

Общая психология Раздел: «Психомоторика и психофизиология активности» Вопросы к экзамену
Работа Сеченова «Рефлексы головного мозга» и её значение для развития представлений о принципах управления движением.
Построение движений по принципу рефлекторной дуги и рефлекторного кольца (схема рефлекторного кольца по Бернштейну Н.А.).
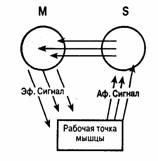
Схема рефлекторного кольца. Существует определенная схема осуществления механизмов движения. Она была названа Бернштейном схемой рефлекторного кольца. Эта схема основана на принципе сенсорных коррекций и является его дальнейшим развитием. В упрощенном виде эта схема выглядит так: из моторного центра (М) в мышцу (рабочую точку мышцы) поступают эффекторные команды. От рабочей точки мышцы идут афферентные сигналы обратной связи в сенсорный центр. В ЦНС происходит переработка поступившей информации, т. е. перешифровка ее в моторные сигналы коррекции, после чего сигналы вновь поступают в мышцу. Получается кольцевой процесс управления.
|
|
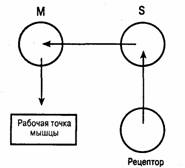
Принципиальное различие концепций построения движений на основе рефлекторной дуги и рефлекторного кольца[6]. В этой схеме рефлекторная дуга выглядит как один из ее частных случаев, когда совершаются движения, не нуждающиеся в коррекции, т. е. движения рефлекторной природы. Позднее Бернштейн детализировал схему рефлекторного кольца. В схеме присутствуют следующие элементы: моторные «выходы» (эффектор), сенсорные «входы» (рецептор), рабочая точка или объект (если речь идет о предметной деятельности), блок перешифровки, программа, регулятор, задающий прибор, прибор сличения. С наличием большего количества элементов рефлекторное кольцо функционирует таким образом: в программе записаны последовательные этапы сложного движения. В каждый конкретный момент отрабатывается какой-то частный этап или элемент, соответствующая частная программа запускается в задающий прибор. Из задающего прибора сигналы (SW — «то, что должно быть») поступают на прибор сличения. На тот же блок от рецептора приходят сигналы обратной связи (IW — «то, что есть»), сообщающие о состоянии рабочей точки. В приборе сличения эти сигналы сравниваются, и на выходе из него получаются сигналы рассогласования (В\У) между требуемым и фактическим положением вещей. Далее они попадают на блок перешифровки, откуда выходят сигналы коррекции, которые через промежуточные инстанции (регулятор) попадают на эффектор. В данной схеме, по мнению Бернштейна необходимо обратить внимание на одну деталь: рецептор не всегда посылает сигналы на прибор сличения и бывают случаи, когда сигнал поступает сразу на задающий прибор. Это бывает в тех случаях, когда экономичнее перестроить движение, чем его корректировать. Это особенно важно в экстренных ситуациях.
Трудности управления движением. Внешние и внутренние силы. Координация двигательных актов. Принцип обратных связей. Принцип сенсорных коррекций.
Основные трудности управления движениями
Для того чтобы понять необходимость всей той сложной, многоуровневой системы управления, необходимо иметь ясное представление о тех трудностях, которые приходится преодолевать нервной системе в процессе управления движениями. Эти трудности обусловлены следующими причинами:
необычайное богатство подвижности двигательного аппарата человеческого тела, требующее распределения внимания между десятками и сотнями видов подвижности с целью стройного согласования их между собой;
необходимость ограничения огромного избытка степеней свободы, которыми насыщено человеческое тело;
упругая податливость мышечных тяг, которые не могут так же точно и строго передавать движение, как твердые рычаги машин или жесткий буксир;
множество внешних сил (инерции, трения, реактивных и др.), возникающих в процессе движения, направленность и интенсивность действия которых трудно (а зачастую и невозможно) предугадать.
В своей повседневной жизни человек нисколько не задумывается о существовании этих трудностей, легко выполняя многие сложные двигательные действия. Вместе с тем каждой из этих трудностей в отдельности достаточно, чтобы сделать невыполнимой задачу создания искусственного механизма, хотя бы в отдаленной степени сравнимого по своей управляемости с человеческим организмом.
Многие сложнейшие физиологические устройства здорового организма человеком просто не замечаются, пока не возникают случаи, когда это устройство вдруг выбывает из строя. Только тогда и обнаруживается, как оно важно в норме и какие огромные нарушения вызываются его расстройством. Так происходит, например, в случаях нарушения чувствительных проводящих путей спинного мозга, по которым передаются ощущения от суставно-мышечного аппарата (обратная афферентация) при заболеваниях спинной сухоткой, или табесом. При этом теряется возможность ощущать положение той или иной части тела (в повседневной жизни так может получиться, если отсидеть или отлежать руку или ногу). У больных полностью нарушается координация движений, хотя сами мышцы еще в принципе сохраняют свои функции: они или вообще не могут ходить, или с трудом передвигаются с опорой на два костыля при обязательном зрительном контроле движений.
Какое огромное распределение внимания потребовалось бы, если бы всеми элементами сложного движения, например такого, как ходьба, бег, метание, нужно было управлять сознательно, с обращением внимания на каждый из них! Одна только такая трудность может сделать движение неуправляемым.
Однако она выглядит совсем незначительной по сравнению с другой, которая связана с необыкновенной подвижностью человеческого тела. Подвижность кинематических цепей тела человека огромна и исчисляется десятками степеней свободы. Так, подвижность запястья относительно лопатки насчитывает 7 степеней свободы, а подвижность кончиков пальцев относительно грудной клетки – 16. Для сравнения надо отметить, что подавляющее большинство машин, работающих без непрерывного управления человеком, при всей кажущейся их сложности обладают всего одной степенью свободы, т.е. тем, что называется вынужденным движением.
Две степени свободы встречаются редко. Переход от одной степени свободы к двум означает огромный качественный скачок. Две степени означают, что подвижная точка получает свободу выбора любой из бесконечного множества доступных траекторий движения. Одним из редких примеров в технике может служить автоматическое управление морским судном, представляющее собой соединение мощного и точного компаса и передачи к машинам, управляющим рулем. Благодаря этому устройству корабль, имеющий на поверхности моря две степени свободы (т.е. возможность двигаться в любом направлении), автоматически направляется по одному совершенно определенному пути. Этот пример показывает, что выбор пути в таких условиях может происходить только на основе постоянного контроля за ходом движения со стороны бдительного органа чувств, роль которого в данном случае выполняет компас.
Три степени свободы означают для вещественной точки абсолютную свободу передвижения внутри какого-то участка пространства, границ которого она в состоянии достигнуть. Например, тремя степенями свободы обладает совершенно ничем не связанная вольно порхающая в воздухе пушинка.
Таким образом, трудность номер один, которая создается необходимостью распределять внимание между множеством подвижных шарниров (суставов), оказывается не столь значимой по сравнению с трудностью номер два – необходимостью преодоления непомерного избытка степеней свободы, которыми насыщено человеческое тело.
Координация – это и есть преодоление избыточных степеней свободы органов движения, превращение их в управляемые системы.
Очередная трудность управления связана с особенностями мышечной тяги. Мышцы – это единственное средство, которым располагает наш организм для совершения работы, т.е. активных телодвижений. Они представляют собой своеобразные упругие жгуты, которыми подвижные части тела оснащены со всех сторон.
Управление движениями посредством упругих тяг представляет собой очень большие трудности, потому что двигательный результат здесь зависит не только от того, как ведут себя сами тяги, но и от множества других, побочных и неподвластных причин, среди которых ведущую роль играет действие уже упоминавшихся всевозможных внешних сил.
Каким же образом организму удается справиться с таким многообразием, на первый взгляд, неразрешимых трудностей, да еще и так, что человек их даже не замечает, а зачастую и не догадывается об их существовании? Располагая неограниченными возможностями в плане подвижности, человеческое тело может быть управляемым только в том случае, если каждая из степеней свободы будет «обуздана» определенным видом чувствительности, который будет вести за ней непрерывный контроль и корректировку.
Поэтому спасительным принципом, обеспечивающим управляемость костно-мышечного двигательного аппарата человека, явился принцип контроля над движением при помощи чувствительной (афферентной) сигнализации, непрерывно поступающей от органов чувств, и внесения на ее основе непрерывных поправок в каждый момент движения. Этот принцип назван Н.А. Бернштейном принципом сенсорных коррекций («сенсорный» в переводе с латинского – «опирающийся на чувствительность»). При этом преобладающей является мышечно-суставная (проприоцептивная) чувствительность. «Проприоцептивный» («сам себя воспринимающий») – это чувствительность собственного тела. Все другие виды чувствительности (зрение, слух, осязание и др.) в различных случаях в большей или меньшей степени выступают лишь в роли помощников проприоцептивной чувствительности.
Найдя такой эффективный принцип преодоления всевозможных трудностей управления, природа в дальнейшем позаботилась о формировании и совершенствовании нервных структур и механизмов, обеспечивающих его реализацию. В результате мы и получили то устройство нервной системы, которое обеспечивает как управление уже освоенными движениями, так и процесс формирования новых двигательных действий.
Принцип сенсорных коррекций. Н. А. Бернштейн предложил совершенно новый принцип управления движениями, который был назван принципом сенсорных коррекций. Рассмотрим факторы, которые, по мнению Бернштейна, оказывают влияние на ход выполнения движения. Во-первых, это реактивные силы. И рассматривал пример: если человек сильно взмахнет рукой, то в других частях тела у него разовьются реактивные силы, которые изменят их положение и тонус. Во-вторых, это инерционные силы. Если человек резко поднимет руку, то она взлетает вверх не только за счет тех моторных импульсов, которые посланы в мышцы, но с какого-то момента движется по инерции, т. е. возникают определенные инерционные силы. Н. А. Бернштейн считал, что явление инерции присутствует в любом движении. В-третьих, это внешние силы, которые оказывают влияние на ход выполнения движения. Пример: если движение направлено на какой-либо предмет, то оно встречает с его стороны сопротивление. И это сопротивление чаще всего оказывается непредсказуемым. Четвертый фактор, по мнению Н. А. Бернштейна: это исходное состояние мышц. Состояние мышцы меняется при выполнении движения вместе с изменением ее длины, а также в результате утомления и других причин. Поэтому один и тот же моторный импульс, достигнув мышцы, может дать совершенно иной результат[6]. Существует целый перечень факторов, оказывающих непосредственное воздействие на ход выполнения движения. Центральной нервной системе, по мнению Бернштейна необходима постоянная информация о ходе выполнения движения. Эта информация получила название сигналов обратной связи. Эти сигналы могут одновременно поступать от мышц в мозг по нескольким каналам. Он приводит пример: когда мы двигаемся, информация о положении отдельных частей тела поступает от проприоцептивных рецепторов. Однако параллельно информация поступает через органы зрения. Аналогичная картина наблюдается даже при выполнении речевых движений. Человек получает информацию не только от рецепторов, контролирующих движения языкового аппарата, но и через слух. Причем информация, поступающая по разным каналам, должна быть согласованной, иначе выполнение движения становится невозможным.
Происхождение и развитие двигательных функций в филогенезе! (Н.А. Бернштейн). Общая характеристика уровней построения движения.
Уровни построения движений. Помимо рефлекторного кольца Бернштейн выдвинул идею об уровневом построении движений. В ходе своих исследований он обнаружил, что в зависимости от
|

того, какую информацию несут сигналы обратной связи — сообщают ли они о степени напряжения мышц, об относительном положении частей тела, о предметном результате движения и т. д., — афферентные сигналы приходят в разные чувствительные центры головного мозга и переключаются на моторные пути на разных уровнях. Под уровнем следует понимать буквально «слои» в ЦНС, Так были выделены уровни спинного и продолговатого мозга, уровень подкорковых центров, уровень коры. Каждый уровень имеет специфические, свойственные только ему моторные проявления, каждому уровню соответствует свой класс движений. Уровень А — самый низкий и филогенетически самый древний. У человека он не имеет самостоятельного значения, но отвечает за важнейший аспект любого движения — тонус мышц. На этот уровень поступают сигналы от мышечных проприорецепторов, которые сообщают о степени напряжения мышц, а также информация от органов равновесия. Самостоятельно этот уровень регулирует весьма немногочисленные движения. В основном они связаны с вибрацией и тремором. Например, стук зубов от холода. Уровень В — уровень синергий. На этом уровне перерабатываются сигналы в основном от мышечно-суставных рецепторов, которые сообщают о взаимном положении и движении частей тела. Этот уровень оторван от внешнего пространства, но очень хорошо «осведомлен» о том, что делается в «пространстве тела». Уровень В принимает большое участие в организации движений более высоких уровней, и там он берет на себя задачу внутренней координации сложных двигательных ансамблей. К собственным движениям этого уровня относятся потягивания, мимика и т. д. Уровень С. Этот уровень Бернштейн назвал уровнем пространственного поля. На данный уровень поступают сигналы от зрения, слуха, осязания, т. е. вся информация о внешнем пространстве. Поэтому на данном уровне строятся движения, приспособленные к пространственным свойствам объектов — к их форме, положению, длине, весу и пр. К движениям данного уровня относятся все переместительные движения. Уровень D — уровень предметных действий. Это уровень коры головного мозга, отвечающий за организацию действий с предметами. К этому уровню относятся все орудийные действия и манипуляции с предметами. Движения на этом уровне представлены как действия. В них не фиксирован двигательный состав, или набор движений, а задан лишь конкретный результат. Уровень Е — наивысший уровень — уровень интеллектуальных двигательных актов. К этому уровню относятся: речевые движения, движения письма, движения символической или кодированной речи. Движения этого уровня определяются не предметным, а отвлеченным, вербальным смыслом. Бернштейн делает несколько очень важных выводов.
Во-первых, в организации движений участвуют, как правило, сразу несколько уровней — тот, на котором строится движение и все нижележащие уровни. Так, например, письмо — это сложное движение, в котором участвуют все пять уровней. Уровень А обеспечивает тонус мышц. Уровень В придает движениям плавную округлость и обеспечивает скоропись. Уровень С обеспечивает воспроизведение геометрической формы букв, ровное расположение строк на бумаге. Уровень D обеспечивает правильное владение ручкой. Уровень Е определяет смысловую сторону письма. Исходя из этого положения, Бернштейн делает вывод о том, что в сознании человека представлены только те компоненты движения, которые строятся на ведущем уровне, а работа нижележащих уровней, как правило, не осознается.
Во-вторых, формально одно и то же движение может строиться на разных ведущих уровнях. Уровень построения движения определяется смыслом, или задачей, движения. Например, круговое движение, в зависимости от того, как и для чего оно выполняется (движение пальцев, движение тела или действие с предметом), может строиться на любом из пяти уровней. Данное положение показывает решающее значение такой психологической категории, как задача, или цель, движения для организации и протекания физиологических процессов. Этот результат исследований Бернштейна может рассматриваться как крупный научный вклад в физиологию движений.
Иерархическая, многоуровневая организация управления построения движений. Ведущий и фоновые уровни.
Иерархия форм двигательной активности (по Н.А. Бернштейну). Наиболее полно проблема иерархической организации движений человека в контексте активного приспособительного поведения была поставлена и разработана в трудах выдающегося отечественного физиолога Н.А. Бернштейна. Он разработал теорию уровней построения движений. Причем под уровнями он понимал морфологические отделы нервной системы: спинной и продолговатый мозг, подкорковые центры и кору больших полушарий. Каждому уровню соответствует свой тип движений. Всего Н.А. Бернштейн выделил пять уровней: А, В, С, Д, Е. 1. Уровень А — эволюционно наиболее древний и созревающий раньше других руброспинальный уровень. У человека он не имеет самостоятельного значения, но он определяет мышечный тонус и участвует в обеспечении любых движений совместно с другими уровнями. Есть некоторые формы двигательной активности, которые осуществляются только за счет данного уровня (к их числу относятся непроизвольные примитивные движения, например, дрожание пальцев, стук зубов от холода). Этот уровень начинает функционировать с первых недель жизни новорожденного. 2. Уровень В — таламопалидарный уровень, обеспечивает переработку сигналов от мышечно-суставных рецепторов, которые сообщают о взаимном расположении частей тела. Этот уровень принимает участие в организации движений более сложного типа, которые, однако, не требуют учета особенностей внешнего пространства. Это могут быть произвольные движения лица и тела — мимика и пантомимика, вольная гимнастика и др. Этот уровень начинает функционировать уже во втором полугодии жизни ребенка. 3. Уровень С — определяется как уровень пространственного поля или пирамидно-стриальный уровень. На этот уровень поступает информация о состоянии внешней среды от экстерорецепторных анализаторов. Поэтому этот уровень отвечает за построение движений, приспособленных к пространственным свойствам объектов — к их форме, положению, весу и другим особенностям. Среди них все виды локомоции (перемещения), тонкая моторика рук и другие. Это уровень, в обеспечении которого наряду с подкорковыми структурами принимает участие кора. Поэтому его созревание, начинаясь очень рано — на первом году жизни, продолжается на протяжении всего детства и даже юности. 4. Уровень Д — уровень предметных действий. Он функционирует при обязательном участии коры (теменных и премоторных зон) и обеспечивает организацию действий с предметами. Это специфически человеческий уровень организации двигательной активности, поскольку к нему относятся все виды орудийных действий и манипуляторных движений. Характерная особенность движений этого уровня состоит в том, что они не только учитывают пространственные особенности, но и согласуются с логикой использования предмета. Это уже не только движения, но и в значительно большей степени действия, потому что используемые здесь моторные программы складываются из гибких взаимозаменяемых звеньев. Поскольку этот уровень обеспечивается согласованной активностью разных зон коры, его функциональные возможности будут определяться динамикой созревания как самих зон, так и возрастными особенностями межзонального взаимодействия. 5. Уровень Е — высший уровень организации движений, обеспечивает интеллектуализированные двигательные акты: работу артикуляционного аппарата в звучащей речи, движения руки при письме, а также движения символической или кодированной речи (язык жестов глухонемых, азбука Морзе). Нейрофизиологические механизмы этого уровня обеспечиваются высшими интегративными возможностями коры больших полушарий, поэтому созревание коры, как и в предыдущем случае, имеет решающее значение для его функционирования.
Природа навыка и тренировки. Все прижизненно онтогенетически приобретенные двигательные возможности обозначаются обобщенно термином двигательные навыки, процессы же их намеренной сознательной выработки объединяются в понятии двигательной тренировки. Подобные навыки приобретаются по каждому из координационных уровней, и каждый навык в отдельности часто представляет очень сложную, многоуровневую структуру. Формирование двигательного навыка есть на каждом этапе активная психомоторная деятельность. Вся диалектика развития навыка состоит в том, что там, где есть развитие, там каждое следующее исполнение лучше предыдущего, т. е. не повторяет его; поэтому упражнение есть в частности повторение без повторения. Разгадка этого кажущегося парадокса в том, что правильно проводимое упражнение повторяет раз за разом не то или иное средство решения данной двигательной задачи, а процесс решения этой задачи, от раза к разу изменяя и совершенствуя средства. Для каждого двигательного акта, потенциально доступного человеку, в его центральной нервной системе имеется адекватный уровень построения, способный реализовать основные сенсорные коррекции этого акта, соответствующие его смысловой сущности. Но чем сложнее движение, тем многочисленнее и разнообразнее требующиеся для его выполнения сенсорные коррекции. В связи с этим по мере выработки данного двигательного акта в его выполнении начинает принимать целая иерархия уровней. Наивысший из них для данного акта, берущий на себя реализацию основных смысловых коррекций, мы обозначаем как ведущий уровень для этого движения. Подчиненные нижеследующие уровни, обеспечивающие выполнение вспомогательных, технических коррекций, мы называем фоновыми уровнями. Прижизненно вырабатываемые двигательные фоны обычно обозначаются термином «автоматизмы», а сам процесс их выработки – термином «автоматизация двигательного акта». Оба названия объясняются именно тем, что фоновые компоненты движений остаются за порогами сознания. Как только какая-нибудь группа координационных коррекций переключается из ведущего уровня в фоновый, наиболее адекватный для нее по качеству и составу его коррекций, так она уходит из поля сознания, автоматизируется. На основе этого краткого схематизированного анализа мы можем яснее проследить физиологические пути выработки нового двигательного навыка в онтогенезе. В самом начале освоения нового движения все применяемые для него коррекции совершаются на его ведущем уровне. Исключение составляют наиболее обобщенные низовые коррекции, которые являются изначальной подкладкой почти всякого движения, выработавшейся уже на самых ранних стадиях онтогенеза, а также коррекции, случайно имеющиеся в готовом виде от ранее освоенных движений. Так как ни один уровень не универсален настолько, чтобы обладать адекватными коррекциями для всех сторон движения, то поневоле вначале всякое движение совершается неуклюже, при временном содействии более или менее подходящих коррекций, какие данный ведущий уровень в состоянии предоставить данному движению. Отсутствие автоматизмов вызывает при этом большую перегрузку сознания, вынужденного вникнуть в каждую техническую подробность движения. В процессе тренировки происходит постепенное выделение фоновых компонентов, которые переадресовываются ведущим уровнем в тот из более низовых уровней, в котором имеются предпосылки для наилучшего выполнения именно этих коррекций. По мере выработки в низовых уровнях соответственных фоновых автоматизмов все больший процент технических фонов уходит из поля сознания, разгружая этим ведущий уровень и в то же время находя для себя условия значительно более точного и совершенного исполнения. Из всего изложенного с необходимостью следует, что каждое переключение той или иной компоненты движения из ведущего уровня в фоновый является во-первых, более или менее внезапным скачкообразным изменением в процессе движения, а во-вторых, обязательным качественным скачком, поскольку первоначальные коррекции этой слагающей сменяются при этом качественно совершенно иным. Процесс разверстки фоновых компонент движения по соответствующим уровням сложен, потому что ему необходимо должно предшествовать определение и выявление этих компонент. В каждом двигательном акте мы должны различать: 1) его смысловую структуру и 2) и его двигательный состав. Смысловая структура целиком вытекает из существа возникшей двигательной задачи и определяет ведущий уровень построения, которому эта задача приходится «по плечу». Двигательный же состав определяется ни одной только задачей, а ее столкновением с двигательными возможностями особи, устройством кинематических цепей этой особи, наличие того или другого орудия, содержанием накопленного к этому времени психомоторного опыта и т. д. Задачу вдевания нитки в иглу мужчины и женщины разрешают обычно прямо противоположными способами. Сущность процесса автоматизации, требующего иногда длительного времени и настойчивого упражнения, состоит именно в выработке центральной нервной системой плана описанной выше разверстки фонов: в определении двигательного состава действия; попутно начинается и само существование этой разверстки указанным выше порядком.
Развитие двигательного навыка по Н.А. Бернштейну. Общие положения. Критика условно-рефлекторного подхода.
Структура двигательных навыков. Концепция Н. А Берштейна исходит из ряда фундаментальных принципов научения. Во-первых, это принципы упражняемости. Н. А .Берштейн заметил, что, в то время как технические устройства изнашиваются от многократного выполнения того или иного действия, живые организмы характеризуются улучшением каждого следующего исполнения действия по сравнению с предыдущим. Во-вторых, речь идет о принципе «повторения без повторения», заключающемся в том, что каждое новое действие—не слепое копирование предшествующего, а его развитие. По мнению Н. А. Берштейна, живое движение—это постоянно совершенствующаяся система, и поэтому его нельзя описывать в механистических терминах «стимул- реакция». В-третьих, Н. А. Берштейн говорил о том, что каждый новый навык—это двигательная задача, которую организм решает при помощи всех наличных средств с учетом внешних и внутренних обстоятельств. Суть выработки навыка заключается в открытии принципа решения двигательной задачи. В решении двигательной задачи существует несколько этапов. На первом этапе происходит разделение на смысловую структуру и двигательный состав действия (А что я собственно хочу сделать? Как мне удастся это сделать?). Пример: смысловой структурой может быть желание плыть, а двигательным составом—способ исполнения этого замысла (кроль или брасс). На втором этапе происходит выявление и роспись («прощупывание») сенсорных коррекций. Одной из значительных услуг Н. А. Берштейна стало то, что он отказался от понятия «рефлекторная дуга», выработанного еще Декартом, и перешел к понятию рефлекторное кольцо. Суть этого перехода заключается в том, что навык не может быть стереотипной последовательностью выученных действий, на всем его протяжении требуется постоянная сверка движения с наличными условиями. Постоянную координирующую информацию, которую наш сенсорный аппарат получает по ходу разворачивания навыка, Н. А. Берштейн и назвал сенсорные коррекции. Разница между определением двигательного состава и «прощупыванием» сенсорных коррекций заключается в том, что на первом этапе учащийся устанавливает, как выглядят те движения, из которых складывается навык с позиции наблюдателя. А на втором — пытается ощутить эти движения изнутри. На этом этапе необходимо максимальное количество повторений, каждое из которых будет не механическим возобновлением движения, а его модификацией. Работа с навыком осуществляется здесь на сознательном уровне. Человек старается разобраться в движении и подобрать уже готовые двигательные автоматизмы из своего личного репертуара движений. А может быть и создать новые. Как пишет Н. А. Берштейн: «Секрет освоения движения заключается не в каких-то особых телодвижениях, а в особого рода ощущениях. Их нельзя показать, а можно только пережить». На этом этапе формирования навыка новое звучание приобретает проблема «переноса» навыка. Феномен переноса навыка заключается в том, что овладение навыком выполнения одной задачи может улучшать результаты выполнения другой задачи. На третьем этапе формирования происходит «разверстка фонов», т.е. автоматизация двигательного навыка. Сформированные на предшествующем этапе сенсорные коррекции покидают сознание и начинают выполняться автоматически. Постепенно все большая часть навыка становится практически независимой от сознания. Задачей четвертого этапа является срабатывание фоновых коррекций. Все компоненты навыка интегрируются в единое целое. Пятый этап – это этап, на котором происходит стандартизация навыка. Навык делается устойчивым, каждое новое его исполнение все более похоже на предшествующее. И, наконец шестой этап это этап стабилизации. Навык становится устойчивым к помехам, осуществляется будто бы сам собой. Преимущество концепции Н. А. Берштейна перед всеми описанными выше интерпретациями научения заключается в том, что здесь навык представляется иерархически организованной системой. Формирование процедурной системы памяти включает в себя и наблюдение, и инсайт, и выработку реакций. Только взятые в совокупности все «элементы» научения приводят к успешному освоению навыка.
Основные положения теории Н.А. Бернштейна
В основе научного творчества Н.А. Бернштейна лежит его новое понимание жизнедеятельности организма, в соответствии с которым он рассматривается не как реактивная система, пассивно приспосабливающаяся к условиям среды (именно это следует из условно-рефлекторной теории), а как созданная в процессе эволюции активная, целеустремленная система. Иначе говоря, процесс жизни есть не простое «уравновешивание с внешней средой», а активное преодоление этой среды.
Выдающейся его заслугой является то, что он первый в мировой науке использовал изучение движений в качестве способа познания закономерностей работы мозга. По мнению Н.А. Бернштейна, для тех, кто хочет понять, как работает мозг, как функционирует центральная нервная система (ЦНС), в природе едва ли существует более благодатный объект, чем исследование процессов управления движениями. Если до него движения человека изучали для того, чтобы их описать, то Н.А. Бернштейн стал изучать их, чтобы понять, как происходит управление ими.
В процессе исследования этих механизмов им были открыты такие фундаментальные явления в управлении, как сенсорные коррекции и принцип иерархического, уровневого управления, которые лежат в основе работы этих механизмов и без понимания которых правильное представление о закономерностях работы мозга в процессе управления движениями оказывается невозможным.
В соответствии с теорией сенсорных коррекций для выполнения какого-либо движения мозг не только посылает определенную команду мышцам, но и получает от периферийных органов чувств сигналы о достигнутых результатах и на их основании дает новые корректирующие команды. Таким образом, происходит процесс построения движений, в котором между мозгом и исполнительными органами существует не только прямая, но и непрерывная обратная связь.
Дальнейшие исследования привели Н.А. Бернштейна к гипотезе о том, что для построения движений различной сложности команды отдаются на различных уровнях (иерархических этажах) нервной системы. При автоматизации движений функции управления передаются на более низкий (неосознаваемый) уровень.
Еще одно из замечательных достижений Н.А. Бернштейна представляет собой открытое им явление, которое он назвал «повторением без повторения». При повторении одного и того же движения (например, шагов в ходьбе или беге), несмотря на один и тот же конечный результат (одинаковая длина, время выполнения и т.п.), путь работающей конечности и напряжения мышц в чем-то различны. При этом многократные повторения таких движений не делают эти параметры одинаковыми. Если соответствие и встречается, то не как закономерность, а как случайность. А это значит, что при каждом новом выполнении нервная система не повторяет одни и те же команды мышцам и каждое новое повторение совершается в несколько отличных условиях. Поэтому для достижения одного и того же результата нужны не одинаковые, а существенно различные команды мышцам.
На основании этих исследований был сформулирован важнейший для обучения движениям вывод: тренировка движения состоит не в стандартизации команд, не в «научении командам», а в научении каждый раз отыскивать и передавать такую команду, которая в условиях каждого конкретного повторения движения приведет к нужному двигательному результату.
Из всего этого следует еще один важный вывод: движение не хранится готовым в памяти, как это следует из условно-рефлекторной теории (и как, к сожалению, многие думают до сих пор), не извлекается в случае нужды из кладовых памяти, а каждый раз строится заново в процессе самого действия, чутко реагируя на изменяющуюся ситуацию. В памяти хранятся не штампы самих движений, а предписания (логарифмы) для их конструирования, которые строятся на основе механизма не стереотипного воспроизведения, а целесообразного приспособления.
Неоценимое значение имеет теория Н.А. Бернштейна и для понимания роли сознания в управлении движениями. Во многих учебных пособиях до сих пор можно встретить утверждение о том, что проникновение сознанием в каждую деталь движения содействует повышению скорости и качества его освоения. Это слишком упрощенное и во многом ошибочное утверждение. Нецелесообразность и даже принципиальная невозможность подобного тотального контроля со стороны сознания очень образно и убедительно могут быть продемонстрированы в ряде примеров. Приведем один из них.
Для этого рассмотрим, каким образом обеспечивается деятельность такого исключительного по своей сложности, точности, подвижности и жизненной важности органа, каким является зрительный аппарат человека.
Его двигательную активность обеспечивают 24 работающих попарно мышцы. Все эти мышцы осуществляют свою работу в тончайшем взаимном согласовании с раннего утра и до позднего вечера, причем совершенно бессознательно и в большинстве своем непроизвольно. Нетрудно себе представить, что если бы управление этими двумя дюжинами мышц, осуществляющих всевозможные согласования поворотов глаз, управление хрусталиком, расширение и сужение зрачков, наведение глаз на фокус и т.п., требовало произвольного внимания, то на это понадобилось бы столько труда, что лишило бы человека возможности произвольного управления другими органами тела.
Психофизиология активности. Модель «потребного будущего». Принцип микроэтапной корригируемости и принцип исходной преформированности.
Система «ошибок и поправок», «модель потребного будущего»
Постоянный учет того, совпадает ли полученный результат с ожидаемым, является важнейшим условием нервной деятельности, образуя как бы четвертое звено рефлекторного акта. С этих позиций понятие и термин «рефлекторная дуга» может быть дополнен представлением о рефлекторном кольце, рефлекторном круге. И в самом деле, в любом рефлекторном акте механизм обратной связи играет решающую роль, сигнализируя о выполнении конечной цели. Рефлекторные кольца, собственно говоря, и лежат в основе саморегулирующихся механизмов.
Расширяя и распространяя положение об обратных связях на соотношение и соподчиненность различных отделов головного мозга, можно говорить об успехе или неудаче запрограммированных сложных действий, что ведет в первом случае к прекращению действия, а во втором — к продолжению активного возбуждения. В конечном итоге происходит сравнение того, как выполнено задание, согласовано ли оно с запрограммированной целью, с той «моделью потребного будущего», закодированной в мозге и являющейся основой активности нашего действования. Как высокоорганизованная система управления головной мозг человека устроен так, что он может не только получать, хранить и использовать полученную информацию, но и прогнозировать, вырабатывать план действий, управлять этими действиями для решения определенных задач.
На вопрос, какие именно отделы головного мозга ответственны за программирование действий, ответить затруднительно, хотя, скорее всего, в этом принимают участие многие отделы с учетом их относительной соподчиненности. Так, в коре мозга выделяют первичные корковые зоны, где идут процессы раскодирования и анализа поступающих раздражений — зрительных, слуховых, обонятельных, сенсомоторных; вторичные зоны, где происходят синтез и увязывание поступившей информации с накопленным опытом и осуществляется ассоциативная связь между различными анализаторами.
Принципы развития координации в раннем онтогенезе (Н.А. Бернштейн).
Формирование движений у детей и подростков
Естественные двигательные возможности растущего организма определяются процессом созревания и совершенствования функций двигательных структур центральной нервной системы. Формирование всех отделов мозга, отвечающих за движение, и проводящих их нервных путей заканчивается к 2-летнему возрасту. Дальше уже начинается длительная работа по совершенствованию их функций, по прилаживанию друг к другу всех уровней построения движений, наиболее существенные черты которых происходят между 2 и 14 годами – возрастом окончательного созревания.
Возраст 3 года – это время, когда ребенок окончательно перестает быть «высшей обезьянкой» и впервые осваивает такие двигательные действия, которые совершенно недоступны обезьяне. В этом же возрасте начинает обнаруживаться и неравноценность между правой и левой сторонами тела.
Возраст от 3 до 7 лет представляет собой период преимущественно количественного усиления и накапливания всех уровней построения движений, которые начинают заполняться свойственным им содержанием. Дети этого возраста уже не увальни – они грациозны и подвижны.
Следующий период – это возраст 7–10 лет. Набор двигательных навыков детей пополняется еще двумя – силой и точностью. Это возраст, в котором жизненная практика очень чутко уловила необходимость приучения к трудовым навыкам. Это период перехода в работоспособное состояние пирамидной двигательной системы ребенка. В это время формируются мелкие и точные движения, и ребенку уже есть чем занять себя, сидя за столом. У мальчиков совершенствуются метательные и ударные движения.
После 10–11 лет наступает сложный период «ломки», охватывающей все стороны жизнедеятельности растущего организма, вплоть до 14–15-летнего возраста. Поэтому данный период развития очень трудно охарактеризовать. Гармония и согласие, достигнутые к этому времени между отдельными уровнями построения движений, вновь как бы нарушаются. На них отражаются огромные сдвиги в деятельности желез внутренней секреции, всей многосложной химии пубертатного периода (периода полового созревания).
Такая перестройка всего обмена веществ рассматривается как ударное строительство, которому приносится в жертву многое другое. Одним из следствий является неуклюжесть, временное снижение ловкости, а иногда и силы. Эти нарушения никак не связаны с какими бы то ни было непорядками в самих двигательных системах мозга. Поэтому необходимо спокойно продолжать работу по наполнению уровней свойственным им содержанием, т.е. стараться расширять свой двигательный опыт путем освоения все новых разнообразных движений. Такая систематическая работа очень скоро окажет благотворное влияние как на сами двигательные проявления, так и на душевную, эмоциональную и социальную стороны жизни растущего человека.
Общая характеристика выразительных движений. Линии анализа, принципы и особенности декодирования и интергации.
Признаки уровневой структуры в патологии.
Развитие навыка письма. Собственно фоны и автоматизмы.
Ловкость. Свойства, качества, развитие. Связь ловкости с уровневой структурой и координацией.
Принципы и положения теории регуляции движений и психофизиологии активности в практике общения и взаимодействия.
Место и значение работ Бернштейна в теории и практике психологии.