

4) Реверс электродвигателя. Физический смысл. Схема. Механическая характеристика
Для описания процесса опять используем формулу закона Ома для работающего электродвигателя: . Найдем из этой формулы .
![]()
![]()
![]()
следовательно,
чтобы обороты (n)
стали отрицательными (-n),
нам нужно либо поменять полярность
напряжения (
)
на обмотке якоря (оставив неизменным
магнитный поток
),
либо изменить направление магнитного
потока (![]() ),
оставив без изменения полярность
напряжения на якоре.
),
оставив без изменения полярность
напряжения на якоре.
Следовательно, для изменения направления вращения ЭД постоянного тока необходимо:
- изменить полярность напряжения на обмотке якоря, оставив прежним направление магнитного потока
- изменить направление магнитного потока, оставив неизменным полярность на обмотке якоря
Одновременное изменение полярности на обмотке якоря и обмотке возбуждения реверса не вызовет!!!
Схема, реализующая реверс:
- изменением полярности на обмотке якоря (при постоянном магнитном потоке):
- схема, реализующая
реверс изменением направления магнитного
потока (при неизменной полярности
напряжения на якоре) аналогична
предыдущей, только в реверсивный контур
заключается обмотка возбуждения (ОВ),
а якорь подключается напрямую (ОВ
и Я
поменять местами). Однако, подобная
схема реализуется крайне редко (Автор
подобных схем не встречал), так как
исходя из формулы
![]() в момент переключения и последующего
перемагничивания магнитной цепи машины
в момент переключения и последующего
перемагничивания магнитной цепи машины
![]() ,
а, следовательно,
,
а, следовательно,
![]() ,
т.е. возможен «разнос» электродвигателя.
,
т.е. возможен «разнос» электродвигателя.
Механическая характеристика реверса представляет собой прямую параллельную естественной механической характеристике.
5) Регулирование оборотов электродвигателя. Физический смысл. Механические характеристики
И з
формулы закона Ома для работающего
электродвигателя
,
получим
или , где
- обороты идеального холостого хода
(пограничная частота вращения),
з
формулы закона Ома для работающего
электродвигателя
,
получим
или , где
- обороты идеального холостого хода
(пограничная частота вращения),
![]() перепад
оборотов ЭД, вызванный изменением
нагрузки на его валу (момента сопротивления).
перепад
оборотов ЭД, вызванный изменением
нагрузки на его валу (момента сопротивления).
Как видно из этих формул регулирование скорости ЭД можно осуществлять:
- изменением
величины подводимого напряжения, т.к.
![]() ;
;
- изменением сопротивления в цепи якоря (R);
- изменением
величины магнитного потока (![]() ).
).
Для регулирования оборотов величиной подводимого напряжения существует множество схем, а также регулирование напряжения на самом источнике (Поэтому конкретных схем в данном пособии не приводится. Данные вопросы рассматриваются в курсе электроэнергетических систем м электронной техники).
А механическая характеристика регулирования представляет собой семейство механических характеристик параллельных естественной механической характеристике.
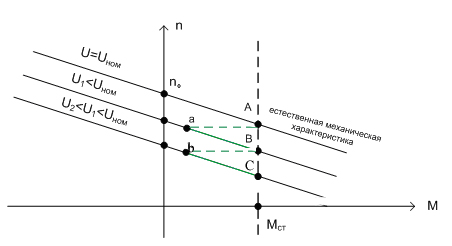
Предположим, мы работали на естественной механической характеристике в точке А ( ).
Для регулирования
оборотов (их уменьшения) уменьшили
подводимое напряжение (с
![]() до
)
в этом случае (т.к. скорость мгновенно
измениться не может) мы перешли в точку
(а) на характеристику при
до
)
в этом случае (т.к. скорость мгновенно
измениться не может) мы перешли в точку
(а) на характеристику при
![]() .
.
В точке (а) момент
электромагнитный (
)
меньше момента статического (
),
следовательно, электропривод тормозится
(по искусственной механической
характеристике при
)
до тех пор, пока момент электромагнитный
не станет равным моменту статическому
(точка B).
При необходимости еще уменьшить скорость,
уменьшаем напряжение до
![]() - электропривод переходит на работу в
точку (b)
(т.к. скорость мгновенно измениться не
может) и в этой точке (b)
момент электромагнитный
меньше момента статического (
),
следовательно, электродвигатель
тормозится (по искусственной механической
характеристике при
)
до тех пор, пока
- электропривод переходит на работу в
точку (b)
(т.к. скорость мгновенно измениться не
может) и в этой точке (b)
момент электромагнитный
меньше момента статического (
),
следовательно, электродвигатель
тормозится (по искусственной механической
характеристике при
)
до тех пор, пока
![]() (точка С).
(точка С).
Схема регулирования оборотов электродвигателя путем изменения сопротивления в цепи обмотки якоря имеет вид:
А механическая характеристика регулирования имеет вид:
Предположим, что
двигатель работает на естественной
механической характеристике в точке А
(
).
Для уменьшения оборотов мы вводим в
цепь якоря часть регулировочного
сопротивления
![]() .
Электродвигатель переходит на
искусственную механическую характеристику
(
.
Электродвигатель переходит на
искусственную механическую характеристику
(![]() )
в (а) (т.к. скорость не изменится мгновенно).
В точке (а) момент электромагнитный
меньше момента статического, следовательно
двигатель тормозится до точки B
(когда
).
Вводим еще часть сопротивления
)
в (а) (т.к. скорость не изменится мгновенно).
В точке (а) момент электромагнитный
меньше момента статического, следовательно
двигатель тормозится до точки B
(когда
).
Вводим еще часть сопротивления
![]() .
Электродвигатель переходит на
искусственную механическую характеристику
(
.
Электродвигатель переходит на
искусственную механическую характеристику
(![]() )в
точку (b).
В точке (b)
)в
точку (b).
В точке (b)
![]() ,
следовательно, двигатель тормозится
до точки С (
).
,
следовательно, двигатель тормозится
до точки С (
).
Схема регулирования оборотов изменением величины магнитного потока имеет вид:
А механическая характеристика – прямые с изменяющейся жесткостью, уменьшение магнитного потока делает механическую характеристику более мягкой (т.е. скорость более зависит от момента), а увеличение – более жесткой.
Механическая характеристика процесса:
В первоначальный
момент электродвигатель работает в
точке А на естественной механической
характеристике (![]() ).
Вводим часть сопротивления (
).
Вводим часть сопротивления (![]() )
в цепь обмотки возбуждения, т.е. уменьшим
магнитный поток, электродвигатель
переходит на характеристику (1) в точку
(а). В точке (а)
)
в цепь обмотки возбуждения, т.е. уменьшим
магнитный поток, электродвигатель
переходит на характеристику (1) в точку
(а). В точке (а)
![]() ,
следовательно, двигатель разгоняется
по искусственной характеристике (1) пока
(точка B).
Вводим еще часть сопротивления
,
т.е. еще сильнее уменьшим магнитный
поток (
,
следовательно, двигатель разгоняется
по искусственной характеристике (1) пока
(точка B).
Вводим еще часть сопротивления
,
т.е. еще сильнее уменьшим магнитный
поток (![]() )
– двигатель перейдет на искусственную
механическую характеристику (2) в точку
(b)
и т.к.
)
– двигатель перейдет на искусственную
механическую характеристику (2) в точку
(b)
и т.к.
![]() станет больше
станет больше
![]() двигатель разгоняется по характеристике
(2) пока
не станет равным
(точка С).
двигатель разгоняется по характеристике
(2) пока
не станет равным
(точка С).