

4.4 Параллельный порт компьютера
4.4.1 Параллельный порт и его история
Когда компания IBM создала первый персональный компьютер (привод флоппи диска на 160 килобайт, 64 килобайта оперативной памяти RAM), она предусмотрела интерфейс для подключения принтера используя 25-ти кондукторный кабель. Это был прародитель параллельного порта, который сейчас есть на большинстве компьютеров. Так как это очень простой способ передачи данных, он использовался не только для подключения принтера, но и для многих других задач. Вы можете передавать данные между компьютерами, подключать периферийные устройства, такие как сканеры и ZIP-приводы, и конечно же использовать его для управления станком. Так как большинство этих функций в наше время взял на себя USB порт, то параллельный порт теперь свободен для его использования в Mach3.
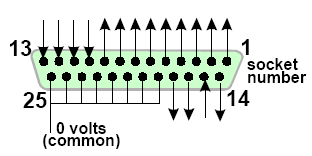
Рисунок 4.1 – Коннектор парралельного порта «мама»
(находится на задней панели компьютера)
Коннектор представляет собой D-образный коннектор, содержащий 25 отверстий/ножек. Он находится на задней панели компьютера, и выглядит как показано на рисунке 4.1 Стрелочки показывают направление движения информации относительно компьютера. Так, например, 15-тая ножка это ввод.
Заметка: Кабели-переходники с USB на коннектор 25 не подходят для подключения станка, несмотря на то, что с более простыми задачами, такими как подключение принтера, они справляются отлично.
4.4.2 Логические сигналы
При первом прочтении можно пропустить этот раздел, и вернуться к нему если у вас возникнут какие-либо осложнения. Полезно будет прочитать его, имея под рукой документацию к электронным приводам осей.
Все входящие и выходящие из Mach3 сигналы являются цифровыми двоичными (т.е. нули и единицы). Напряжение для этих сигналов поддерживается ножками ввода и вывода параллельного порта. Эти напряжения измеряются относительно к 0 вольт компьютера (подсоединяются к ножкам с 18 по 25 порта).
Самыми первыми из используемых интегральных схем (серия 74хх) были TTL (логика транзистор-транзистор). В схемах TTL любое напряжение между 0 и 0.8 вольт называется “lo” (низким) а любое между 2.4 и 5 вольт – “hi” (высоким). Подключение отрицательного напряжения или чего-либо более 5 вольт вызовет дым¹. Параллельный порт был создан на основе TTL, и по сей день эти напряжения определяют сигналы “lo” и “hi”. Обратите внимание, что в худшем случае различие между ними составляет всего лишь 1.6 вольт.
Конечно это ****** говорить что “lo” представляет собой логический ноль или логическую единицу. Однако, как объясняется ниже, обозначать “lo” как единицу целесообразнее в большинстве практических интерфейсных схем.
Для того чтобы сигнал вывода что-либо сделал, некоторый ток должен пройти по подключенной цепи. Когда это “hi”, ток пройдет по направлению из компьютера. Когда “lo”, ток пройдет по направлению в компьютер. Чем больше тока будет двигаться по направлению внутрь, тем сложнее держать его напряжение близко к нулю, и тем ближе к разрешенному пределу в 0.8 вольт будет находиться “lo”. Одновременно, исходящий ток “hi” понизит напряжение и приблизит его к пределу в 2.4 вольт. Так что при большом количестве перемещающегося тока, разница между “lo” и “hi” будет даже меньше чем 1.6 вольт, и сделает систему ненадежной. Наконец, допускается в 20 раз больше тока входящего в “lo” чем исходящего из “hi”.
Это означает, что лучше назначить логическую единицу “lo” сигналом. Очевидно, что этот метод назвали логикой активной lo. Главный практический недостаток состоит в том, что устройство, подключенное к параллельному порту, должно иметь питание 5 вольт. Иногда оно берется из компьютерного игрового порта или из источника питания подключенного устройства.
При переключении к сигналам входа, компьютеру понадобится определенное количество тока (меньше 40 микроампер) для “hi” вводов, и некоторое количество он обеспечит сам (меньше 0.4 миллиампер) для вводов “lo”.
Так как материнские платы современных компьютеров имеют множество встроенных возможностей, включая и параллельный порт, мы испытывали системы, где напряжение подчиняется только правилам “lo” и “hi”. Можно заметить, что станок, который запускался на старой системе, может начать «капризничать» после апгрейда. Похоже что ножки с 2 по 9 имеют сходные свойства (они являются ножками передачи данных при печати). Ножка 1 также важна при печати, но остальные ножки выводов мало используются, и могут быть недостаточно мощными в случае чрезмерной оптимизации при разработке. Хорошая isolating breakout board (смотри следующий раздел) защитит вас от подобных проблем электронной совместимости.
_____________________________________________________________________________
¹Некоторые люди считают, что эти интегрированные схемы каким-то образом работают с использованием дыма. На самом же деле никто еще не видел чтобы плата заработала после того как она задымилась.
4.4.3 Электрический шум и дорогой дым.
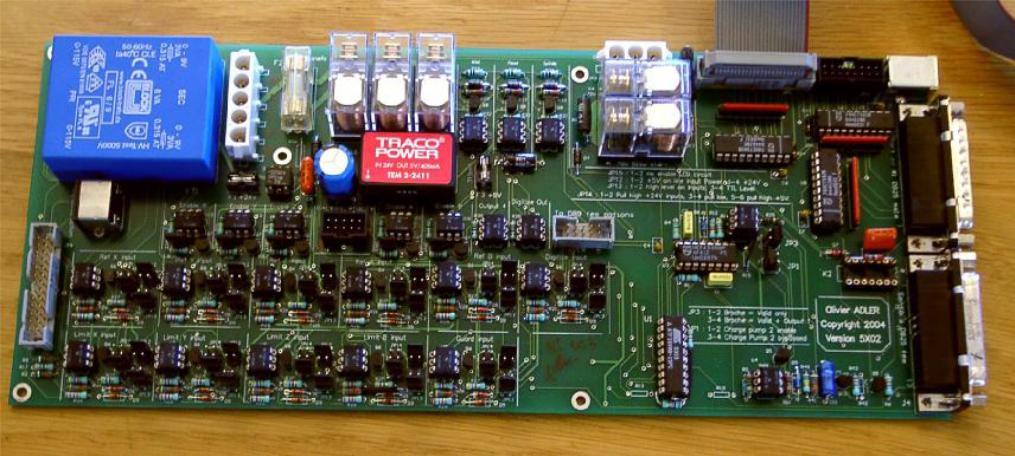

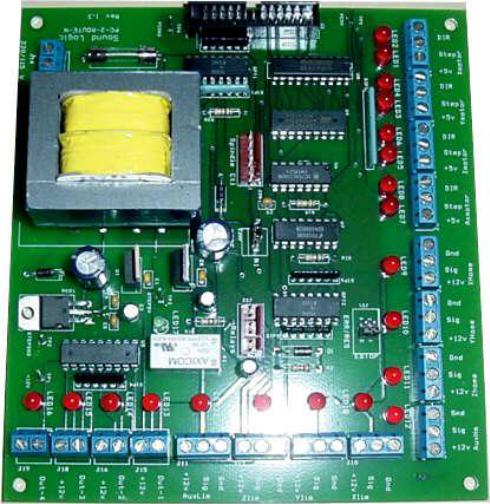
Figure 4.2 – Three examples of commercially
available breakout boards
Даже если вы пропустили предыдущую часть, эту вам следует прочитать!
Вы могли заметить, что ножки с 18 по 25 подключены к 0 вольт части питания компьютера. Все сигналы внутри и снаружи компьютера родственны этому. Если вы подключите к нему много длинных проводов, особенно если они проходят рядом с проводами, обеспечивающими высокое напряжение на двигателях, то они получат входящий ток, который потом создаст напряжения, которые похожи на шумы и могут создать ошибки. Таким образом можно даже испортить компьютер.
Приводы осей и, возможно, шпинделя, которые вы подключите к Mach3 через параллельный порт, скорее всего будут работать на напряжении между 30 и 240 вольт и смогут обеспечивать ток, силой во множество ампер. Правильно подключенные, они не причинят вреда компьютеру, но случайное короткое замыкание может сжечь материнскую плату компьютера и в некоторых случаях даже CD-ROM и жесткие диски.
По этим двум причинам строго рекомендуется приобрести устройство, называемое “isolating breakout board”. Это обеспечит вас легко подключаемыми терминалами, отдельным 0 вольт (общее) для всех приводов, переключателей начального положения и т.д. и позволит избежать превышения разрешенного тока на входах и выходах порта. Эта breakout board, электроника ваших приводов и элементы питания должны быть аккуратно помещены в металлические корпуса чтобы понизить риск создания помех для радио и телевизионных сигналов у ваших соседей. Если же вы построите “rat’s nest” (крысиное гнездо), риск короткого замыкания, и вследствие трагедии, повышается. На рисунке 4.2 показаны три доступных на рынке breakout boards.