

5.5.2.1 Практические испытания скорости двигателя
Ты спас ось после установки Шаги за единицу. ОК диалоговое и убедитесь, что
все питание . Нажмите кнопку Reset , чтобы ее индикатор светится непрерывно .
Вернуться к Config > Motor Tuning и выберите ось . Используйте ползунок Velocity иметь
график около 20% максимальной скорости. Нажмите клавишу курсора вверх на клавиатуре. ось
должны двигаться в направлении Plus . Если убегает затем выберите более низкую скорость. Если это ползает
выберите более высокую скорость . Курсор Вниз сделает его бежать в другую сторону (то есть
Отрицательное направление ) .
Если направление не так, то , Сохраните ось и либо (а) изменить Низкоактивные установку
для Дир штифт оси в Config > портов и Pins > Output закладке Pins ( и применить его ) или (б)
установите соответствующий флажок в Config > Моторные развороты для оси , которую вы используете . вы
может Akso , конечно, просто выключите и обратного одну пару физических соединений с
двигатель от привода электроники.
Если шаговый двигатель гудит или крики то вы проводной его неправильно или вбиваем
это слишком быстро . Маркировка шаговых проводов (особенно 8 проволоки двигатели) иногда очень
запутанной. Вам нужно будет обратиться к документации двигателя и электроники драйверов .
Если серводвигатель убегает на полной скорости или кино и указывает на неисправность на его водителя , то его
арматура (или датчика ) соединения должны вспять (см. ваши серво электроники
документация для более подробной информации ) . Если у вас возникли проблемы вот тогда вам будет приятно , если
Вы последовали совету купить текущих и правильно поддерживаемых продуктов - купить права, купить
один раз!Большинство приводов будут нормально работать с минимальной шириной импульса в 1 микросекунду. Если при тестировании у вас возникли проблемы (например двигатель сильно шумит) для начала проверьте, не перевернуты ли шаговые импульсы (активная low неправильно настроена на вкладке Ножки Выводов окна Порты и Ножки), потом можно например попробовать увеличить ширину импульса до, скажем, 5 микросекунд. Интерфейс Шага и Направления очень прост, но так как это важная часть, при неправильной настройке будет очень трудно обнаружить неполадку без оцилоскопа или очень детальной перепроверки.
5.5.2.2 Вычисление максимальной скорости двигателя
Если вам хочется вычислить максимальную скорость двигателя, то читайте эту главу.
Есть множество факторов, определяющих максимальную скорость оси:
- Максимально допустимая скорость двигателя (возможно 4000 оборотов в минуту для серводвигателя или 1000 оборотов в минуту для шагового)
- Максимально допустимая скорость винта (зависит от длинны, диаметра и т.д.)
- Максимальная скорость привода ремня или понижения коробки передач
- Максимальная скорость, которую поддерживает электроника привода без выдачи сообщения о сбое
- Максимальная скорость обеспечивающая смазку салазок станка
Для вас наиболее важны первые два пункта. Нужно будет обратиться к спецификациям производителя, вычислить разрешенные скорости винта и двигателя и соотнести их к единицам в секунду движения оси. Задайте это максимальное значение для нужной оси в окне Velocity (скорость) Настройки Двигателя.
5.5.2.3 Автоматическое задание Шагов на Единицу
Возможно вам не удастся измерить скорость (gearing) привода оси или узнать точную подачу винта. Можно измерить расстояние на которое перемещается ось, а потом позволить Mach3 высчитать необходимое значение шагов на единицу.
Рисунок 5.12 показывает кнопку на экране настроек, которую нужно нажать для запуска этого процесса. Вас спросят какую ось нужно использовать.
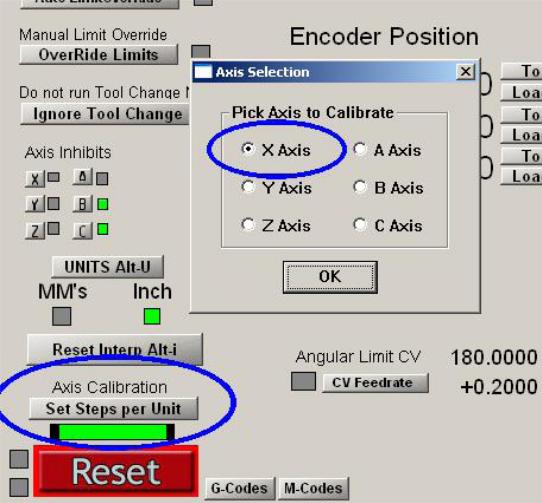
Рисунок 5.12 - Автоматическая настройка шагов на единицу
Потом нужно ввести номинальное расстояние движения. Mach3 проедет это расстояние. Будьте готовы нажать кнопку экстренного останова если ось заедет слишком далеко. Наконец вам предложат измерить и ввести реальное расстояние, которое было пройдено. Это значение будет использовано для вычисления реального значения Шагов на Единицу оси вашего станка.
5.5.3 Определение ускорения