

21. Архитектура плк.
22. Характеристика основных компонентов плк.
Архитектурой ПЛК называют набор основных компонентов и связей между ними. Типовой ПЛК включает:
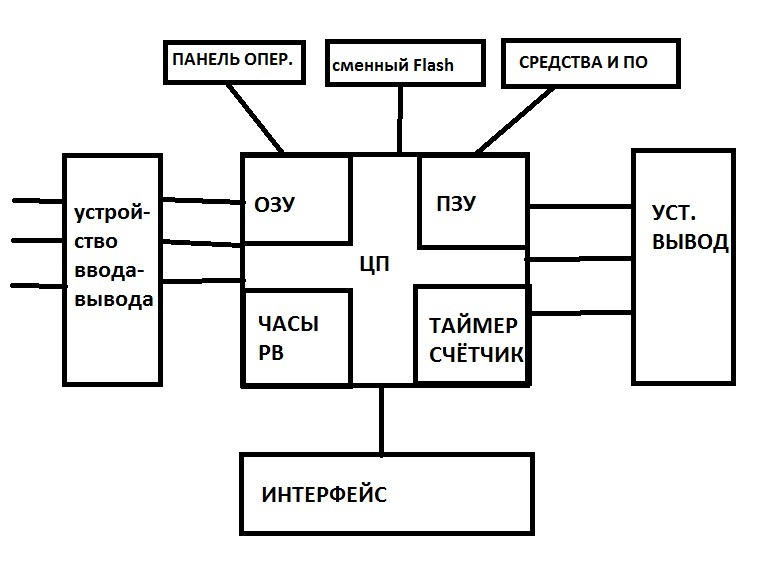
Процессорный модуль включает в себя микропроцессор, основными характеристиками которого является разрядность (8/16/32), тактовая частота, температурный диапазон, потребляемая мощность. Производительность микропроцессоров с одной и той же архитектурой пропорциональна тактовой частоте. Большинство ПЛК используют RISC-процессоры.
RISC-процессор позволяет большинство команд выполнить за 1 машинный такт. Это повышает производительность работ. Для ПЛК высокого уровня выполняющих интенсивную математическую обработку данных используются вспомогательные процессоры выполняющие операции с плавающей запятой.
Ёмкость памяти определяет количество переменных, которые могут быть обработаны в процессе функционирования ПЛК. Время доступа к памяти один из главных факторов ограничивающих быстродействие, поэтому память делят на несколько уровней иерархии в зависимости от частоты использования хранящихся в ней данных и быстродействия. Основными типамипамяти являются ПЗУ, ОЗУ, набор регистров. Регистры являются самыми быстродействующими элементами памяти, используются АЛУ для исполнения элементарных команд процессора. ПЗУ используется для хранения информации: ОС, драйверы устройств, загрузки и др. ОЗУ используется для хранения данных, которые многократно изменяются в процессе работы ПЛК (например значение переменных, результаты промежуточных вычислений, данные для отображения и т.д.). В качестве ПЗУ обычно используется ППЗУ (электрически стираемая). Разновидностью является флеш-память. Количество циклов записи в ППЗУ ограничено и может достигать до нескольких десятков тысяч раз. В качестве ОЗУ может использоваться статическая и динамическая память.
Некоторые ПЛК используют автономное питание для сохранения работоспособности системы при кратковременном отключении питания. Программирования контроллеров малой мощности выполняется с помощью кнопок расположенных на панели или с помощью переносного пульта. В качестве такого пульта может использоваться ноутбук. Сторожевой таймер представляет собой счётчик, который считает импульсы генератора и в нормальном режиме периодически сбрасывается (если процессор зависает, то сигналы сброса не поступают в счётчик, он продолжает считать и при достижении некоторого порога вырабатывает сигнал сброса для перезагрузки процессора).
RTC – кварцевые часы, которые питаются от батарейки и продолжают идти при отключении питания.
Процессор выполняет задачи: данные из модуля ввода-вывода в память и отсылает данные из памяти в модули вывода; осуществляет обмен с промышленной сетью.
Характеристики ЦП: тип ОС, наличие исполнительной среды для стационарной системы программирования, типы поддерживаемых интерфейсов, типы поддерживаемых сетей. Возможность подключения устройств индикации, разрядность, время выполнения команд, типы встроенных функций. Источники питания: 12, 24, 48 В.
Характеристики:
Производительность: длительность контрольного цикла, время выполнения команд, пропускная способность между контроллером и модулями ввода-вывода, пропускная способность промышленной сети, время реакции.
Время реакции – интервал времени от момента появления воздействия на систему до момента выработки соответствующей реакции. Зависит от длительности рабочего цикла.
В контроллерах могут быть предусмотрены следующие функции диагностики:
- обнаружение ошибок ЦПУ;
-сигнализация срабатывания сторожевого таймера;
- отказ батареи или источника питания;
- сбой памяти;
- проверка программы пользователя;
- обнаружения обрыва или КЗ в цепи датчика или нагрузки.
Возможность «горячей» замены элементов системы; надёжность: наработка на отказ; Наличие горячего рестарта (запуск ПЛК после отключения настолько быстр, что все динамические переменные не успевают измениться); помехоустойчивость: оценивается по стандартам электромагнитной совместимости.