

4.1.3. Переходные процессы постоянного тока смешанного возбуждения
а) Схема электродвигателя постоянного тока смешанного возбуждения имеет вид:
Как видно из схемы электродвигатель постоянного тока смешанного возбуждения имеет две обмотки возбуждения:
параллельную ОВШ (обмотка возбуждения шунтовая)
последовательную ОВС (обмотка возбуждения сериесная)
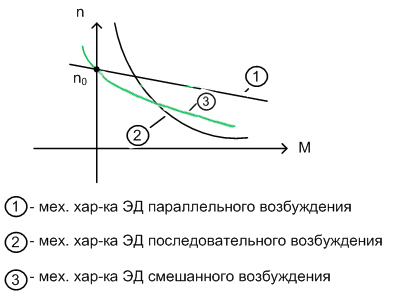
Следовательно, ему присущи особенности работы (в определенной степени) как двигателей с параллельным, так и с последовательным возбуждением. Поэтому механическая характеристика электродвигателя смешанного возбуждения тоже занимает промежуточное положение между механическими характеристиками этих двух видов электродвигателей (последовательного и параллельного возбуждения).
б) Пуск электродвигателя постоянного тока смешанного возбуждения так же описывается формулой закона Ома для работающего электродвигателя: .
При пуске
,
следовательно ток
,
и, следовательно, для уменьшения пускового
тока необходимо либо уменьшить подводимое
напряжение (U),
либо ввести дополнительное сопротивление
в цепь якоря
![]() .
В первом случае (уменьшение величины
подводимого напряжения) механические
характеристики будут представлять
собой семейство кривых почти параллельных
естественной механической характеристике.
(«Почти» потому, что с уменьшением
подводимого напряжения будет уменьшаться
действие параллельной (шунтовой) обмотки
и увеличиваться действие последовательной
(сериесной) обмотки).
.
В первом случае (уменьшение величины
подводимого напряжения) механические
характеристики будут представлять
собой семейство кривых почти параллельных
естественной механической характеристике.
(«Почти» потому, что с уменьшением
подводимого напряжения будет уменьшаться
действие параллельной (шунтовой) обмотки
и увеличиваться действие последовательной
(сериесной) обмотки).
Пуск рассмотрим в две ступени:
Пуск производится
при пониженном напряжении
![]() (кривая (3)), при этом
(кривая (3)), при этом
![]() и электродвигатель разгоняется по
кривой (3) пока
и электродвигатель разгоняется по
кривой (3) пока
![]() не станет равным
.
Затем увеличивает подводимое напряжение
до
и электродвигатель переходит на
характеристику (2). И снова
,
следовательно электродвигатель
разгоняется (по характеристике (2)) до
тех пор, пока
станет равным
.
Затем, увеличив напряжение до номинального,
переходим на естественную механическую
характеристику (1).
,
электродвигатель разгоняется по ней
до точки А (когда
).
не станет равным
.
Затем увеличивает подводимое напряжение
до
и электродвигатель переходит на
характеристику (2). И снова
,
следовательно электродвигатель
разгоняется (по характеристике (2)) до
тех пор, пока
станет равным
.
Затем, увеличив напряжение до номинального,
переходим на естественную механическую
характеристику (1).
,
электродвигатель разгоняется по ней
до точки А (когда
).
Реостатный пуск электродвигателя (Пуск с введением дополнительного сопротивления в цепь якоря) также рассмотрим в две ступени. Схема данного процесса имеет вид:
А механические характеристики реостатного пуска (в нашем случае двухступенчатого) будут следующего вида:
При пуске введены
оба добавочных сопротивления
![]() ,
пуск происходит по искусственной
механической характеристике (3). Т.к.
двигатель разгоняется пока
не станет равным
.
Выведя сопротивление
(шунтировав его), электродвигатель
переходит на искусственную механическую
характеристику (2) и (т.к.
)
разгоняется по ней до тех пор, пока
,
пуск происходит по искусственной
механической характеристике (3). Т.к.
двигатель разгоняется пока
не станет равным
.
Выведя сопротивление
(шунтировав его), электродвигатель
переходит на искусственную механическую
характеристику (2) и (т.к.
)
разгоняется по ней до тех пор, пока
![]() .
.
Затем выводится сопротивление - электродвигатель переходит на естественную механическую характеристику (1) и начинает разгоняться по ней ( ) до точки А, где . Электродвигатель работает в установившемся режиме на естественной механической характеристике.
в) Торможение электродвигателя
Динамическое
торможение
– как и у остальных двигателей постоянного
тока достигается, когда якорь
электродвигателя отключается от сети
и замыкается на добавочное сопротивление
(![]() ).
).
Проанализируем формулу .
![]() ,
следовательно
,
следовательно
![]()
Из полученного выражения следует, что ток якоря I поменял свое направление (при неизменном ), следовательно, и электромагнитный момент стал не двигательным, а тормозящим.
Механическая характеристика данного процесса имеет вид:
Угол наклона характеристики динамического торможения зависит от величины .
Генераторное торможение возможно, как и у электродвигателей постоянного тока в двух случаях:
1) когда за счет действия приводного механизма электродвигатель получает скорость больше пороговой частоты вращения (обороты идеального холостого хода);
2) при переходе с более высоких оборотов на более низкие.
Физический смысл процесса и механические характеристики его рассмотри ниже.
Главное, на что
следует обратить внимание – это то, что
результирующий магнитный поток
электродвигателя складывается из
магнитных потоков сериесной (![]() )
и шунтовой (
)
и шунтовой (![]() )
обмоток возбуждения (
)
обмоток возбуждения (![]() ),
т.к. в первом случае
),
т.к. в первом случае
![]() ,
следовательно,
,
следовательно,
![]() ,
следовательно, ток якоря I
поменял свое направление и меняет свое
направление электромагнитный момент
(если
,
следовательно, ток якоря I
поменял свое направление и меняет свое
направление электромагнитный момент
(если
![]() ).
Но как видно из схемы при изменении
направлении тока якоря изменит свое
направление и ток возбуждения сериесной
обмотки, и, следовательно, и направление
магнитного потока сериесной обмотки
(
).
Но как видно из схемы при изменении
направлении тока якоря изменит свое
направление и ток возбуждения сериесной
обмотки, и, следовательно, и направление
магнитного потока сериесной обмотки
(![]() ),
который начнет размагничивать
электродвигатель
),
который начнет размагничивать
электродвигатель
![]() .
А т.к.
при достаточно больших токах якоря
.
А т.к.
при достаточно больших токах якоря
![]() ,
следовательно
,
следовательно
![]() ,
а, следовательно,
.
Возможен «разнос» электродвигателя.
Поэтому первый случай генераторного
торможения используется крайне редко,
либо вообще не используется.
,
а, следовательно,
.
Возможен «разнос» электродвигателя.
Поэтому первый случай генераторного
торможения используется крайне редко,
либо вообще не используется.
Механическая характеристика этого процесса:
Во втором случае механическая характеристика процесса имеет вид:
А схема этого вида торможения:
Двигатель работал
с введенным добавочный сопротивлением
(
)
в цепи обмотки возбуждения (ОВШ) на
характеристике (1). Выведя это добавочное
сопротивление (закоротив его) увеличится
ток обмотки возбуждения шунтовой (ОВШ),
следовательно, увеличится магнитный
поток (ОВШ) (
),
а (т.к.
)
увеличится и общий магнитный поток,
следовательно, двигатель затормозится
(
),
перейдет на характеристику (2) в точку
с (т.к. скорость мгновенно не изменится)
и будет тормозиться до точки A
(когда
),
а участок
![]() - генераторное торможение электродвигателя.
- генераторное торможение электродвигателя.
Торможение противовключением
Так же как у электродвигателей постоянного тока независимого, параллельного и последовательного возбуждения схема данного вида торможения имеет вид:
И достигается так же изменение полярности на якоре электродвигателя (при неизменном магнитном потоке).
Согласно формуле
напряжение на якоре меняет свой знак,
следовательно,
![]() ,
следовательно, ток якоря поменял свое
направление (при неизменном
),
значит, поменял свой знак и электромагнитный
момент и стал тормозным.
,
следовательно, ток якоря поменял свое
направление (при неизменном
),
значит, поменял свой знак и электромагнитный
момент и стал тормозным.
Механическая характеристика данного вида торможения будет иметь вид:
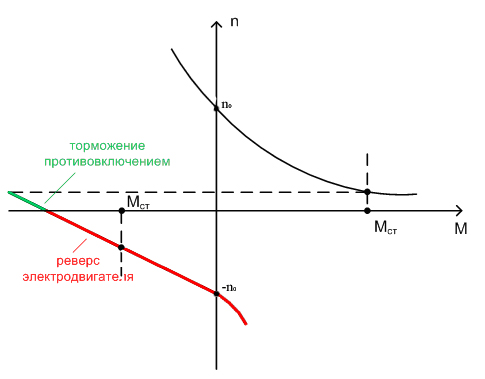
г) Реверс электродвигателя смешанного возбуждения
Достигается (согласно формуле )
либо: - изменением полярности напряжения на якоре электродвигателя при неизменном магнитном потоке ;
либо: - изменением направления магнитного потока, при неизменной полярности на обмотке якоря.
В первом случае схема имеет тот же самый вид, как и при торможении противовключением (реверсивный контур), и описывается теми же формулами и механическая характеристика процесса, так же представлена в предыдущем разделе.
Примечание. Торможение противовключением не подходит для электроприводов с активным статическим моментом. Так как возможен «разнос» электродвигателя (см. раздел «генераторное торможение электродвигателей смешанного возбуждения»).
Данный вид торможения применяется (для двигателей смешанного возбуждения) для электроприводов с реактивными статическим моментом.
Во втором случае (изменение направления магнитного потока при неизменной полярности на якоре электродвигателя) в реверсивный контур должны заключаться обмотки возбуждения электродвигателя.
Что практически используется крайне редко, т.к. кроме такого недостатка как сложность схемы, существует вероятность «разноса» электродвигателя при его перемагничивании ( ; ).
д )
Регулирование оборотов
)
Регулирование оборотов
Для работающего электродвигателя.
Из формулы видно, что регулирование скорости электродвигателя можно осуществлять:
- изменением
величины подводимого напряжения (![]() )
)
- изменением сопротивления в цепи якоря (R)
- изменением
величины магнитного потока (![]() )
)
Однако, существуют
определенные особенности, т.к. с изменением
R
для двигателя
смешанного возбуждения будет меняться
и величина подводимого напряжения к
якорю ЭД. А магнитный поток электродвигателя
будет складываться из магнитного потока
сериесной обмотки возбуждения и шунтовой
обмотки возбуждения (![]() ).
).
Поэтому с изменением величины подводимого напряжения будет сильнее сказываться влияние последовательной (сериесной) обмотки возбуждения.
Механические характеристики регулирования оборотов методом изменения величины подводимого напряжения будет иметь вид:
Двигатель работает
на естественной механической характеристике
(1) в точке A
(
).
Уменьшив напряжение с
![]() до
двигатель переходит на характеристику
(2) и т.к.
до
двигатель переходит на характеристику
(2) и т.к.
![]() - двигатель тормозится до точки B
(
).
Уменьшив напряжение до
- двигатель переходит на механическую
характеристику (3) и начинает тормозиться
(
)
до точки C
(
).
- двигатель тормозится до точки B
(
).
Уменьшив напряжение до
- двигатель переходит на механическую
характеристику (3) и начинает тормозиться
(
)
до точки C
(
).
Механическая характеристика регулирования скорости изменением сопротивления в цепи якоря имеет вид:
А схема (частный случай регулирования оборотов в две ступени) имеет вид:
Двигатель работает в точке A на естественной механической характеристике (1) ( ). Вводим добавочное сопротивление - двигатель переходит на искусственную механическую характеристику (2) и (т.к. ) тормозится до точки B ( ). Вводим еще добавочное сопротивление - электродвигатель переходит на искусственную характеристику (3) и (т.к. ) тормозится до точки C ( ).
Механическая характеристика регулирования скорости изменением величины магнитного потока достигается введением дополнительного сопротивления в цепь шунтовой обмотки возбуждения или закорачивания (шунтирования) сериесной обмотки возбуждения через добавочное сопротивление .
Схема имеет вид:
Рассмотрим для простоты первый случай (второй практически аналогичен, но более сложен в описании, т.к. во втором случает будет меняться напряжение и ток на якоре двигателя).
Механическая характеристика этого процесса:
Двигатель работал на естественной механической характеристике (1) в точке A ( ). Ввели добавочное сопротивление в цепь ОВШ. Двигатель перешел на искусственную механическую характеристику (2) и начал по ней разгоняться (т.к. ) до точки B ( ), затем вводится еще добавочное сопротивление , электродвигатель перешел на работу на искусственной механической характеристике (3) и начал по ней разгоняться (т.к. ) до точки C ( ).
е) Наброс нагрузки
Для электродвигателя это увеличение момента сопротивления (момента статического).
Т.к.
![]() - двигатель тормозится, следовательно,
n
– уменьшается,
следовательно, уменьшается
- двигатель тормозится, следовательно,
n
– уменьшается,
следовательно, уменьшается
![]() (ЭДС), а значит, увеличивается ток якоря
(
),
а значит, возрастает электромагнитный
момент (
(ЭДС), а значит, увеличивается ток якоря
(
),
а значит, возрастает электромагнитный
момент (![]() ).
Электромагнитный момент возрастает
пока
станет равным новому
.
).
Электромагнитный момент возрастает
пока
станет равным новому
.
Примечание 1: Процесс пройдет быстрее, чем у электродвигателей постоянного тока независимого и параллельного возбуждения, т.к. магнитный поток электродвигателя смешанного возбуждения складывается из магнитного потока шунтовой обмотки ( ) и сериесной ( ), т.е. . А с увеличением тока якоря возрастет ток в ОВС, а, следовательно, , а, следовательно, и в целом.
Т.е. переходный процесс пройдет быстрее и с меньшей нагрузкой на якоре ЭД.
Примечание 2 (напоминание из курса электрических машин): Двигатели смешанного возбуждения наряду с выявленными выше недостатками (возможность «разноса» при генераторном торможении и работа только с реактивными моментами) имеет ряд преимуществ:
1) жесткость механической характеристики
2) более быстрый процесс восстановления при набросе нагрузки (при этом увеличение электромагнитного момента происходит при меньших токах якоря, т.е. момент восстанавливается еще и за счет увеличения магнитного потока на сериесной обмотке
3) сериесная обмотка частично компенсирует размагничивающее действие реакции якоря