

25. Архитектура мк.
Перифер. уст-ва имеет:
- 8 бит. таймер – счетчик;
- 16 бит. таймер – счетчик;
- сторожевой таймер;
- одно- и двухканальные генераторы 8 бит. ШИМ сигнала;
- генераторы ШИМ сигнала регулир. разрядности;
- аналоговые компараторы;
- последовательный двунаправленный интерфейс;
- до 4х полудуплексных синхронных/асинхронных приемопередатчиков;
- универсальный последовательный интерфейс.
Ядро МК имеет вид:
АЛУ выполняет все вычисления подключ. непосред. к 32-м рабочим регистрам, объедененным в регистровый файл. Благодаря этому АЛУ может выполнять одну операцию, т.е. чтение содержимого регистра, выполнение операций, запись рез-та обратно в регистровый файл и всё это за один такт.
В этих МК реализована гарвардская архитектура, характеризующаяся разделение памяти программ и данных, каждый из которых имеет собственные шины доступа. Такая организация позволяет одновременно работать как с памятью программ, так и с памятью данных. Разделение информационных шин позволяет использовать для каждого типа памяти шины различной разрядности, причем способы адресации и доступа к каждому типу памяти также различны. Всё это позволяет достичь быстродействия 1 млн. опер./с при частоте 1 МГц.
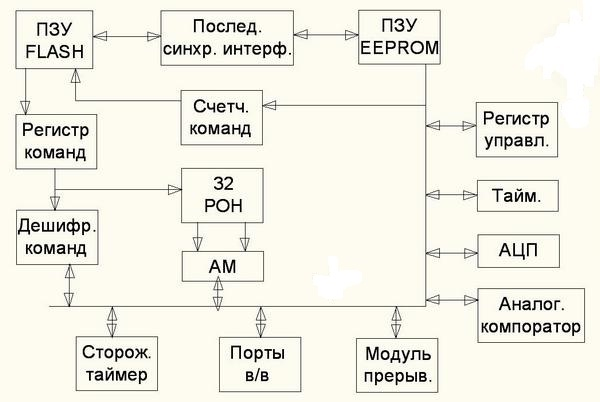
Структура МК ATMega8:

1 – сторожевой таймер, 2 – узел супервизора питания, 3 – генератор сторожевого таймера, 4 – флеш память программ, 5 – ОЗУ, 6 – узел управления и синхронизации, 7 – ППЗУ с электрическим стиранием, 8 – таймер-счетчик 8 бит.(t0), 9 - таймер-счетчик 16 бит.(t1), 10 – АЦП, 11 - таймер-счетчик 8 бит.(t2), 12 – аналоговый компаратор, 13 – внутренний источник опорного напряжения, 14 - синхронно/асинхронный приемопередатчик, 15 – последовательный порт, 16 – двунаправленный приемопередатчик, 17 – порт D 8 бит., 18 – порт B 8 бит., 19 – порт C 7 бит..
МК ATMega8 ЭВМ фирмы Atmel явл. 8 бит. МК предназначенным для исп. во встраеваемых приложениях. Они изготовлены малопотребл. КМОП технологии, кот. в сочетании с усоверш. RISC архитектурой позволяет добиться наилучшего соотношения стоимость – быстродействие – энергопотребление.
26. Характеристика основных компонентов мк.
Обычно в составе МК присутствуют следующие периферийные устройства:
- универсальные цифровые порты;
- различные интерфейсы;
- АЦП и ЦАП;
- компараторы;
- ШИМ;
- таймеры;
- контроллеры безколлекторных двигателей;
- радиочастотные приемники и передатчики;
- встроенный тактовый генератор;
- контроллеры дисплеев и клавиатур.
Хар-ки процессора:
- АЛУ подлючается непосредственно к регистрам общ. назначения;
- больш. команд вып. за один такт;
- векторн. сист. прерываний;
- наличие аппаратного умножителя;
- полностью статическая архитектура (мин. такт частота = 0).
АЛУ выполняет все вычисления подключ. непосред. к 32-м рабочим регистрам, объедененным в регистровый файл. Благодаря этому АЛУ может выполнять одну операцию, т.е. чтение содержимого регистра, выполнение операций, запись рез-та обратно в регистровый файл и всё это за один такт.
Хар-ки подсистемы в/в:
- программн. конфигурирование и выбор портов в/в;
- входные буферы с триггером Шмидта на всех выводах;
- на всех входах имеются индукт. отключаемые внутренние подтягивающие регистры.
Порты в/в:
Каждый порт МК сост. из опред числа выводов через кот может осущ как прием , так и выдача инф. Задание направления передачи данных через любой контакт может быть произведено программно в любой момент времени. Выходные буферы портов симетр. нагрузочную характеристику обеспеч. высокую нагрузочную способность при любом уровне сигнала. Нагрузочной способности достаточно для непосредственного управления светодиодными индикаторами.
Широтно Импульсная Модуляция (PWM - Pulse Width Modulation) это способ задания аналогового сигнала цифровым методом, то есть из цифрового выхода, дающего только нули и единицы получить какие-то плавно меняющиеся величины. При ШИМ на выход подаётся сигнал состоящий из высоких и низких уровней (включаем и выключаем двигатель), то есть нулей и единицы. А затем это все пропускается через интегрирующую цепочку (в случае с двигателем интегратором является маховик). В результате интегрирования на выходе будет величина напряжения, равная площади под импульсами. ATMega8 имеет аппаратные средства для генерирования сигналов ШИМ. Для этого используется Таймер/Счётчик 1 (16 бит) или Таймер/Счётчик 2 (8 бит), включённый в соответствующем режиме.