

Поворот
Уравнение поворота (3) можно представить в виде:
 . (18)
. (18)
Полагая
 ,
,
имеем:
![]() . (19)
. (19)
Перемножив, получим:
![]() .
.
Докажем,
что два последовательных поворота
аддитивны. Если точку
повернуть на угол
![]() в точку
,
а точку
в точку
,
а точку
![]() — в точку
при повороте на угол
— в точку
при повороте на угол
![]() ,
то общий поворот равен
,
то общий поворот равен
![]() .
.
Доказательство:

![]() .
.
Найдем
![]() :
:

2.3. Композиции двумерных преобразований
Но
обычно при работе с графической системой
объект подвергается сразу нескольким
преобразованиям. Для получения желаемого
результата используют композицию
преобразований, объединяя матрицы
![]() .
К точке более эффективно применять одно
результирующее преобразование, чем ряд
преобразований последовательно.
.
К точке более эффективно применять одно
результирующее преобразование, чем ряд
преобразований последовательно.
Рассмотрим,
например, поворот объекта относительно
некоторой точки
![]() .
.
До этого был рассмотрен поворот относительно начала координат. Для решения этой задачи разобьем ее на три части (три элементарных преобразования):
Перенос точки
 в начало координат),
в начало координат),
 .
.Поворот,
 .
.
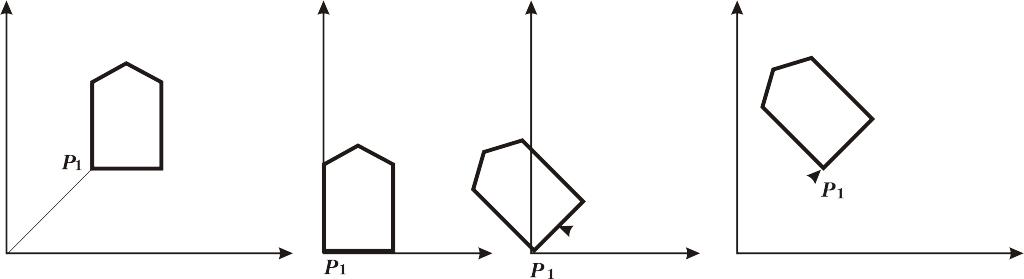
Рис. 2.5
Перенос точки из начала координат в начальную позицию,
 .
.
Результирующее преобразование имеет вид:
![]() ,
,
или:
Этот пример хорошо иллюстрирует, как применение однородных координат упрощает задачу.
Аналогично, если надо промасштабировать объект относительно точки , а не начала координат, то надо:
Перенести точку в начало координат, .
Масштабировать,
 .
.Перенести точку назад, .
Результат имеет вид:

Если надо промаштабировать, повернуть и расположить в нужном месте домик, (центром поворота и масштабирования является точка ), то необходимо выполнить:
Перенос точки в начало координат, .
Масштабирование, .
Поворот, .
Перенос точки из начала координат назад, .
В
структуре данных, в которой содержится
это преобразование, могут находиться
масштабный коэффициент
,
угол поворота
и координаты
![]() .
Но может быть и записана матрица
результирующего преобразования:
.
Но может быть и записана матрица
результирующего преобразования:
![]() .
.
2.4. Матричное представление трехмерных преобразований
Аналогично
тому, как двумерные преобразования
описываются матрицами размером
![]() ,
трехмерные могут быть представлены в
виде матриц
,
трехмерные могут быть представлены в
виде матриц
![]() .
И тогда трехмерная точка
.
И тогда трехмерная точка
![]() записывается в однородных координатах
как
записывается в однородных координатах
как
![]() ,
где
,
где
![]() .
Если же
.
Если же
![]() ,
то точка представляется в виде
,
то точка представляется в виде
![]() .
.
Перенос
Трехмерный перенос является простым расширением двумерного:

![]()
![]() .
.
Масштабирование
Расширяется аналогичным образом:

![]() ,
,
или
![]() .
.
Поворот
Двумерный
поворот, рассмотренный ранее, является
в то же время трехмерным поворотом
вокруг оси
![]() .
.
 .
.
Матрица поворота вокруг оси :
 .
.
Матрица поворота вокруг оси :
 .
.
 При
сложном повороте, он раскладывается на
составляющие:
При
сложном повороте, он раскладывается на
составляющие:
Рис. 2.6
![]() — поворот
вокруг оси
до совмещения с плоскостью
— поворот
вокруг оси
до совмещения с плоскостью
![]() ;
;
![]() — поворот
вокруг оси
до совмещения с полуосью
.
— поворот
вокруг оси
до совмещения с полуосью
.
2.5. Композиция трехмерных преобразований
Путем объединения элементарных трехмерных преобразований можно получить другие преобразования.

Рис. 2.7
Пример.
Преобразовать отрезок
![]() из начальной позиции в конечную таким
образом, чтобы точка
совпала с началом координат, а отрезок
располагается вдоль отрицательной
полуоси
из начальной позиции в конечную таким
образом, чтобы точка
совпала с началом координат, а отрезок
располагается вдоль отрицательной
полуоси
![]() .
.
На длины отрезков преобразование не воздействует.
Для выполнения этой задачи рассмотрим три шага:
Перенос точки
 в начало координат.
в начало координат.Поворот вокруг оси до совмещения отрезка с плоскостью
 .
.Поворот вокруг оси до совмещения отрезка с отрицательной полуосью .
 Шаг
1
Шаг
1
Рис. 2.8

Применим
![]() к
к
![]() :
:

 Шаг
2
Шаг
2
Рис. 2.9
Поворот вокруг оси на угол (угол положительный)
 ,
,
где
![]() .
.
Подставляя эти выражения в матрицу поворота, находим:

Шаг 3
Поворот
вокруг оси
![]() (угол отрицательный)
(угол отрицательный)

Рис. 2.10
 ,
,
Где
![]() .
.
Результат поворота:
![]() ,
,
теперь отрезок совпадает с осью .