

Билет 5
1. Электромагнитные реле – это коммутационные ку, в которых управление переключением цепей осуществляется с помощью магнитного поля, создаваемого специальной катушкой индуктивности.
Электромагнитные реле предназначены для выполнения разнообразных функций: дистанционного или автоматического управления работой отдельных устройств, блоков систем или аппаратуры в целом; сопряжения технических устройств, в том числе работающих на различных энергетических уровнях и основанных на разных физических принципах действия; для кодирования, преобразования и распределения электрических сигналов, особенно в многоканальных системах управления, сигнализации, контроля, защиты и т. п.
Принцип действия якорного реле понятен из рис. 11.17, а, приведенного выше. В нейтральном якорном реле постоянного тока при протекании постоянного тока по обмотке электромагнита 1 в магнитопроводе 2 возникает магнитный поток Ф. При этом к зазору прикладывается практически вся магнитодвижущая сила электромагнита. Под действием МДС в зазоре развивается тяговое усилие Fм. Тяговое усилие приводит в движение якорь 3, следствием чего является замыкание или размыкание электрических контактов 5.
В реле переменного тока (рис. 11.18, а) вибрации подвижной системы, возникающие при питании электромагнита переменным напряжением, устраняются путем создания в сердечнике 4 двух или нескольких магнитных потоков, сдвинутых по фазе относительно друг друга. С этой целью на стержне электромагнита около воздушного зазора делается паз, в который вкладывается
короткозамкнутый
виток. Составляющая ![]() основного
магнитного потока, пересекая
короткозамкнутый виток, наводит в нем
ЭДС. В свою очередь, возникновение ЭДС
в короткозамкнутом витке приводит к
появлению в нем индукционного тока и,
как следствие, магнитного потока Фв,
отстающего по фазе от основного магнитного
потока. По этой причине результирующий
магнитный поток в сердечнике никогда
не достигнет нулевого значения.
основного
магнитного потока, пересекая
короткозамкнутый виток, наводит в нем
ЭДС. В свою очередь, возникновение ЭДС
в короткозамкнутом витке приводит к
появлению в нем индукционного тока и,
как следствие, магнитного потока Фв,
отстающего по фазе от основного магнитного
потока. По этой причине результирующий
магнитный поток в сердечнике никогда
не достигнет нулевого значения.
2.
Для
получения простейшей модели электропривода
постоянного тока, описывающей
установившиеся (статические) режимы и
позволяющей получить основные
характеристики, воспользуемся схемой
на рис. 3.1.
Будем полагать, что якорная
цепь питается от независимого источника
с напряжением U* ,
сопротивление цепи якоря R постоянно,
магнитный поток Ф определяется
лишь током возбуждения и не зависит от
нагрузки (реакция якоря не проявляется),
индуктивные параметры цепей пока не
учитываются, поскольку рассматриваются
лишь установившиеся (статические)
режимы.
 Рис.
3.1. Схема электропривода с двигателем
постоянного тока
Взаимодействие
тока I в
обмотке якоря с магнитным потоком Ф,
создаваемым обмотками, расположенными
на полюсах машины, приводит в соответствии
с законом Ампера и возникновению
электромагнитных сил, действующих на
активные проводники обмотки и,
следовательно, электромагнитного
момента М:
М
= kФI (3.1)
где k-
конструктивный параметр машины.
В
движущихся с угловой скоростью
Рис.
3.1. Схема электропривода с двигателем
постоянного тока
Взаимодействие
тока I в
обмотке якоря с магнитным потоком Ф,
создаваемым обмотками, расположенными
на полюсах машины, приводит в соответствии
с законом Ампера и возникновению
электромагнитных сил, действующих на
активные проводники обмотки и,
следовательно, электромагнитного
момента М:
М
= kФI (3.1)
где k-
конструктивный параметр машины.
В
движущихся с угловой скоростью ![]() в
магнитном поле под действием
момента М проводниках
обмотки якоря в соответствии с законом
Фарадея наводится ЭДС вращения Е:
E
= kФw ,
(3.2)
направленная в рассматриваемом
случае встречно по отношению к вызвавшей
движение причине – ЭДС источника
питания U.
В
соответствие со вторым законом Кирхгоффа
для якорной цепи машины справедливо
уравнение:
U-E
= IR.
(3.3)
Уравнения (3.1)-(3.3) – простейшая,
но достаточная для понимания главных
процессов в электроприводе постоянного
тока модель. Для решения практических
задач они должны быть дополнены уравнением
движения с моментом потерь
в
магнитном поле под действием
момента М проводниках
обмотки якоря в соответствии с законом
Фарадея наводится ЭДС вращения Е:
E
= kФw ,
(3.2)
направленная в рассматриваемом
случае встречно по отношению к вызвавшей
движение причине – ЭДС источника
питания U.
В
соответствие со вторым законом Кирхгоффа
для якорной цепи машины справедливо
уравнение:
U-E
= IR.
(3.3)
Уравнения (3.1)-(3.3) – простейшая,
но достаточная для понимания главных
процессов в электроприводе постоянного
тока модель. Для решения практических
задач они должны быть дополнены уравнением
движения с моментом потерь ![]() ,
входящим в Мс,
,
входящим в Мс,
 и
уравнениями цепи возбуждения для
конкретной схемы электропривода.
Разумеется,
в условиях каждой задачи должно быть
строго оговорено, что задано и известно,
а что нужно искать.
Рассмотрим
подробнее роль, которую играет ЭДС Е в
процессе преобразования энергии,
осуществляемом электрической машиной.
Если существовал некоторый установившийся
режимМ1 = Мс1,
а затем Мс изменился,
например, возрос до величины Мс2,
то для получения нового установившегося
режима необходимо иметь средство,
которое изменило бы М,
приведя его в соответствие с новым
значением Мс.
В двигателе внутреннего сгорания эту
роль выполнит оператор, увеличив подачу
топлива; в паровой турбине – специальный
регулятор, который увеличит подачу
пара. В электрической машине эту роль
выполнит ЭДС. Действительно, при
возрастании Мс скорость
двигателя начнет снижаться, значит
уменьшится в соответствии с (3.2) и ЭДС
(полагаем для простоты, что Ф,
а также U и R –
постоянные). Из (3.3) следует,
что
и
уравнениями цепи возбуждения для
конкретной схемы электропривода.
Разумеется,
в условиях каждой задачи должно быть
строго оговорено, что задано и известно,
а что нужно искать.
Рассмотрим
подробнее роль, которую играет ЭДС Е в
процессе преобразования энергии,
осуществляемом электрической машиной.
Если существовал некоторый установившийся
режимМ1 = Мс1,
а затем Мс изменился,
например, возрос до величины Мс2,
то для получения нового установившегося
режима необходимо иметь средство,
которое изменило бы М,
приведя его в соответствие с новым
значением Мс.
В двигателе внутреннего сгорания эту
роль выполнит оператор, увеличив подачу
топлива; в паровой турбине – специальный
регулятор, который увеличит подачу
пара. В электрической машине эту роль
выполнит ЭДС. Действительно, при
возрастании Мс скорость
двигателя начнет снижаться, значит
уменьшится в соответствии с (3.2) и ЭДС
(полагаем для простоты, что Ф,
а также U и R –
постоянные). Из (3.3) следует,
что
![]() ,
следовательно,
ток вырастет, обусловив тем самым рост
момента в соответствии с (3.1). Двигатель
автоматически, без каких-либо внешних
воздействий перейдет в новое установившееся
состояние. Эти процессы будут иметь
место при любых величинах и знаках Мс,
то есть ЭДС будет выполнять функцию
регулятора как в двигательном, так и в
тормозных режимах работы машины.
,
следовательно,
ток вырастет, обусловив тем самым рост
момента в соответствии с (3.1). Двигатель
автоматически, без каких-либо внешних
воздействий перейдет в новое установившееся
состояние. Эти процессы будут иметь
место при любых величинах и знаках Мс,
то есть ЭДС будет выполнять функцию
регулятора как в двигательном, так и в
тормозных режимах работы машины.
3 . В этом двигателе (рис. 8.61, а) ток возбуждения Iв = Ia, поэтому магнитный поток Ф является некоторой функцией тока якоря Ia. Характер этой функции изменяется в зависимости от нагрузки двигателя. При Ia < (0,8 ÷ 0,9)Iном, когда магнитная система машины не насыщена, Ф = kф Ia , причем коэффициент пропорциональности kф в значительном диапазоне нагрузок остается практически постоянным. При дальнейшем возрастании тока якоря поток Ф возрастает медленнее, чем Ia , и при больших нагрузках (Ia > Iном )можно считать, что Ф ≈ const. В соответствии с этим изменяются в зависимости n = f(Ia) иМ = f(Ia).
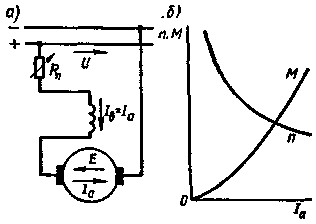
При Ia <(0,8 ÷ 0,9)Iном скоростная характеристика двигателя n = f(Ia) (рис. 8.61, б) имеет форму гиперболы, так как частота вращения
(8.87)
n = |
U - Ia ∑Ra |
= |
U |
- |
Ia ∑Ra |
= C1 |
U |
- C2. |
ceФ |
ce kф Ia |
ce kф Ia |
Ia |
где С1 и С2 - постоянные.
При Ia > Iном скоростная характеристика становится линейной, так как частота вращения
(8.88)
n = |
U - Ia ∑Ra |
= |
U |
- |
Ia ∑Ra |
= C'1U - C'2Ia |
ceФ |
ceФ |
ce Ф |
где С'1 и С'2 — постоянные.
Аналогично можно получить зависимость электромагнитного момента от тока якоря М = f(Ia). При Ia < (0,8 ÷ 0,9) Iном моментная характеристика М = f(Ia) имеет форму параболы. (рис. 8.61,б), так как электромагнитный момент
(8.89)
М = сМФÍa = сМkфIа2= C3Iа2,
где С3 — постоянная.
При Ia > Iном моментная характеристика линейная, так как
(8.90)
М = сМФIa = C'3Iа,
где C'3 — постоянная. Механические характеристики n = f(М) (рис. 8.62, а) можно построить на основании зависимостей n = f(Ia) и М = f(Ia). При Ia < (0,8 ÷ 0,9) Iном частота вращения изменяется по закону
(8.91)
n = |
U |
- |
∑Ra |
= C4 |
U |
- C2, |
ce kф√M/(cм kф ) |
ce kф |
√M |
где С4 — постоянная.
При Ia > Iном зависимость n = f(М) становится линейной.
|
Рис. 8.62. Механические и рабочие характеристики двигателя с последовательным возбуждением |
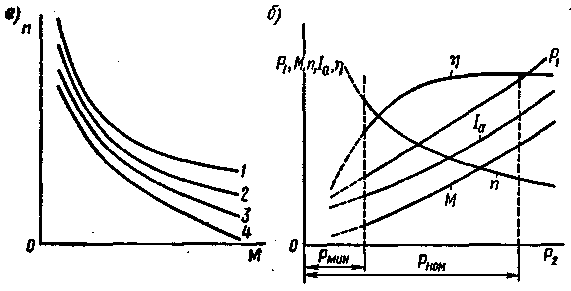
Включая в цепь якоря пусковые реостаты с сопротивлениями Rп1, Rп2 и Rп3 кроме естественной характеристики 1 можно получить семейство реостатных характеристик 2, 3 и 4, причем, чем больше Rп , тем ниже располагается характеристика.
Рабочие характеристики двигателя с последовательным возбуждением приведены на рис. 8.62, б. Зависимости n = f(Р2) М = f(Р2) являются нелинейными; зависимости P1 = f(Р2), Iа = f(Р2)и η = f(Р2) имеют примерно такой же характер, как и у двигателя с параллельным возбуждением.
Из рассмотрения рис. 8.62, а следует, что механические характеристики рассматриваемого двигателя (естественная и реостатные) являются мягкими и имеют гиперболический характер. При малых нагрузках частота вращения и резко возрастает и может превысить максимально допустимое значение (двигатель идет в «разнос»). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода или при небольшой нагрузке (различные станки, транспортеры и пр.). Обычно минимально допустимая нагрузка составляет (0,2 ÷ 0,25) Iном ; только двигатели малой мощности (десятки ватт) используют для работы в устройствах, где возможен холостой ход. Чтобы предотвратить возможность работы двигателя без нагрузки, его соединяют с приводным механизмом жестко (зубчатой передачей или глухой муфтой); применение ременной передачи или фрикционной муфты для включения недопустимо.
Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют в различных электрических приводах, особенно там, где имеется изменение нагрузочного момента в широких пределах и тяжелые условия пуска (грузоподъемные и поворотные механизмы, тяговый привод и пр.). Это объясняется тем, что мягкая характеристика рассматриваемого двигателя более благоприятна для указанных условий работы, чем жесткая характеристика двигателя с параллельным возбуждением. При жесткой характеристике частота вращения п почти не зависит от момента М, поэтому мощность
(8.92)
Р2 = Мω = 2πnМ/60 = С5М,
где С5 — постоянная.
При мягкой характеристике двигателя с последовательным возбуждением частота вращения и обратно пропорциональна √М, вследствие чего
(8.93)
Р2 = Мω = 2πnМ/60 = С'5√М,
где С5 — постоянная.
Поэтому при изменении нагрузочного момента в широких пределах мощность Р2, а следовательно, мощность Р1 и ток Iа у двигателей с последовательным возбуждением изменяются в меньших пределах, чем у двигателей с параллельным возбуждением; кроме того, они лучше переносят перегрузки. Например, при заданной кратности перегрузки по моменту М/Мном = kм ток якоря в двигателе с параллельным возбуждением увеличивается в kм раз, а в двигателе с последовательным возбуждением — только в √kм раз. Поэтому двигатель с последовательным возбуждением развивает больший пусковой момент, так как при заданной кратности пускового тока Iп/Iном = ki пусковой момент его Мп = ki2Мном , а у двигателя с параллельным возбуждением Мп= kiМном .
Указанные преимущества двигателей с последовательным возбуждением наиболее четко проявляются в простых приводах, не имеющих систем автоматического управления. При наличии таких систем предпочтение всегда отдается двига¬телям с параллельным или независимым возбуждением, у. которых с помощью регуляторов тока возбуждения можно получить требуемую форму механической характеристики, например гиперболическую.
4. Концевые выключатели являются электромеханическими аппаратами, которые предназначены для автоматического отключения привода механизма при достижении им крайних установленных положений. Будучи связанными с механизмом передвижения, они выключат его при подходе крана к упору рельсовых крановых путей, на механизме изменения вылета – при достижении стрелой наибольшего и наименьшего вылетов, на механизме подъема груза концевые выключатели играют роль ограничителя высоты подъема, отключая лебедку при подходе грузозахватного приспособления к головке стрелы. Кроме этого, концевые выключатели могут входить в конструкцию каких-либо крановых устройств, как это имеет место в дифференциальном механизме грейферных лебедок, в ограничителях массы груза, в противоугонных устройствах и т.д. Из многочисленных конструкций концевых выключателей рассмотрим рычажные и винтовые, поскольку они получили наибольшее распространение. Рычажный выключатель (рис. 88,а) состоит из корпуса, внутри которого на оси 4 находятся кулачки 5. Они могут постоянно замыкать контакты 3 или удерживать их в разомкнутом состоянии, или часть контактов может быть разомкнута, а часть – замкнута. Это зависит от той функции, которую должен выполнять концевой выключатель. На оси закреплен рычаг 2 с роликом 1. при отклонении рычага при наезде на упор происходит поворот кулачков, что ведет к размыканию (замыканию) контактов и воздействию на цепь управления механизмом или устройством (рис. 88,б). Простейшим ограничителем хода крана (рис. 88,в) может быть рычажный выключатель 6, установленный на тележке, и односкосный клин 7 (линейка), расположенный у концевых участков рельсовых путей. При движении машины по направлению стрелки ролик выключателя наезжая на линейку, отклонит рычаг, что приведет к размыканию контакта питания электродвигателя механизма передвижения. Второй контакт выключателя остается замкнутым, что позволяет крану передвигаться в обратном направлении при соответствующем переключении контроллера крановщиком. Рычажный выключатель можно использовать для ограничения высоты подъема груза, например в варианте, изображенном на рис. 88,г. Это устройство размещают на головке стрелы. На ось 9 выключателя вместо рычага с роликом насаживают двуплечий рычаг 10. На одном его плече помещают противовес 8, а к другому на канате 11 подвешивают груз 12. при достижении крайнего верхнего положения крюковая подвеска 13 своим ходом поднимает груз. Это нарушает равновесие системы, и противовес опускается, что ведет к повороту оси выключателя и размыканию цепи питания электродвигателя механизма подъема груза. На другом принципе работает концевой выключатель винтового типа (рис.88,д). Он состоит из винта 14, получающего вращение от механизма, который он обслуживает, посредством зубчатой 17 или цепной передачи. На винте находится гайка 15. При работе механизма вращение винта заставляет гайку двигаться вдоль него в направляющих 16. Ход гайки рассчитан так, что при достижении механизмом одного установленного предела она своим движением нажмет на рычаг 18, разомкнет мостиковые контакты 20, и механизм выключится. При реверсировании механизма гайка движется в обратном направлении. Тогда пружина 19 возвратит рычаг в исходное положение, и ранее разомкнутый контакт замкнется. При достижении гайкой противоположно расположенного рычага механизм снова выключится, и это будет соответствовать его второму установленному пределу.
5. Возможны два режима электрического торможения: динамическое торможение и торможение противовключением. Рекуперативное торможение осуществить не возможно, так как э.д.с. вращения Е не может быть больше напряжения якорного источника U.Динамическое торможение осуществляется двумя способами: с самовозбуждением и с независимым возбуждением. Схема включения двигателя и механические характеристики для первого случая приведены на рис. 2.10.
б) характеристики двигателя в режиме динамического торможения с самовозбуждением.
Двигатель отключен от напряжения источника, а обмотка возбуждения переключена таким образом, чтобы направление тока IВ в ней было таким же как а в двигательном режиме (см. рис. 2.8). Это сохранение направления тока исключает уничтожение малого остаточного потока, связанного с намагничиванием статора двигателя. Этот поток и является причиной самовозбуждения: в обмотке якоря, вращающегося под действием инерционных сил в прежнем направлении, наводится э.д.с. Е, направление которой такое же, как и в двигательном режиме. Под действием Е в контуре динамического торможения появляется ток, что приводит к увеличению потока Ф, э.д.с. Е и тока IЯ. Поскольку ток IЯ по отношению к двигательному режиму имеет противоположное направление, момент двигателя становится тормозным. Двигатель из точки А в первом квадранте переходит в точку В или С на характеристике динамического торможения во втором квадранте. Вначале процесс самовозбуждения проходит очень интенсивно и это приводит к броску тормозного момента, способного вызвать удары в механической части привода. Поэтому чаще применяют динамическое торможение с независимым возбуждением.
торможения с независимым возбуждением.Зажимы якоря двигателя закорачиваются на сопротивление динамического торможения RДТ, а обмотка возбуждения подключается к напряжению источника через сопротивление RВ. Ток в ней направлен как и в двигательном режиме и устанавливается равным номинальному. Характеристики аналогичны характеристикам ДПТ с независимым возбуждением: они линейны, расположены во втором квадранте и проходят через начало координат.
Билет 6
О б л а с т ь п р и м е н е н и я. Наиболее широко эти двигатели применяются в электротяге (магистральный, городской и внутризаводской электро-транспорт), а также для электропривода грузоподъемных механизмов, особенно для электропривода подъемных лебедок специальных кранов в металлургических цехах. Область применения определяется рядом преимуществ, присущих этим типам двигателей.
П р е и м у щ е с т в а. Двигатели с последовательным возбуждением требуют меньшего числа троллеев для подвода электропитания, характерный пример этого - электроприводы трамваев и троллейбусов. Двигатели с последовательным и смешанным возбуждением имеют большую (по сравнению с двигателями независимого возбуждения) перегрузочную способность по моменту, эти двигатели более надежны (особенно двигатели последовательного возбуждения, имеющие малое межвитковое напряжение в обмотке возбуждения), не боятся снижения напряжения в питающей сети. При применении рассматриваемых двигателей для электроприводов механизмов с резкими пиками нагрузки мягкость механической характеристики (особенно в области малых нагрузок) обеспечит таким приводам преимущество. При пике нагрузки двигатель автоматически снижает скорость, разряжая запас кинетической энергии на вал рабочей машины. При этом ограничивается величина толчков тока в якоре. Малые грузы поднимаются с большей скоростью, а большие - с малой скоростью. Причем это производится автоматически за счет специфики механических характеристик, а не за счет сложных регулирующих устройств.
Н е д о с т а т к и. Двигатели со смешанным и последовательным возбуждением (особенно последние) нельзя включать в сеть вхолостую или с малой статической нагрузкой, так как скорость их в этих случаях превысит допустимые значения, и наступит «разнос» двигателя, сопровождающийся повреждением бандажей и обмоток под действием центробежных усилий.
Двигатели с последовательным и смешанным возбуждением имеют большую стоимость по сравнению с двигателями независимого возбуждения той же мощности и скорости. Это объясняется большим расходом активных материалов (железа и меди) для обеспечения большей перегрузочной способности по току и моменту.
2.
Асинхронные
электродвигатели (АД)
находят в народном хозяйстве широкое
применение. По разным данным до 70% всей
электрической энергии, преобразуемой
в механическую энергию вращательного
или поступательного движения, потребляется
асинхронным двигателем. Электрическую
энергию в механическую энергию
поступательного движения преобразуют
линейные асинхронные электродвигатели,
которые широко используются в электрической
тяге, для выполнения технологических
операций. Широкое применение АД связано
с рядом их достоинств. Асинхронные
двигатели -
это самые простые в конструктивном
отношении и в изготовлении, надежные и
самые дешевые из всех типов электрических
двигателей. Они не имеют щеточноколлекторного
узла либо узла скользящего токосъема,
что помимо высокой надежности обеспечивает
минимальные эксплуатационные расходы.
В зависимости от числа питающих фаз
различают трехфазные и однофазные
асинхронные двигатели.Трехфазный
асинхронный двигатель при
определенных условиях может успешно
выполнять свои функции и при питании
от однофазной сети. АД широко применяются
не только в промышленности, строительстве,
сельском хозяйстве, но и в частном
секторе, в быту, в домашних мастерских,
на садовых участках.Однофазные
асинхронные двигатели приводят
во вращение стиральные машины, вентиляторы,
небольшие деревообрабатывающие станки,
электрические инструменты, насосы для
подачи воды. Чаще всего для ремонта или
создания механизмов и устройств
промышленного изготовления или
собственной конструкции применяют
трехфазные АД. Причем в распоряжении
конструктора может быть как трехфазная,
так и однофазная сеть. Возникают проблемы
расчета мощности и выбора двигателя
для того или другого случая, выбора
наиболее рациональной схемы управления
асинхронным двигателем, расчета
конденсаторов, обеспечивающих работу
трехфазного асинхронного двигателя в
однофазном режиме, выбора сечения и
типа проводов, аппаратов управления и
защиты. Такого рода практическим
проблемам посвящена предлагаемая
вниманию читателя книга. В книге
приводится также описание устройства
и принципа действия асинхронного
двигателя, основные расчетные соотношения
для двигателей в трехфазном и однофазном
режимах.
Устройство
и принцип действия асинхронных
электродвигателей
1.
Устройство
трехфазных асинхронных двигателей
Трехфазный
асинхронный двигатель (АД)
традиционного исполнения, обеспечивающий
вращательное движение, представляет
собой электрическую машину, состоящую
из двух основных частей: неподвижного
статора и ротора, вращающегося на валу
двигателя. Статор двигателя состоит из
станины, в которую впрессовывают так
называемое электромагнитное ядро
статора, включающее магнитопровод и
трехфазную распределенную обмотку
статора. Назначение ядра - намагничивание
машины или создание вращающегося
магнитного поля. Магнитопровод статора
состоит из тонких (от 0,28 до 1 Мм)
изолированных друг от друга листов,
штампованных из специальной
электротехнической стали. В листах
различают зубцовую зону и ярмо (рис.
1.а). Листы собирают и скрепляют таким
образом, что в магнитопроводе формируются
зубцы и пазы статора (рис. 1.б). Магнитопровод
представляет собой малое магнитное
сопротивление для магнитного потока,
создаваемого обмоткой статора, и
благодаря явлению намагничивания этот
поток усиливает.
 Рис.
1 Магнитопровод
статора
В
пазы магнитопровода укладывается
распределенная трехфазная обмотка
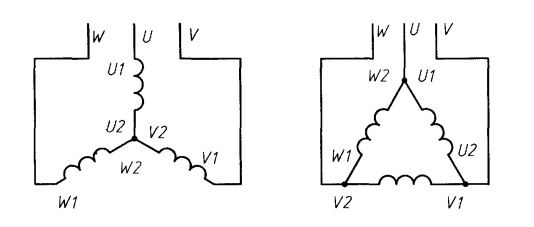
статора. Обмотка в простейшем случае
состоит из трех фазных катушек, оси
которых сдвинуты в пространстве по
отношению друг к другу на 120°. Фазные
катушки соединяют между собой по схемам
звезда, либо треугольник (рис. 2).
Рис.
1 Магнитопровод
статора
В
пазы магнитопровода укладывается
распределенная трехфазная обмотка
статора. Обмотка в простейшем случае
состоит из трех фазных катушек, оси
которых сдвинуты в пространстве по
отношению друг к другу на 120°. Фазные
катушки соединяют между собой по схемам
звезда, либо треугольник (рис. 2).
3.
Номинальное напряжение по изоляции, В: |
660 |
Номинальный ток главной цепи, А: |
10 |
Номинальное напряжение втягивающей катушки при частоте 50 Гц, В: |
24; 36; 40; 48; 110; 127; 220; 230; 240; 380; 400; 415; 500; 660 |
Номинальное напряжение втягивающей катушки при частоте 60 Гц, В: |
110; 220; 380; 400; 415; 440 |
Количество вспомогательных контактов, замыкающих/размыкающих: |
1/- |
Мощность, потребляемая катушкой пускателя рабочая/пусковая, Вт: |
8/68 |
Максимальная частота включений без нагрузки/с нагрузкой, вкл. в час: |
3 600/2 400 |
Мощность двигателя для категории АС-3 при напряжении 380 В переменного тока, кВт: |
5,5 |
Электрическая износостойкость, циклов В-О: |
3 000 000 |
Механическая износостойкость, циклов В-О: |
20 000 000 |
Наличие теплового реле: |
есть (серии РТЛ-1) |
Способ крепления: |
винтовой (2 винта М5) |
Степень защиты: |
IP54 |
Габаритные размеры ШхДхВ, мм: |
87х116,5х160 |
Вес, кг: |
1,04 |
4. Для того чтобы исключить такие явления, необходимо, с одной стороны, обеспечить ограничение пускового тока двигателя, а с другой стороны, по возможности уменьшить время его разгона. Время разгона двигателя от момента его включения до момента, когда ротор достигает номинальной частоты вращения, определяется ускорением ротора во время пуска
(49)
tпуск = |
ωн |
. |
aср |
где ωн — номинальная угловая скорость двигателя, с-1; аср — среднее угловое ускорение во время пуска, с-2.
В свою очередь ускорение зависит от разности вращающего момента двигателя и момента сопротивления на его валу при постоянстве момента инерции:
(50)
Jа = Мвр - Мс ,
где Мвр — вращающий момент двигателя, Н-м; Мс — статический момент сопротивления на валу двигателя, Н∙м; J — момент инерции всех вращающихся частей, кг∙м2; а — угловое ускорение ротора, с-2.
Пуск может быть успешно проведен, если в течение всего времени разгона Мвр > Мс .
Из выражения (50) следует также, что при заданной величине момента сопротивления ускорение будет тем больше, чем больше величина вращающего момента двигателя. Соответственно при увеличении вращающего момента двигателя в режиме пуска сократится время его разгона. Таким образом, второе требование, которое должно выполняться во время пуска асинхронного двигателя, заключается в создании достаточно большого вращающего момента в этом режиме.
Необходимо, кроме того, иметь в виду, что в тяжелых условиях пуска при недостаточно большом вращающем моменте разгон двигателя вообще невозможно осуществить. Это произойдет в том случае, если момент сопротивления на валу окажется большим, чем вращающий момент двигателя.
Рассмотрим теперь, каким образом выполняются эти два основных требования, предъявляемых к пусковому режиму асинхронного двигателя. Прежде всего отметим, что характеристики асинхронных двигателей в режиме пуска в большой степени зависят от его конструкции. В двигателях с фазным ротором имеются хорошие возможности для регулирования величины пускового тока и пускового момента введением сопротивлений в цепь ротора двигателя. Однако они являются более дорогими и сложными в эксплуатации. Более дешевые и надежные двигатели с короткозамкнутым ротором не позволяют осуществлять такого регулирования и их пусковые характеристики значительно хуже.
Наиболее часто применяются следующие способы пуска асинхронных двигателей: прямое включение двигателей с короткозамкнутой обмоткой ротора; включение двигателя с понижением напряжения, подаваемого на обмотку статора; пуск в ход с введением сопротивления в фазную обмотку ротора.
Прямое включение асинхронного двигателя в сеть является наиболее простым способом пуска двигателя. В то же время в этом случае обмотки статора и ротора двигателя обтекаются большим пусковым током (током короткого замыкания), равным 4—7-кратному значению номинального. Поэтому очень важно, чтобы время пуска двигателя было при этом как можно меньшим.
Из всех способов пуска асинхронных двигателей с короткозамкнутой обмоткой ротора при данном способе пуска создается наибольший вращающий момент. Пусковой вращающий момент двигателя определяется при этом по формуле (48). Поскольку он все же относительно невелик, данный способ пуска применяется для приводов со средними и легкими условиями пуска. Отметим, что в настоящее время все большее распространение получают двигатели
|
Рис. 22. Схемы пуска асинхронного двигателя. а — при последовательном включении индуктивного сопротивления Др; б — при включении двигателя через автотрансформатор АТ. |

с глубоким пазом, которые имеют улучшенные пусковые характеристики. Обладая всеми преимуществами двигателей с короткозамкнутым ротором, они развивают больший пусковой момент при меньшем пусковом токе по сравнению с двигателями обычного исполнения. Это позволяет применять такие двигатели для приводов с более тяжелыми условиями пуска, т. е. со значительными статическими моментами при малых частотах вращения ротора. Необходимо также иметь в виду, что большой ток, потребляемый двигателем, проходит не только по его обмоткам, но и по проводам сети и трансформатору. Поэтому в питающей сети создается падение напряжения, которое в случае пуска мощного двигателя может оказаться весьма значительным. В результате напряжение, подводимое к двигателю в этом режиме, сильно понизится и это вызовет Дополнительное снижение вращающего момента двигателя. Поэтому прямое включение при пуске мощных Двигателей допустимо при наличии достаточно мощной сети, выдерживающей прохождение больших токов без значительного падения напряжения. В современных мощных системах производится прямое включение на сеть двигателей с номинальной мощностью в несколько сотен киловатт.
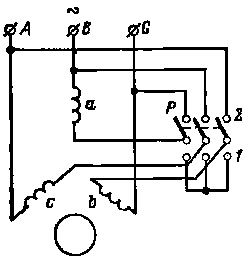
|
Рис. 23. Схема пуска двигателя с переключением обмоток со звезды на треугольник. |
Включение двигателя при пониженном напряжении питающей сети позволяет уменьшить пусковой ток, потребляемый двигателем. Однако в этом случае снижается и вращающий момент, развиваемый двигателем при пуске, причем это уменьшение происходит пропорционально квадрату подводимого к двигателю напряжения. Такой способ применяется для приводов с легкими условиями пуска.
Практически понижение напряжения достигается включением индуктивного сопротивления последовательно с обмоткой статора двигателя (рис. 22,а) или включением двигателя через автотрансформатор (рис. 22,б). При пуске по схеме на рис. 22,а вначале замыкают рубильник Р1, а затем, когда ротор достигает достаточной частоты вращения, замыкают рубильник Р2, включая двигатель на полное напряжение сети. При пуске с помощью автотрансформатора (рис. 22,б) вначале замыкается рубильник Р1, а затем рубильник Р2. Применение автотрансформатора позволяет ограничивать пусковой ток в питающей сети при меньшем снижении напряжения питающего двигатель, чем в случае включения индуктивного сопротивления. Следовательно, при этом в меньшей степени понижается пусковой момент двигателя.
К способам пуска с понижением напряжения можно отнести также пуск с переключением обмоток статора со звезды на треугольник (рис. 23). В режиме пуска переключатель Р находится в положении 1, причем обмотка статора включена по схеме звезды. После того как ротор достигает установившейся частоты вращения, переключатель необходимо перевести в положение 2 и обмотки статора будут включены по схеме треугольника.
|
Рис. 24. Схемы асинхронных двигателей с введением сопротивлений-резисторов в цепь статора (а) и в цепь ротора (б). |
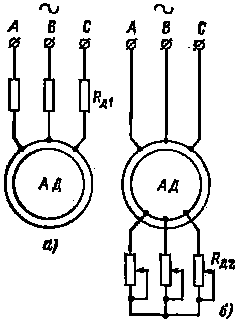
При данном способе пуска фактически понижается величина напряжения, подводимого к каждой фазе двигателя, поскольку при одинаковом напряжении в линии напряжение на фазу в схеме звезды в √3 раз меньше, чем в схеме треугольника. Пусковой ток в сети при соединении обмотки статора звездой понижается в 3 раза по сравнению с соединением статора треугольником. Однако в 3 раза понижается также пусковой момент.
Для приводов с наиболее тяжелыми условиями пуска следует использовать двигатели с фазной обмоткой ротора. Введение сопротивления в цепь роторапозволяет, с одной стороны. ограничить пусковой ток двигателя, а с другой стороны — повысить пусковой момент. Схема включения сопротивлений (резисторов) в цепь ротора двигателя изображена на рис. 24,б.
Подставляя sмакс = 1 в формулу (45), можно найти величину дополнительного сопротивления в цепи ротора, при котором пусковой момент для данной характеристики оказывается равным максимальному моменту,
(51)
r'д = x1 - r'2 + х'2.
Последовательно изменяя по мере увеличения частоты вращения двигателя сопротивление в цепи ротора, можно добиться того, чтобы весь процесс пуска проходил при вращающем моменте, близком к максимальному. Это позволяет получить возможно меньшее время пуска двигателя.
5.
Дополнительные возможности управлять координатами асинхронного электропривода появляются, если ротор выполнен не короткозамкнутым, а фазным, т.е. если его обмотка состоит из катушек, похожих на статорные, соединенных между собой и выведенных на кольца, по которым скользят щетки, связанные с внешними устройствами. Схематически трехфазная машина с фазным ротором показана на рис. 10,а. Фазный ротор обеспечивает дополнительный канал, по которому можно воздействовать на двигатель, - в этом его очевидное достоинство, но очевидна и плата за него: существенное усложнение конструкции, бo льшая стоимость, наличие скользящих контактов. Именно эти негативные особенности привели к тому, что в общем объёме производства асинхронные двигатели с фазным ротором составляют небольшую долю.
|
|
|
|

а) б) в) г)
Рис. 10. Асинхронный двигатель с фазным ротором (а), схема (б) и характеристики (в) и (г) реостатного регулирования
К щеткам на кольцах в цепи ротора можно подключать как пассивные цепи, например, резисторы, так и активные, содержащие источники энергии; последняя возможность широко используется в электроприводах большой мощности (сотни - тысячи киловатт).
Реостатное регулирование.
Как и в электроприводе постоянного тока это простейший способ регулирования: в каждую фазу ротора включают одинаковые резисторы с сопротивлением Rд - рис. 10,б. Тогда общее активное сопротивление фазы ротора составит R2 = Rр + Rд, а искусственные характеристики приобретут вид, представленный на рис. 10,в,г: предельное значение тока ротора Iў 2 пред и критический момент Мк в соответствии с (8) и (11) не изменяется, а sк в соответствии с (12) растет пропорционально R2:
 .
(18)
.
(18)
Последнее соотношение для критического скольжения, очевидно, выполняется и для скольжения при любом М = const, оно похоже на (3.16), а реостатные механические характеристики похожи на таковые для двигателя постоянного тока. Показатели реостатного регулирования скорости асинхронных двигателей с фазным ротором практически те же, что у электропривода постоянного тока.
1. Регулирование однозонное - вниз от основной скорости.
2. Диапазон регулирования (2-3):1, стабильность скорости низкая.
3. Регулирование ступенчатое. С целью устранения этого недостатка иногда используются схемы, в которых роторный ток выпрямляется и сглаживается реактором, а резистор, включаемый за выпрямителем, шунтируется управляемым ключом - транзистором с управляемой скважностью, благодаря чему достигается плавность регулирования, а при использовании обратных связей формируются жесткие характеристики.
4. Допустимая нагрузка Мдоп = Мн, поскольку Ф ” Фн и при мало меняющемся cos j 2 I2доп ” I2н .
5. С энергетической точки зрения реостатное регулирование в асинхронном электроприводе столь же неэффективно, как и в электроприводе постоянного тока - потери в роторной цепи при M = const пропорциональны скольжению:
![]() ,
,
а
распределение этих потерь определяется
в соответствии с (18) соотношением
сопротивлений - собственно в роторной
обмотке рассеивается мощность  ,
а в дополнительных резисторах - мощность
,
а в дополнительных резисторах - мощность  .
.
6. Капитальные затраты, как и в электроприводе постоянного тока, сравнительно невелики.
Билет 7
1 Частотное управление. У трехфазных асинхронных двигателей наиболее перспективным способомплавного регулирования является изменение частоты напряжения питания f (cм.(3.7)).При этом следует иметь в виду, что для наилучшего использования двигателя изменение частоты должно сопровождаться изменением амплитуды напряжения питания U. Объясняется это тем, что при неизменной амплитуде напряжения и регулировании частоты изменяется магнитный поток машины Фм=U/(4,44fw1.эф). Уменьшение f вызовет увеличение Фм, что может привести к насыщению магнитопровода, резкому возрастанию намагничивающего тока и перегреву как стали, так и обмоток статора. Увеличе¬ние f приводит к уменьшению Фм, что при Мст=const вызовет рост тока в роторе и, соответственно, перегрев ротора при недоиспользовании стали.
Закон изменения напряжения зависит от изменения частоты питания и характера нагрузки. Например, если статический момент нагрузки Мст не зависит от скорости, то необходимо при регулировании частоты f так изменять напряжение U, чтобы
U /f = const. (3.8)
При этом в широком диапазоне сохраняется перегрузочная способность двигателя Мmax / Мном.
Частотный способ позволяет устанавливать угловую скорость выше и ниже номинальной. Увеличение угловой скорости допускается (в основном из условий механической прочности) в 1,5-2 раза больше номинальной. Нижний предел скорости ограничен тем, что технически сложно получить источники питания с низкой частотой, а также добиться достаточно равномерного вращения ротора двигателя. В разомкнутом приводе частотный способ управления позволяет изменять угловую скорость в диапазоне D = (20 - 30):1; в замкнутом приводе диапазон может быть существенно расширен с помощью обратных связей по скорости, току и напряжению.
Препятствием для широкого внедрения частотного способа является сложность и весьма высокая стоимость полупроводниковых преобразователей частоты. Схема и алгоритмы управления таким приводом получаются более сложными, чем приводом посто¬янного тока, так как управлять приходится сразу двумя взаимосвязанными величинами: частотой напряжения и магнитным потоком - при существенно нелинейных характеристиках.
Однако асинхронные двигатели с короткозамкнутым ротором благодаря отсутствию скользящего контакта являются более надежными и требуют меньше ухода в эксплуатации, чем коллекторные двигатели постоянного тока. При одинаковой мощности их стоимость в несколько раз меньше. Поэтому создание регулируемых асинхронных приводов с частотным управлением в целом ряде случаев является перспективным.
Система «Преобразователь частоты – трехфазный асинхронный двигатель»(ПЧ–АД).Силовые преобразователи частоты и амплитуды напряжения для частотного управления асинхронными двигателями выполняются в настоящее время на силовых полупроводниковых элементах. Преобразователи частоты можно разделить на две основные группы: преобразователи с промежуточным звеном постоянного тока и преобразователи с непосредственной связью первичной и вторичной цепей.
Широкое распространение получили преобразователи с промежуточным звеном постоянного тока (рис.3.6). В рассматриваемых преобразователях переменное напряжение питающей сети выпрямляется, фильтруется и подается на управляемый инвертор, который преобразует постоянное напряжение в переменное с регулируемой частотой. Выпрямители преобразователей в свою очередь могут быть управляемые и неуправляемые.
В преобразователе частоты (ПЧ) с управляемым выпрямителем УВ (рис. 3.6,а) напряжение U1~, подаваемое на двигатель АД, регулируется по амплитуде за счет изменения напряжения постоянного тока U? на выходе УВ. Управляемый выпрямитель преобразователей частоты по схеме и принципу действия не отличается от УВ, применяемых в электроприводе постоянного тока (см. §2.2).Управление работой выпрямителя и управляемого инвертора УИ осуществляет блок управления БУ.
Рис.3.6
Принцип действия управляемого инвертора рассмотрим на примере инвертора, выполненного по трехфазной мостовой схеме и работающего на чисто активную нагрузку (рис. 3.7,а). В управляемом инверторе силовыми элементами должны быть полностью управляемые полупроводниковые приборы, т.е. способные открываться и закрываться под воздействием соответствующих сигналов управления. Этому требованию отвечают либо транзисторы, работающие в ключевом режиме, либо тиристоры в совокупности со схемой искусственной коммутации (см. §2.3), либо запираемые тиристоры. В общем виде эти силовые элементы обозначены на рисунке как ключи К1-К6. На вход УИ подано напряжение постоянного тока U, переключение в схеме происходит по команде блока управления каждую часть периода требуемой выходной частоты. При этом каждый ключ замкнут либо периода выходной частоты, либо периода. На рис. 3.7,б в качестве примера показаны временные диаграммы формирования выходного напряжения в фазах А, В, С сопротивления нагрузки Rн для первого случая.

Рис.3.7
Как видно, на каждом такте коммутации схемы одновременно проводят ток три ключа (во втором случае – два ключа). Например, на первом такте открыты ключи с номерами 1, 2, 3 и ток протекает по цепи, в которой последовательно с сопротивлением фазы С включены параллельно соединенные сопротивления фаз А и В. При этом в фазе С падает приложенного напряжения U, в фазах А и В – по U. Знак падения напряжения определяется направлением тока в фазе. За положительное падение напряжения принято такое, которое создается током, протекающим к общей точке фаз нагрузки. По мере переключения ключей напряжение в фазах ступенчато изменяется и на нагрузке формируется симметричная трехфазная система напряжений прямоугольно-ступенчатой формы. Первые гармоники этих напряжений требуемой частоты (пунктирные линии на рис. 3.6,б) имеют фазовый сдвиг 120°. Высшие гармоники могут быть отфильтрованы LC-фильтрами. Частота выходного напряжения определяется частотой коммутации ключей, порядок следования напряжений – порядком коммутации ключей.
При активной нагрузке, показанной на рис. 3.7,а, по закону изменения напряжения будут изменяться и токи. Однако обмотки статора асинхронного двигателя являются для инвертора активно-индуктивной нагрузкой и закон изменения выходного тока инвертора не будет совпадать с законом изменения напряжения. Это обстоятельство предъявляет определенные требования к схемам инверторов.
В преобразователе частоты с неуправляемым выпрямителем НВ (рис.3.6,б) выпрямленное напряжение преобразуется с помощью транзисторного широтно-импульсного модулятора (ШИМ) в импульсное напряжение на входе инвертора, частота импульсов должна быть значительно больше верхнего предела рабочей частоты на выходе инвертора.
При обычной широтно-импульсной модуляции каждый силовой ключ инвертора (рис.3.7,а) включается и отключается не один раз за такт формируемого выходного напряжения (рис.3.7,б), а несколько. Среднее значение напряжения на такте в режиме непрерывного тока (см.§2.3) примерно равно ε – относительной продолжительности импульсов ШИМ. Изменяя ε , можно регулировать значение напряжения U1~ на выходе инвертора. Способ близок по обеспечению синусоидальной формы выходного напряжения к системе УВ – АД ,но лучше него по энергетическим характеристикам во всем диапазоне регулирования частоты и напряжения.
Более перспективным является синусный способ широтно-импульсного регулирования, который заключается в том, что длительность открытого состояния силовых ключей не остается постоянной в течение полупериода выходной частоты, а изменяется по синусоидальному закону. Если при этом частота переключения силовых ключей существенно выше выходной частоты инвертора, то в выходном напряжении кроме основной гармоники присутствуют лишь гармоники весьма высокого порядка, которые отфильтровываются индуктивностями обмоток самого двигателя.
Блок управления преобразователем частоты состоит из схемы управления выпрямителем, схемы управления инвертором и схемы совместного управления. Блок управления позволяет получать требуемые характеристики асинхронного электропривода при частотном управлении. Наиболее типичными законами автоматического управления являются:
1. Частотное управление, при котором изменение частоты сопровождается нелинейным изменением напряжения статора; в схеме управления требуется применение функционального преобразователя координат;
2. Частотно-токовое управление, при котором изменение частоты сопровождается нелинейным изменением тока статора; в схеме управления требуется применение функционального преобразователя координат;
3. Векторное управление, основанное на непосредственном контроле значения и положения магнитного потока в воздушном зазоре машины или положения ротора, а также мгновенных значений токов статора; в схеме управления требуется целый ряд блоков векторного преобразования координат.
2. автоматы защиты по трехфазной сети.выбор и обоснование основных параметров
трехфазные электродвигатели при случайном отключении одной из фаз быстро перегреваются и выходят из строя, если их вовремя не отключить от сети. Для этой цели разработаны различные системы автоматических защитных отключающих устройств, однако, они либо сложны, либо недостаточно чувствительны.
Устройства защиты можно условно разделить на релейные и диодно-транзисторные. Релейные в отличие от диодно-транзисторных более просты в изготовлении.
Рассмотрим несколько релейных схем автоматической защиты трехфазного двигателя при случайном отключении одной из фаз питания электрической сети.