а затем - угла между векторами
и
,
Поэтому
при решении задач удобнее вектор
заменять его касательной
![]() и нормальной
и нормальной
![]() составляющими и представить в виде
составляющими и представить в виде
![]() .
.
При
этом вектор
![]() направлен перпендикулярно АМ в сторону
вращения, если оно ускоренное, и против
вращения, если оно замедленное; вектор
направлен перпендикулярно АМ в сторону
вращения, если оно ускоренное, и против
вращения, если оно замедленное; вектор
![]() всегда направлен от точки М к полюсу А
(рис.42). Численно же
всегда направлен от точки М к полюсу А
(рис.42). Численно же
![]()
![]()
![]() .
.
Если
полюс А движется не прямолинейно, то
его ускорение можно тоже представить
как сумму касательной
![]() и нормальной
и нормальной
![]() составляющих, тогда
составляющих, тогда
![]() .
.
Наконец,
когда точка М движется криволинейно и
ее траектория известна, то
можно
заменить суммой
![]() .
.
12) Сложное движение точки
Законы Ньютона сформулированы для движения точки по отношению к инерциальным системам отсчета. Для определения кинематических параметров точки при движении относительно произвольно движущейся системы отсчета вводится теория сложного движения.
Сложным называют движение точки по отношению к двум или нескольким системам отсчета.

На рисунке 3.1 показаны:
- условно принимаемая за неподвижную система отсчета O1x1y1z1;
- движущаяся относительно неподвижной система отсчета Oxyz;
- точка M, перемещающаяся по отношению к подвижной системе отсчета.
Движение точки M в данном случае является сложным. Её движение по отношению к подвижной системе отсчета называют относительным движением.
Движение той точки подвижной системы отсчета, в которой в данный момент находится движущаяся точка, по отношению к неподвижной системе отсчета называют переносным движением. Движение точки M по отношению к неподвижной системе отсчета называют абсолютным движением.
По аналогии с этими определениями будут называться относительные, переносные и абсолютные скорости и ускорения точки. Для их обозначения в относительном движении часто всего используется индекс r (relative – относительный) -Vr, ar ; в переносном движении индекс e (entrained - увлекать за собой) -Ve , ae .
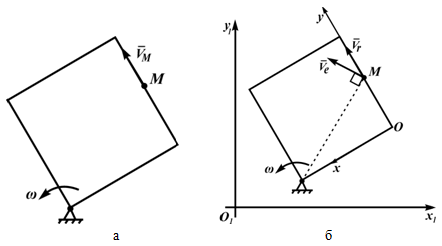
Ниже приведен пример сложного движения точки -M.
На рисунке 3.2,а показан квадрат, вращающийся в плоскости чертежа вокруг неподвижной точки. По стороне квадрата движется точка M. Она участвует в двух движениях, поэтому можно ввести две системы отсчета: неподвижную, например, O1x1y1z1 - по отношению к которой вращается квадрат и подвижную Oxyz , скрепленную с квадратом, по оси Oy которой движется точка M (рисунок 3.2,б).
Движение точки M по стороне квадрата (по оси Oy скрепленной с квадратом подвижной системы) является относительным - скорость в этом движении Vr . Вращение точки M вместе с квадратом - переносное движение, скорость в этом движении - Ve . Абсолютное движение является результатом сложения переносного и относительного движений.