

§ 82. Наблюдения за горизонтальными перемещениями фотограмметрическим методом
Фотограмметрический метод измерений величин смещений используют при определении смещений большого числа деформационных марок. Он основан на получении измерительных фотоснимков объекта в нулевом и теку-
337
/Х>
Рис.
120. Схема определения смещений
фотограмметрическим методом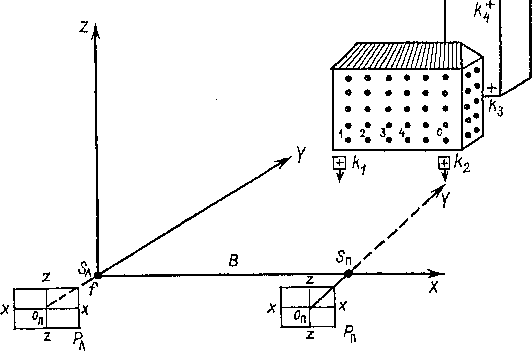
щем циклах наблюдений. По этим снимкам определяют изменение координат идентичных точек в циклах.
Для съемок используют фототеодолиты или метрические камеры, так как они оснащены уровнями для установки плоскости снимка под заданным углом к горизонту и ориентирующим устройством, подобным теодолиту, для установки оптической оси фотокамеры в заданном направлении.
Наиболее простым в обработке, универсальным и точным считают способ определения смещений по снимкам, параллельным основной плоскости сооружения. Одиночные снимки позволяют определить величины смещений точек сооружений в плоскости, параллельной снимку, а стереопара снимков, снятых с базиса В, параллельного плоскости сооружения — в трех взаимно перпендикулярных плоскостях.
На рис. 120 показаны левая (5Л) и правая (5П) станции фотографирования, расположенные параллельно фасаду здания, на котором закреплены деформационные марки 1, 2, 3, ..., i. Вне зоны деформаций закреплены контрольные точки Кг, К2, К3, КА. Ось X фотограмметрической системы координат совмещена с линией базиса В (5Л, Sn), главные лучи 0Л5Л и Оп5и левого и правого снимков перпендикулярны к линии базиса. В этом случае
338
координаты точек сооружения определяют по формулам: Х = Вх/р; У = Bf/p; Z = Bz/p.
Смещения деформационных марок АХ, АУ, AZ вычисляют, как и при наблюдениях геодезическими методами, по формуле (151).
Величины АХ, А У, A Z будут истинными смещениями точек объекта, если место расположения камеры и элементы ориентирования снимка при каждой последующей съемке сохраняются неизменными. Это достигается установкой камеры на стационарные штативы или тумбы, обеспечивающие точную установку камеры в ту же точку и тщательным ее ориентированием при помощи уровней и ориентирующего устройства.
Правильность установки камеры контролируется сравнением координат контрольных kx—k:i точек иа снимках нулевого и текущего циклов. Контрольные точки следует располагать вне зоны деформации, так как они должны быть неподвижны.
Если возникают разности координат одноименных контрольных точек
^kj ~ ^hj ^7ю> ” %hj
где k — номер контрольной точки, / — номер текущего цикла, то они являются функцией изменения элементов ориентирования снимков и записываются в виде полинома:
bxh = а о axxln + a,xluzkn -f ад,в + ед£о;
6zh = Со + aiXkaZke + a2zl0 + ед0 + ед^, (154)
где хка, zko — координаты контрольной точки с номером к на снимке нулевого цикла.
При наличии на снимке трех контрольных точек, не лежащих на одной прямой /гь А\,, к-л (см. рис. 120), составляют систему из 6-ти уравнений вида (154), из решения которой находят значения коэффициентов аи ct {i = 0, 1, 2, 3, 4).
Если в формулах (154) вместо координат контрольных точек использовать координаты деформационных точек, измеренных по снимкам (х'к}, 4/)» и вычисленные по контрольным точкам величины щ, сч, то получим поправки 6xhji bzhj в измеренные координаты, компенсирующие влияние изменения элементов ориентирования снимка в /-ом цикле относительно нулевого цикла:
Xhj = 4/ + zhj = г*/ Н- 6z,t7-.
Координаты x/u-, zw можно использовать для вычисления разностей координат по формулам:
AXkJ = Bxh]/phj — BxhQ/phQ = В (xhj/phJ — xh0/ph0);
АУ/ij = Bf!phJ — Bf/ph0 = Bf(\/phj— 1 /рЛ0);
AZW = Bz//7AJ — Bzho/pho = В (z/ti,/p/i;- — z/l0/p/{0),
где xkj, zhj, phj — исправленные значения координат и параллаксов точки k на снимках /-го цикла; *ft0l zftG, /?/i0 — исправленные координаты и параллаксы точки & иа снимке нулевого цикла; Я, / — базис фотографирования и фокусное расстояние камеры. ! '
Часто смещения точек сооружений измеряют тоЛько в плоскости X, Z, т. е. в плоскости снимка. В этой;случае сооружение фотографируют с одной станции, величину У измеряют геодезическими методами, а для вычисления величин АХ, AZ используют формулы
Xxkj = Уxhj/f — Уxh0/f = У Axhj/f\ AZhj = У Azkj.
При измерении деформаций величины Axhj, Azhj весьма малы, поэтому для повышения точности их измереиий применяют способ временного параллакса. Снимок нулевого цикла закладывают в левую кассету стереокомпаратора, а снимок деформационного цикла в правую кассету. При отсутствии смещений точек объекта и сохранении неизменными элементов ориентирования снимков, наблюдатель бинокулярно наблюдает плоскую картину объекта. При наличии смещений, сдвиги в плоскости X, У воспринимаются наблюдателем как пространственное искривление плоской картины. Эти сдвиги (Ax', Аг') измеряют путем стереоскопического наведения марки на точку объекта движениями одной правой каретки стереокомпаратора или параллактическими винтами продольного и поперечного параллаксов.
Если при измерении на стереокомпараторе значения Ах'к], AZkj на контрольных точках не равны нулю, то в измеренные значения Axhit Azh:j на всех определяемых точках следует ввести поправки LxhJ-, SzhJ- в соответствии с формулами (154), за счет изменившихся значений элементов ориентирования снимков
~ Axf{j -j- &X}tj, AZ]tj = Azkj -j- $Zkj.
Расчеты погрешностей измерений и практика применения фотограмметрии для измерения деформаций показывают, что относительные погрешности определения смещений по осям Л', У имеют следующие значения:
/// tn
ж 1/25 ООО — 1/4000; —~~ « 1/10 000;
1/2000- 1/25 000.