

5.5.3.1 Инерция и силы
Ни один двигатель не способен моментально изменить скорость механизма. Torque необходим для задания углового момента вращающимся частям (включая и сам двигатель) и torque превращенный механизмом (винт и т.д.) в силу должен давать ускорение частям станка и инструменту или рабочей области. Некоторое количество силы тратится также на преодоление трения и собственно для того, чтобы заставить инструмент работать (резать).
Mach3 будет ускорять (и замедлять) двигатель с заданным уровнем. Если двигатель обеспечивает больше torque чем необходимо для работы (резки), преодоления трения и инерции на заданном уровне ускорения, тогда все в порядке. Если же torque не хватает, тогда либо двигатель заглохнет (если шаговый) либо повысится погрешность позиции серводвигателя. Если погрешность станет слишком высокой, тогда привод возможно сообщит о неисправности, но даже если и не сообщит то точность резки всеравно пострадает. Далее это будет объяснено более детально.
5.5.3.2 Тестирование разных значений ускорения
Попробуйте запустить и остановить станок с разными настройками бегунка Ускорения в окне Настройки Двигателя. При низком значении вы сможете услышать как увеличивается и понижается скорость.
5.5.3.3 Почему стоит избегать серьезных ошибок серводвигателя
Большинство перемещений, указанных в подпрограмме подразумевают одновременное движение двух и более осей. Так при движении из X=0, Y=0 в X=2, Y=1 Mach3 переместит ось Х вдвое быстрей чем ось Y. Это не только координирует движения на постоянной скорости но также гарантирует что при ускорении и замедлении применяется необходимая скорость, но ускорение всех движений производится на скорости, определенной самой медленной осью.
Если для данной оси вы выберете слишком высокое значение ускорения, Mach3 будет полагать что это значение может использоваться, но так как на практике ось задерживается после получения команды (т.е серво погрешность высока) то положение разреза при работе будет неточным.
5.5.3.4 Выбор значения ускорения
Принимая во внимание все моменты инерции двигателя и винта, силы трения и torque двигателя вполне возможно вычислить какого ускорения можно достичь с данной погрешностью.
Если от станка вы не требуете огромной производительности, мы рекомендуем задавать такое значение, при которых тестовый запуск и останов звучит нормально. Да это не совсем по научному, но обычно дает хорошие результаты.
5.5.4 Сохранение и тестирование осей
Наконец не забудьте нажать Сохранить Настройки Осей для сохранения уровня ускорения перед тем как двигаться дальше.
Теперь следует проверить ваши вычисления используя MDI чтобы сделать определенное G0 движение. Для точной проверки можно воспользоваться стальной линейкой. Более точный тест можно провести с помощью Дискового Тест Индикатора (DTI)/Часов и плоского бруска. Вообще-то его следует монтировать в держатель инструмента, но для обычного станка можно использовать рамку станка.
Предположим что вы тестируете ось Х и используете 4 дюймовый брусок.
Используйте экран MDI чтобы выбрать дюймы и абсолютные координаты. (G20 G90) Установите зажим на столе и отгоните ось так, чтобы щуп DTI касался ее. Гарантируйте окончание движением в отрицательном направлении Х. Установите шкалу на ноль. Это показано на рисунке 5.13.
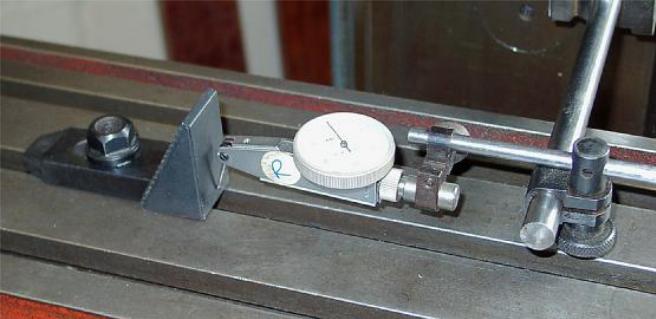
Рисунок 5.13 - Установка нулевой позиции
Теперь используйте MDI экран Mach3 и нажмите кнопку G92X0 чтобы задать отступ и следовательно обнулить DRO оси Х. Переместитесь в положение х = 4.5 с помощью G0 X4.5. Промежуток должен быть около половины дюйма. Если нет, то тогда что-то не так со значением Шагов на Единицу которое вы вычислили. Проверьте и исправьте его.
Положите брусок и передвиньтесь на Х = 4.0. Это движение в отрицательном направлении по Х так же как и прогон, так что эфект обратной подачи будет погашен. Значение на DTI покажет ошибку позиционирования. Она должна быть thou или что-то около того. Это показано на рисунке 5.14.
Уберите брусок и сделайте G0 X0 чтобы проверить нулевое значение. Повторите тест чтобы получить набор из примерно 20 значений и посмотрите насколько различается позиционирование. Если вы получите последовательные ошибки, тогда можно подстроить значение Шагов на Единицу для достижения максимальной точности.

Рисунок 5.14 - Брусок в положении
Теперь нужно проверить, не теряются ли шаги на оси в повторяющихся движениях на скорости. Уберите брусок. Выполните G0 X0 и проверьте нулевое значение на DTI.
Используйте редактор для ввода следующей программы:
F1000 (это быстрее чем возможно но Mach3 ограничит скорость)
G20 G90 (Дюймы и Абсолют)
М98 Р1234 L50 (запустить подзадачу 50 раз)
М30 (стоп)
О1234
G1 X4
G1 X0 (движение туда и обратно)
М99 (возврат)
Нажмите Запуск Цикла для запуска. Убедитесь что движения звучат плавно.
После окончания DTI конечно должно показывать 0. Если что-то не получается, то прийдется лучше настроить максимальный уровень ускорения оси.